You might also like
- Stranger Things Episode Script 2 05 Chapter Five Dig DugDocument67 pagesStranger Things Episode Script 2 05 Chapter Five Dig Dugyonas123No ratings yet
- Chord Implementation Using RMIDocument8 pagesChord Implementation Using RMIPulkit Aggarwal0% (1)
- B&A Performance AnalysisDocument16 pagesB&A Performance AnalysisNathalia Caroline100% (1)
- Chord: A Scalable Peer-To-Peer Lookup Service For Internet ApplicationsDocument32 pagesChord: A Scalable Peer-To-Peer Lookup Service For Internet ApplicationsBlack KnightNo ratings yet
- Peer-to-Peer (P2P) Systems: DHT, Chord, PastryDocument122 pagesPeer-to-Peer (P2P) Systems: DHT, Chord, PastryZahra KhaerunnisaNo ratings yet
- Chord: A Scalable Peer-To-Peer Look-Up Protocol For Internet ApplicationsDocument46 pagesChord: A Scalable Peer-To-Peer Look-Up Protocol For Internet Applicationsasiff_506No ratings yet
- Chord: A Scalable Peer-to-Peer Lookup Service For Internet ApplicationsDocument33 pagesChord: A Scalable Peer-to-Peer Lookup Service For Internet ApplicationssushmsnNo ratings yet
- ChordDocument47 pagesChordprateekpuranik3No ratings yet
- Decentralized Architectures: P2P Chord DHTDocument38 pagesDecentralized Architectures: P2P Chord DHTTESFAHUNNo ratings yet
- Pastry: Scalable, Decentralized Object Location and Routing For Large-Scale Peer-To-Peer SystemsDocument41 pagesPastry: Scalable, Decentralized Object Location and Routing For Large-Scale Peer-To-Peer SystemssushmsnNo ratings yet
- Chord (Peer-To-Peer) : Computing Peer-To-Peer Distributed Hash Table Key-Value PairsDocument7 pagesChord (Peer-To-Peer) : Computing Peer-To-Peer Distributed Hash Table Key-Value PairsarunkmmbaiNo ratings yet
- Structured P2P Networks by Example Chord, DKS (N, K, F) : Jun QinDocument11 pagesStructured P2P Networks by Example Chord, DKS (N, K, F) : Jun Qinsorin092004No ratings yet
- Pastry peer-to-peer network designDocument4 pagesPastry peer-to-peer network designEason YeungNo ratings yet
- Routing Protocols of Distributed Hash Table Based Peer To Peer NetworksDocument5 pagesRouting Protocols of Distributed Hash Table Based Peer To Peer NetworksInternational Organization of Scientific Research (IOSR)No ratings yet
- Chord: A Scalable Peer-To-Peer Lookup Protocol For Internet ApplicationsDocument25 pagesChord: A Scalable Peer-To-Peer Lookup Protocol For Internet ApplicationssushmsnNo ratings yet
- VBI-Tree: A Peer-to-Peer Framework For Supporting Multi-Dimensional Indexing SchemesDocument17 pagesVBI-Tree: A Peer-to-Peer Framework For Supporting Multi-Dimensional Indexing SchemesSuradet ChaimongkolNo ratings yet
- Distributed Hash TablesDocument33 pagesDistributed Hash TablesAnonymous zN7CjfgnENo ratings yet
- CUDA Tricks PDFDocument33 pagesCUDA Tricks PDFLuis CarlosNo ratings yet
- Range-Free Localization Using Expected Hop Progress WSNDocument31 pagesRange-Free Localization Using Expected Hop Progress WSNpradnyuNo ratings yet
- (Last Week) : - Macroscopic Continuous Concentration RatesDocument54 pages(Last Week) : - Macroscopic Continuous Concentration RatesSatyam MohlaNo ratings yet
- Data Encryption Standard - DES and Other Symmetric Block CiphersDocument74 pagesData Encryption Standard - DES and Other Symmetric Block CiphersPaksmilerNo ratings yet
- Pseudo LTEDocument45 pagesPseudo LTEritgailmatheologicNo ratings yet
- Chord: A Scalable Peer-To-Peer Lookup Protocol For Internet ApplicationsDocument31 pagesChord: A Scalable Peer-To-Peer Lookup Protocol For Internet ApplicationsOqba Alshek AliNo ratings yet
- Lecture 4 Block Ciphers, DES, AESDocument82 pagesLecture 4 Block Ciphers, DES, AESMohammad BangeeNo ratings yet
- FPGA-based Prototyping of IEEE 802.11a Baseband ProcessorDocument12 pagesFPGA-based Prototyping of IEEE 802.11a Baseband ProcessorvandalashahNo ratings yet
- Dsa GFG C++Document81 pagesDsa GFG C++Vamsi KrishnaNo ratings yet
- Security Enhanced Key Predistribution Scheme Using Transversal Designs and Reed Muller Codes For Wireless Sensor NetworksDocument16 pagesSecurity Enhanced Key Predistribution Scheme Using Transversal Designs and Reed Muller Codes For Wireless Sensor NetworksAIRCC - IJNSANo ratings yet
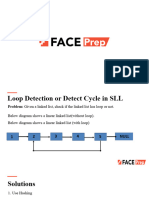
- 1-Loop Detection-04-01-2024Document11 pages1-Loop Detection-04-01-2024amitheserathinasamyNo ratings yet
- Lecture 6Document31 pagesLecture 6Fadhili DungaNo ratings yet
- Rajarajeshwari College Data Structures Internals AssessmentDocument5 pagesRajarajeshwari College Data Structures Internals AssessmentSneha GowdaNo ratings yet
- Lecture 13 - Hash TablesDocument51 pagesLecture 13 - Hash Tableshao05500550No ratings yet
- DAA ReportDocument6 pagesDAA Reportkhushal issraniNo ratings yet
- Neural Networks in MATLABDocument13 pagesNeural Networks in MATLABHugo BadilloNo ratings yet
- Digital Signal Processing ExplainedDocument24 pagesDigital Signal Processing ExplainedözlemArtukNo ratings yet
- CSD - Reviews09-HashingDocument25 pagesCSD - Reviews09-HashingNguyen Dang Minh Thuan (K13HCM)No ratings yet
- Linked ListDocument51 pagesLinked ListTasbiul Hasan Towsif 2131741042No ratings yet
- 1 Stream Ciphers vs. Block Ciphers: Lecture Notes 13: Private-Key Encryption in PracticeDocument4 pages1 Stream Ciphers vs. Block Ciphers: Lecture Notes 13: Private-Key Encryption in PracticeOlalekan_Phill_8283No ratings yet
- Eliasmith2012-Large-Scale Model of The Brain-SupplDocument38 pagesEliasmith2012-Large-Scale Model of The Brain-Suppliulia andreeaNo ratings yet
- Weaknesses in The Key Scheduling Algorithm of RC4Document24 pagesWeaknesses in The Key Scheduling Algorithm of RC4Sigifredo Segundo Thomas CampoNo ratings yet
- 06 Network Models-2Document46 pages06 Network Models-2watriNo ratings yet
- Lecture 5: Linear Sorting: ReviewDocument5 pagesLecture 5: Linear Sorting: ReviewVan Vy HongNo ratings yet
- ChordDocument15 pagesChordSyed Farhan FaroghNo ratings yet
- Pertemuan 8Document30 pagesPertemuan 8lulancNo ratings yet
- Min Cost PathDocument10 pagesMin Cost PathAnandPandyaNo ratings yet
- Kendriya Vidyalaya Sangathan: Chennai Region Practice Test 2020 - 21 Class XiiDocument6 pagesKendriya Vidyalaya Sangathan: Chennai Region Practice Test 2020 - 21 Class XiiRamanKaurNo ratings yet
- Chapter 1Document50 pagesChapter 1farouq_razzaz2574No ratings yet
- Dijkstras Algorithm With Fibonacci Heaps An ExecuDocument11 pagesDijkstras Algorithm With Fibonacci Heaps An ExecuLEYDI DIANA CHOQUE SARMIENTONo ratings yet
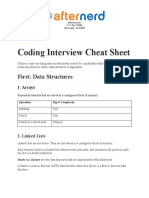
- Coding Interview Cheat SheetDocument5 pagesCoding Interview Cheat SheetManish Bhatt100% (1)
- Cryptography CS 555: Topic 10: Block Cipher Security & AESDocument26 pagesCryptography CS 555: Topic 10: Block Cipher Security & AESAswini KnairNo ratings yet
- 08 Networks + Short Route + Spanning (20211203)Document29 pages08 Networks + Short Route + Spanning (20211203)Lakshmi Harshitha mNo ratings yet
- DAA All-QuizzesDocument9 pagesDAA All-QuizzesPM KINGNo ratings yet
- p2p and DHT in ITDocument27 pagesp2p and DHT in ITKAUSHAL SINGHNo ratings yet
- SE-Comps SEM3 DS-CBCGS DEC19 SOLUTIONDocument30 pagesSE-Comps SEM3 DS-CBCGS DEC19 SOLUTIONTauros OPNo ratings yet
- 18 Radix SortDocument51 pages18 Radix SortFabio FirminoNo ratings yet
- Ds PresentationDocument25 pagesDs PresentationAkhil MishraNo ratings yet
- NR PSS and SSS Design ProposalDocument23 pagesNR PSS and SSS Design ProposalMantesh TNo ratings yet
- ROOT CSC11-Handout PDFDocument173 pagesROOT CSC11-Handout PDFjoao da silvaNo ratings yet
- CH08a - Finite Element ProgrammingDocument11 pagesCH08a - Finite Element ProgrammingAbenesh Kumaresan100% (1)
- Review of Routing Protocols for Mobile Wireless NetworksDocument32 pagesReview of Routing Protocols for Mobile Wireless NetworksAbinaya RagaventhirarNo ratings yet
- Sequences List StringDocument30 pagesSequences List Stringusersome6No ratings yet
- DES SlideDocument34 pagesDES SlideInshal AyazNo ratings yet
- Part of Speech QuestionsDocument4 pagesPart of Speech QuestionsNi Luh Ari Kusumawati0% (1)
- 333 Sapugay v. CADocument3 pages333 Sapugay v. CAJoshua Ejeil PascualNo ratings yet
- Milking MachineDocument10 pagesMilking Machineuniversaldairy100% (2)
- Chapter 4 Designing Your SolutionDocument22 pagesChapter 4 Designing Your SolutionRamona Isabel UrsaisNo ratings yet
- Processed oDocument2 pagesProcessed oHemanth KumarNo ratings yet
- Metrology Instruments Calibration Guide: Mitutoyo Asia PacificDocument6 pagesMetrology Instruments Calibration Guide: Mitutoyo Asia PacificLuis Eduardo García MaltosNo ratings yet
- FentonTech Wastewater Ghernaout 2020Document29 pagesFentonTech Wastewater Ghernaout 2020BrankNo ratings yet
- 7 Tips For A Tidy Desk - ExercisesDocument4 pages7 Tips For A Tidy Desk - Exercisesjosh acNo ratings yet
- 03 IoT Technical Sales Training Industrial Wireless Deep DiveDocument35 pages03 IoT Technical Sales Training Industrial Wireless Deep Divechindi.comNo ratings yet
- Function of Public Sector BanksDocument51 pagesFunction of Public Sector BanksdynamicdeepsNo ratings yet
- Ode To The Spell Checker TCHDocument1 pageOde To The Spell Checker TCHCamila PaulucciNo ratings yet
- Doctor Who - In-Vision 074 - Resurrection of The Daleks PDFDocument19 pagesDoctor Who - In-Vision 074 - Resurrection of The Daleks PDFTim JonesNo ratings yet
- Salman Sahuri - Identification of Deforestation in Protected Forest AreasDocument9 pagesSalman Sahuri - Identification of Deforestation in Protected Forest AreaseditorseajaetNo ratings yet
- Self Unbound Ego Dissolution in PsychedelicDocument11 pagesSelf Unbound Ego Dissolution in Psychedelicszucsanna123456789No ratings yet
- Ch01 Standard Methods and PractisesDocument44 pagesCh01 Standard Methods and PractisesUsman FarooqNo ratings yet
- JAWABAN UTS Bahasa Inggris II Keperawatan Dewi YuniarDocument3 pagesJAWABAN UTS Bahasa Inggris II Keperawatan Dewi Yuniarovan maysandyNo ratings yet
- Mena Vat 2018Document32 pagesMena Vat 2018Mukesh SharmaNo ratings yet
- Volume 47, Issue 50, December 9, 2016Document45 pagesVolume 47, Issue 50, December 9, 2016BladeNo ratings yet
- Coral Poaching in The Philippine: By: Aika Fore M. Garcia LLB 2CDocument16 pagesCoral Poaching in The Philippine: By: Aika Fore M. Garcia LLB 2CAika Fore GarciaNo ratings yet
- Playfair Cipher: Cipher Is A Manual Symmetric Encryption Technique and Was The First LiteralDocument9 pagesPlayfair Cipher: Cipher Is A Manual Symmetric Encryption Technique and Was The First LiteralJOHN CHARLASNo ratings yet
- American SpartansDocument4 pagesAmerican SpartansArya V. VajraNo ratings yet
- Civil Rights Web-QuestDocument5 pagesCivil Rights Web-Questapi-367833271No ratings yet
- NCP For Ineffective Airway ClearanceDocument3 pagesNCP For Ineffective Airway ClearanceJennelyn BayleNo ratings yet
- Cookery 10Document5 pagesCookery 10Angelica CunananNo ratings yet
- Micro-Finance: 16 Principles of Grameen BankDocument5 pagesMicro-Finance: 16 Principles of Grameen BankHomiyar TalatiNo ratings yet
- Ish300 Chapter 3Document20 pagesIsh300 Chapter 3Amanina AyuniNo ratings yet
- African Journalof Auditing Accountingand FinanceDocument13 pagesAfrican Journalof Auditing Accountingand FinanceTryl TsNo ratings yet
- Alat Studio Dan KomunikasiDocument14 pagesAlat Studio Dan Komunikasiraymon akbarNo ratings yet