You might also like
- Relay Working: What Is A Relay?Document5 pagesRelay Working: What Is A Relay?aliNo ratings yet
- What Is A Relay?: Types of Relays How To Test A RelayDocument7 pagesWhat Is A Relay?: Types of Relays How To Test A RelaySarath Chandra SaiNo ratings yet
- RELAYSDocument16 pagesRELAYSgonebow303No ratings yet
- Magnetic RelayDocument4 pagesMagnetic RelaySarah Rivie Mae BeloroNo ratings yet
- Relays: BY Jaya TejaDocument10 pagesRelays: BY Jaya TejatateneniNo ratings yet
- Industrial AutomationDocument38 pagesIndustrial Automationvineet ChoudharyNo ratings yet
- How Relays Work: Electromechanical Relays Vs Solid State RelaysDocument5 pagesHow Relays Work: Electromechanical Relays Vs Solid State RelaysSaad NasirNo ratings yet
- Know About Different Types of Relays PDFDocument17 pagesKnow About Different Types of Relays PDFmohanNo ratings yet
- Industrial Electric RelayDocument26 pagesIndustrial Electric Relaysyed muazzam shah putraNo ratings yet
- Presentation Topic: Relay: Presentation Maker: Nasim Ahmed Id: 183-33-796 Section: PC-A (Evening)Document9 pagesPresentation Topic: Relay: Presentation Maker: Nasim Ahmed Id: 183-33-796 Section: PC-A (Evening)01MHNasim The Motivator & The Public SpeakerNo ratings yet
- Relay: This Article Is About The Electronic Component. For Other Uses, SeeDocument11 pagesRelay: This Article Is About The Electronic Component. For Other Uses, SeeAkash MohantyNo ratings yet
- Relay: Relay Is Basically A Magnetism Based Switch. It Consists of A Coil Through Which Current Passes and OnDocument9 pagesRelay: Relay Is Basically A Magnetism Based Switch. It Consists of A Coil Through Which Current Passes and OnAnonymous v5QjDW2eHxNo ratings yet
- Lecture Three: Engineering Drawing & Design (EDRD101)Document19 pagesLecture Three: Engineering Drawing & Design (EDRD101)Makhosonke MkhonzaNo ratings yet
- Numerical RelayDocument19 pagesNumerical RelayRajesh Naik Dharavath100% (1)
- Electro Mechanical RelayDocument30 pagesElectro Mechanical RelayJaydip Fadadu100% (1)
- #All About RelayDocument10 pages#All About RelayRitika JainNo ratings yet
- Experiment 1 Nitesh Hatankar (I-48) Title: Objective: AbstractDocument5 pagesExperiment 1 Nitesh Hatankar (I-48) Title: Objective: AbstractKkNo ratings yet
- Hardware CircuitryDocument22 pagesHardware CircuitryMahesh NeelarapuNo ratings yet
- Industrial Electronics Motor ControlsDocument65 pagesIndustrial Electronics Motor ControlsOnofre Algara Jr.No ratings yet
- Relay Working PrincipleDocument8 pagesRelay Working PrinciplePoornachandar7No ratings yet
- Guide To RelaysDocument5 pagesGuide To RelaysAbhinandan SharmaNo ratings yet
- Relay: Prepared By: Engr. Irish Jasmine C. Morales, RmeDocument17 pagesRelay: Prepared By: Engr. Irish Jasmine C. Morales, Rmegame masterNo ratings yet
- Em RelaysDocument24 pagesEm RelaysgokulchandruNo ratings yet
- Three Phase Appliance ProtectorDocument40 pagesThree Phase Appliance ProtectorJeevan PreethuNo ratings yet
- RelayDocument11 pagesRelayKishan PatelNo ratings yet
- Electromechanical RelayDocument40 pagesElectromechanical RelayPrabir Kumar Pati100% (2)
- Relay: Navigation SearchDocument14 pagesRelay: Navigation SearchAbhishek ChakrabortyNo ratings yet
- Relay DetailsDocument15 pagesRelay DetailsstarNo ratings yet
- Whats Is A Relay?Document13 pagesWhats Is A Relay?John Carlo PadillaNo ratings yet
- The Electromechanical RelayDocument17 pagesThe Electromechanical Relaytata lorenNo ratings yet
- Coil of Wire Surrounding A Soft Iron CoreDocument15 pagesCoil of Wire Surrounding A Soft Iron Coreprem035No ratings yet
- Actuators: Electromagnetic RelayDocument19 pagesActuators: Electromagnetic Relaymanjunath100% (1)
- RelayDocument10 pagesRelayhighview1738No ratings yet
- Basic Design and Operation: RelayDocument5 pagesBasic Design and Operation: RelaysweetsureshNo ratings yet
- Buy Products Send-In Repair On-Site Repair Engineered Systems Galco TV My AccountDocument8 pagesBuy Products Send-In Repair On-Site Repair Engineered Systems Galco TV My AccountTanveer Ul HaqNo ratings yet
- What Is A RelayDocument8 pagesWhat Is A RelayRasheed ShahNo ratings yet
- U1A1 Relays.Document10 pagesU1A1 Relays.JESUS ALBERTO SANCHEZ GUTIERREZNo ratings yet
- Electrically Switch ElectromagnetDocument16 pagesElectrically Switch ElectromagnetThamarai Kannan RamajayamNo ratings yet
- Relay - What Is A Relay?Document17 pagesRelay - What Is A Relay?Khalid MahmudNo ratings yet
- Different Types of Relays and Their Working Principles: A Relay Is A Switching DeviceDocument17 pagesDifferent Types of Relays and Their Working Principles: A Relay Is A Switching DeviceVIPIN KUMARNo ratings yet
- Relay Working Principle Operatin of Normal Relay Transistor Driving Ckircuit Realy Interfacig With Micro Controller RelaysDocument8 pagesRelay Working Principle Operatin of Normal Relay Transistor Driving Ckircuit Realy Interfacig With Micro Controller RelaysGirija VaniNo ratings yet
- Simple Electromechanical RelayDocument11 pagesSimple Electromechanical RelayKevin FernandezNo ratings yet
- Basic Design and Operation: Electrically SwitchDocument11 pagesBasic Design and Operation: Electrically SwitchAnina JacobNo ratings yet
- Relays: Switches DiodesDocument23 pagesRelays: Switches DiodesVijay Kishore Reddy RNo ratings yet
- RelayDocument7 pagesRelayAdib Abyan NugrohoNo ratings yet
- Relays: TransistorDocument12 pagesRelays: TransistorvgmanjunathaNo ratings yet
- DPT 2Document15 pagesDPT 2shadman souravNo ratings yet
- Relays: Dec 4, 2020 Thrustmit TP Nilabha Das AvionicsDocument4 pagesRelays: Dec 4, 2020 Thrustmit TP Nilabha Das AvionicsNilabha DasNo ratings yet
- Introduction To Solid State Relays and The Advantages and DisadvantagesDocument3 pagesIntroduction To Solid State Relays and The Advantages and DisadvantagesKen Dela CernaNo ratings yet
- How Does A Relay WorkDocument7 pagesHow Does A Relay WorkjackNo ratings yet
- Relay: Fig 6.1: Automotive-Style Miniature Relay, Dust Cover Is Taken OffDocument12 pagesRelay: Fig 6.1: Automotive-Style Miniature Relay, Dust Cover Is Taken OffmichealNo ratings yet
- Power System Protection (Control System) : Protective RelaysDocument29 pagesPower System Protection (Control System) : Protective RelaysBagirath SwaminathanNo ratings yet
- Relays: Dec 4, 2020 Manas TP Nilabha Das Sensing and AutomationDocument4 pagesRelays: Dec 4, 2020 Manas TP Nilabha Das Sensing and AutomationNilabha DasNo ratings yet
- Different Types of Relays and Their Working PrinciplesDocument5 pagesDifferent Types of Relays and Their Working PrinciplesArslan AliNo ratings yet
- Bee053 P&S NotesDocument60 pagesBee053 P&S NotesADDIS JOHNNo ratings yet
- Electricity RelayDocument21 pagesElectricity RelaypraneethNo ratings yet
- What Is RelayDocument8 pagesWhat Is RelayLorenz BanadaNo ratings yet
- Electrically Switch Electromagnet Solid-State RelaysDocument4 pagesElectrically Switch Electromagnet Solid-State RelaysOMSURYACHANDRANNo ratings yet
- Robotic: Differential Motion and JacobianDocument37 pagesRobotic: Differential Motion and Jacobian李尚倫33% (3)
- Lab Assignment: 01 Vectors and Vector Operations: Part A: Triangle - Open The Vector SimulationDocument7 pagesLab Assignment: 01 Vectors and Vector Operations: Part A: Triangle - Open The Vector SimulationRahik IhttipasNo ratings yet
- 2019 Iran PPRDocument10 pages2019 Iran PPRFareena FatimaNo ratings yet
- Total Non-Basic Charges:: (Cite Your Source Here.)Document1 pageTotal Non-Basic Charges:: (Cite Your Source Here.)osman taşNo ratings yet
- Free Short Term Memory Test - MemoryHealthCheckDocument1 pageFree Short Term Memory Test - MemoryHealthCheckMarco GonzalezNo ratings yet
- Chapter 5Document22 pagesChapter 5Aftab AhmedNo ratings yet
- Essays of Mice and MenDocument7 pagesEssays of Mice and Menafibzfwdkaesyf100% (2)
- Guide Isolators 2017Document180 pagesGuide Isolators 2017GhiloufiNo ratings yet
- Wireless Home Automated SystemDocument13 pagesWireless Home Automated SystemKassandra CanaNo ratings yet
- Data Sheet Tiristor s701c15n3sDocument8 pagesData Sheet Tiristor s701c15n3sLeo SalgadoNo ratings yet
- Unit 1: Energy and Motion: Chapter 5: Work and Machines 5.1: 5.2Document78 pagesUnit 1: Energy and Motion: Chapter 5: Work and Machines 5.1: 5.2Tomboy ReginaNo ratings yet
- Nama Cat & Harga (Material)Document6 pagesNama Cat & Harga (Material)Fatmaasmarani farhanNo ratings yet
- ASTM A-967-13 Pasivado Inoxidable PDFDocument7 pagesASTM A-967-13 Pasivado Inoxidable PDFmagierezNo ratings yet
- Activity 3 - MINITASK - CapacitorDocument13 pagesActivity 3 - MINITASK - CapacitorEssi Marie FelicianoNo ratings yet
- InteliGen 200 Datasheet r8Document4 pagesInteliGen 200 Datasheet r8Ramanathpura Venkannachar KiranNo ratings yet
- Egipto Underweight Case Study MNT1Document14 pagesEgipto Underweight Case Study MNT1Hyacinth M. NotarteNo ratings yet
- How Stress Affects Your Brain: Madhumita Murgia - TED-EdDocument4 pagesHow Stress Affects Your Brain: Madhumita Murgia - TED-EdQueency Tabora-MacalindongNo ratings yet
- Activity Sheet EnglishDocument17 pagesActivity Sheet EnglishELAINE ARCANGELNo ratings yet
- Notes:-All Dimension Are in MM.: Investa Pumps Pvt. LTDDocument1 pageNotes:-All Dimension Are in MM.: Investa Pumps Pvt. LTDJairzhino EspinozaNo ratings yet
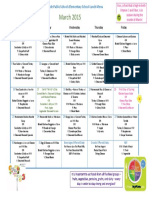
- Seaside Elementary School Lunch Menu LewisDocument1 pageSeaside Elementary School Lunch Menu Lewisapi-345910065No ratings yet
- Snoo Wilson Adaptation of The BedbugDocument49 pagesSnoo Wilson Adaptation of The BedbugMike Vanden HeuvelNo ratings yet
- EMD Tools1Document55 pagesEMD Tools1Vladimir ArsicNo ratings yet
- Timing Advance UnitDocument9 pagesTiming Advance UnitShohan Taylor50% (2)
- 0748640843Document273 pages0748640843Zia Ullah100% (1)
- BUAD 680 Group1 Final Project Marketing Audit TeslaDocument26 pagesBUAD 680 Group1 Final Project Marketing Audit TeslaAkaash HegdeNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument12 pagesCambridge International Advanced Subsidiary and Advanced LevelTerTalks ChikweyaNo ratings yet
- The First Two Years of Operational Experience With The Sikorsky S-61Document6 pagesThe First Two Years of Operational Experience With The Sikorsky S-61Floyd PriceNo ratings yet
- Pharmacognosy (Effective From The Session - 2016-17)Document16 pagesPharmacognosy (Effective From The Session - 2016-17)fadli_nugraha6109No ratings yet
- 203 826 2 PBDocument15 pages203 826 2 PBTWW100% (1)
- BuffersDocument3 pagesBuffersIshak Ika Kovac100% (1)