You might also like
- Spatial Filters in Image ProcessingDocument68 pagesSpatial Filters in Image ProcessingMudassir RafiqNo ratings yet
- Catalogo Medidor gREXDocument2 pagesCatalogo Medidor gREXolguita22No ratings yet
- Bibliografie TehniumDocument49 pagesBibliografie TehniumGeorge MucutaNo ratings yet
- Welding Procedure Specification (WPS) FormDocument2 pagesWelding Procedure Specification (WPS) FormEarl Harbert0% (2)
- Digital Image Processing: Lecture 8 and 9Document34 pagesDigital Image Processing: Lecture 8 and 9nnehasinghNo ratings yet
- Fundamentals of Spatial Filtering: Outline of The LectureDocument6 pagesFundamentals of Spatial Filtering: Outline of The LectureSyedaNo ratings yet
- Chapter 3 - Bien Doi Anh Trong Mien Khong GianDocument38 pagesChapter 3 - Bien Doi Anh Trong Mien Khong GianHải vlogNo ratings yet
- Image Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallDocument72 pagesImage Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallBEN AMARNo ratings yet
- Dip Spatial FilteringDocument32 pagesDip Spatial FilteringMadhuri PotluriNo ratings yet
- Image Acquisition andDocument27 pagesImage Acquisition andAmit SinghNo ratings yet
- Week No 11 SpatialFilteringDocument34 pagesWeek No 11 SpatialFilteringRubinaNo ratings yet
- Digital Image Processing: Lecture 9 and 10Document35 pagesDigital Image Processing: Lecture 9 and 10nnehasinghNo ratings yet
- Spatial Filt+Frequency DomaingDocument6 pagesSpatial Filt+Frequency DomaingSankalp_Kallakur_402No ratings yet
- Convolution and CorrelationDocument11 pagesConvolution and CorrelationG.AdithiyaNo ratings yet
- DIP LectureDocument35 pagesDIP Lecturemajdiyjalalm2No ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Monte Carlo Simulation-ProjectDocument33 pagesMonte Carlo Simulation-ProjectYulizar WidiatamaNo ratings yet
- n-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityDocument7 pagesn-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityArun EceNo ratings yet
- Spatial FilteringDocument51 pagesSpatial FilteringDeep MistryNo ratings yet
- Dip 06 55Document55 pagesDip 06 55dogedogedogedoge42No ratings yet
- Spatial FilteringDocument52 pagesSpatial FilteringAnonymous 0L2mVaINo ratings yet
- CE304-Unit 5-Lect1-Jumah2018Document10 pagesCE304-Unit 5-Lect1-Jumah2018محمد بركاتNo ratings yet
- Calculus Ich 15Document22 pagesCalculus Ich 15nqnghia22No ratings yet
- Digital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image ProcessingDocument33 pagesDigital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image Processingsrinivas CVNo ratings yet
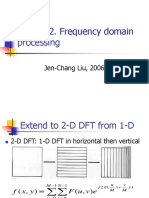
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Week 5Document31 pagesWeek 5Shehabeldeen Hesham Mahmoud AbdelmoatyNo ratings yet
- Image Enhancement IIDocument78 pagesImage Enhancement IIHIMANI NARAIN HIMANI NARAINNo ratings yet
- Interpolation by Newtons Divided MethodDocument11 pagesInterpolation by Newtons Divided Methodtahiruabdulrahmanbaaba3No ratings yet
- C41 - Integrals - Part 1Document45 pagesC41 - Integrals - Part 1Triet TruongNo ratings yet
- Image SegmentationDocument40 pagesImage SegmentationArga Bz1No ratings yet
- 2 Aip 2019Document6 pages2 Aip 2019STAN MARIANo ratings yet
- Image EnhancementDocument84 pagesImage Enhancementyogini choudharyNo ratings yet
- 5-SpatialFiltering 2Document74 pages5-SpatialFiltering 2pham tamNo ratings yet
- Math 1102-Ch-3-Lecture Note Fourier SeriesDocument13 pagesMath 1102-Ch-3-Lecture Note Fourier SeriesKhant Si ThuNo ratings yet
- Chapter 2Document16 pagesChapter 2eng.rayan1996No ratings yet
- L17 - Mask Processing - 1Document37 pagesL17 - Mask Processing - 1ramadeviNo ratings yet
- Feature Extraction Gabor FiltersDocument2 pagesFeature Extraction Gabor FiltersZeeshan AslamNo ratings yet
- Acta Mathematica Academiae Paedagogicae Ny Iregyh AziensisDocument6 pagesActa Mathematica Academiae Paedagogicae Ny Iregyh AziensisVe LopiNo ratings yet
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDocument49 pagesEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarNo ratings yet
- Line and Surface IntegralsDocument38 pagesLine and Surface IntegralsDinh LâmNo ratings yet
- Digital Image ProcessingDocument27 pagesDigital Image Processingainugiri91% (11)
- 91lecture3 SSModelDocument49 pages91lecture3 SSModelzoom meetingNo ratings yet
- Image Processing: Gaurav GuptaDocument38 pagesImage Processing: Gaurav GuptaSnehal ChotheNo ratings yet
- Digital Image ProcessingDocument24 pagesDigital Image Processingkainsu12100% (1)
- Fourier Transform IDocument33 pagesFourier Transform Iarkar myintNo ratings yet
- Intensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3Document25 pagesIntensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3Snehal ChotheNo ratings yet
- DIP Question BankDocument9 pagesDIP Question Bankapi-3772517No ratings yet
- Numerical Analysis: Prof. Dr. Süheyla ÇEHRELİDocument11 pagesNumerical Analysis: Prof. Dr. Süheyla ÇEHRELİEzgi GeyikNo ratings yet
- L51-Vector Fields and Line IntegralsDocument37 pagesL51-Vector Fields and Line IntegralsQuynh-AnhNo ratings yet
- Lecture-13 - ESO208 - Aug 31 - 2022Document28 pagesLecture-13 - ESO208 - Aug 31 - 2022Imad ShaikhNo ratings yet
- Advance Mathematics 1Document6 pagesAdvance Mathematics 1Tim PicarNo ratings yet
- Image Processing: Gaurav GuptaDocument38 pagesImage Processing: Gaurav GuptaanithaNo ratings yet
- Galerkin MethodDocument29 pagesGalerkin MethodjgyxddhNo ratings yet
- Lecture 6: More Matlab Functions, Transformations: Professor Erik Cheever Course Web PageDocument26 pagesLecture 6: More Matlab Functions, Transformations: Professor Erik Cheever Course Web PageAldo RodNo ratings yet
- Topic#7 State Space Analysis and DesignDocument56 pagesTopic#7 State Space Analysis and DesignAhmed ShafeekNo ratings yet
- Image Filtering in Spatial DomainDocument36 pagesImage Filtering in Spatial DomainRafiq MuzakkiNo ratings yet
- Point Operations and Spatial FilteringDocument22 pagesPoint Operations and Spatial FilteringAnonymous Tph9x741No ratings yet
- Lect 4Document38 pagesLect 4Alamgir khanNo ratings yet
- Image Enhancement in The Spatial DomainDocument8 pagesImage Enhancement in The Spatial DomainDevendra Pratap 2K21/PHDEC/26No ratings yet
- Phase Plane Method: Presents byDocument25 pagesPhase Plane Method: Presents byMona AliNo ratings yet
- Image SegmentationDocument20 pagesImage SegmentationGirish RajuNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- FlexiROC D65 Sales BrochureDocument8 pagesFlexiROC D65 Sales BrochureEduardo Jimenez50% (2)
- Photosynthesis and RespirationDocument7 pagesPhotosynthesis and RespirationSofia Romero ReyNo ratings yet
- HistotechniquesDocument9 pagesHistotechniquesDivineGloryMalbuyoNo ratings yet
- A Brief Analytical Note On The Provisional Population Tptals of Census 2011 For Rajasthan 2011Document49 pagesA Brief Analytical Note On The Provisional Population Tptals of Census 2011 For Rajasthan 2011Jitendra SinghNo ratings yet
- Chemical Equations2Document28 pagesChemical Equations2Saleem BashaNo ratings yet
- Abstracts 8th Congress CSMBLM Rijeka Korekcija N.nikolac 5.11.2015. BO2Document101 pagesAbstracts 8th Congress CSMBLM Rijeka Korekcija N.nikolac 5.11.2015. BO2BoyITBNo ratings yet
- CNC Programming Tutorials Examples G and M Codes by Thanh TranDocument151 pagesCNC Programming Tutorials Examples G and M Codes by Thanh TranBerkan KılıçNo ratings yet
- Expanding The Data Capacity of QR Codes Using Multiple Compression Algorithms and Base64 Encode/DecodeDocument7 pagesExpanding The Data Capacity of QR Codes Using Multiple Compression Algorithms and Base64 Encode/DecodeLabodedexterNo ratings yet
- Application Programming ACR122UDocument47 pagesApplication Programming ACR122UAndra SenangNo ratings yet
- DBMS AssignmentDocument3 pagesDBMS AssignmentAkankshaNo ratings yet
- 7 Crystal SystemDocument7 pages7 Crystal SystemAnjum Ansh KhanNo ratings yet
- Standard Requisition For PurchaseDocument9 pagesStandard Requisition For Purchasejennifer L. TUtorNo ratings yet
- MCQ in Differential Calculus MaximaMinima and Time Rates Part 1 AnswersDocument5 pagesMCQ in Differential Calculus MaximaMinima and Time Rates Part 1 AnswersxXx uuNo ratings yet
- Quantum Optics Notes PDFDocument932 pagesQuantum Optics Notes PDFYehan Liu100% (1)
- U900 Vs U2100Document3 pagesU900 Vs U2100Muhammad RizkiNo ratings yet
- NIOSH Lifting Equation (Single Task Analysis) : Step-by-Step GuideDocument16 pagesNIOSH Lifting Equation (Single Task Analysis) : Step-by-Step Guidebudi utomoNo ratings yet
- Prune Days and Change Capture in Data Warehouse Application Console (DAC)Document3 pagesPrune Days and Change Capture in Data Warehouse Application Console (DAC)nelrick1984100% (2)
- Productattachments Files CH 6 Chemical Bonding 1Document32 pagesProductattachments Files CH 6 Chemical Bonding 1Song LyricsNo ratings yet
- Holography (3-D Images)Document17 pagesHolography (3-D Images)Ifra RubabNo ratings yet
- Space and Shape: Student BookDocument40 pagesSpace and Shape: Student BookBiljana VukovicNo ratings yet
- Design and Fabrication of Milk Churner Final ProjectDocument17 pagesDesign and Fabrication of Milk Churner Final ProjectIbrahim Abdu100% (1)
- Pawn Endings Part 1Document4 pagesPawn Endings Part 1Snhs Sps100% (1)
- Building A Classroom CommunityDocument4 pagesBuilding A Classroom Communityapi-459173295No ratings yet
- Panasonic Kx-tg2361 SMDocument40 pagesPanasonic Kx-tg2361 SMReza AranNo ratings yet
- Cat Detect Proximity Awareness For MineStar Onboard PDFDocument46 pagesCat Detect Proximity Awareness For MineStar Onboard PDFИгорь ИвановNo ratings yet
- Ways of Are According State A Gas, Solid) and Composition An Element, Compound, orDocument6 pagesWays of Are According State A Gas, Solid) and Composition An Element, Compound, orrbytesNo ratings yet
- Hybrid Electric Propulsion For Military VehiclesDocument84 pagesHybrid Electric Propulsion For Military VehiclesObject477No ratings yet