You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Siemens Mechatronic Systems Certification Program: Test QuestionsDocument22 pagesSiemens Mechatronic Systems Certification Program: Test QuestionsIsaac Gisore100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Adding Scales To Narex Marking Knife Blank 2Document6 pagesAdding Scales To Narex Marking Knife Blank 2Mal100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ADLC Science 8 - Mechanical Systems PDFDocument42 pagesADLC Science 8 - Mechanical Systems PDFLizaNo ratings yet
- Ffe Lsa 30 July 09Document1 pageFfe Lsa 30 July 09Drago DragicNo ratings yet
- Breakdown of Solid Dielectrics in PracticeDocument17 pagesBreakdown of Solid Dielectrics in PracticeSumaira SaifNo ratings yet
- 2017-GCWUF-3350 SUMAIRA SAIF (Roll# 189) Final Assignment (1) Inorganic ChemistDocument5 pages2017-GCWUF-3350 SUMAIRA SAIF (Roll# 189) Final Assignment (1) Inorganic ChemistSumaira SaifNo ratings yet
- He University of Faisalabad: Hassan - Raza@tuf - Edu.pkDocument4 pagesHe University of Faisalabad: Hassan - Raza@tuf - Edu.pkSumaira SaifNo ratings yet
- He University of Faisalabad: Hassan - Razatuf.edu - PKDocument4 pagesHe University of Faisalabad: Hassan - Razatuf.edu - PKSumaira SaifNo ratings yet
- Measurement of High D.C., A.C. and Impulse CurrentsDocument18 pagesMeasurement of High D.C., A.C. and Impulse CurrentsSumaira SaifNo ratings yet
- Conduction and Breakdown in Pure & Commercial LiquidsDocument10 pagesConduction and Breakdown in Pure & Commercial LiquidsSumaira SaifNo ratings yet
- Generation of High D.C. Voltages & AC VoltagesDocument14 pagesGeneration of High D.C. Voltages & AC VoltagesSumaira SaifNo ratings yet
- Unit-Iv - Ac-Measurements & Measurement of High D.C., A.C. and Impulse CurrentsDocument39 pagesUnit-Iv - Ac-Measurements & Measurement of High D.C., A.C. and Impulse CurrentsSumaira SaifNo ratings yet
- Measurement of High A.C. and Impulse VoltagesDocument24 pagesMeasurement of High A.C. and Impulse VoltagesSumaira SaifNo ratings yet
- The University of Faisalabad: Department of Electrical Engineering TechnologyDocument44 pagesThe University of Faisalabad: Department of Electrical Engineering TechnologySumaira SaifNo ratings yet
- Measurement of DC High VoltagesDocument14 pagesMeasurement of DC High VoltagesSumaira SaifNo ratings yet
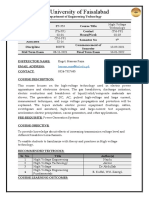
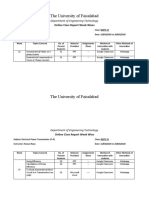
- The University of Faisalabad: Department of Engineering TechnologyDocument12 pagesThe University of Faisalabad: Department of Engineering TechnologySumaira SaifNo ratings yet
- Breakdown in Composite DielectricDocument15 pagesBreakdown in Composite DielectricSumaira SaifNo ratings yet
- Energy MeterDocument42 pagesEnergy MeterSumaira SaifNo ratings yet
- The University of Faisalabad: Department of Electrical Engineering TechnologyDocument31 pagesThe University of Faisalabad: Department of Electrical Engineering TechnologySumaira SaifNo ratings yet
- Measurement of DC High VoltagesDocument16 pagesMeasurement of DC High VoltagesSumaira SaifNo ratings yet
- ThesisDocument54 pagesThesisSumaira SaifNo ratings yet
- Door LockDocument39 pagesDoor LockSumaira Saif100% (1)
- FYP Report MDocument33 pagesFYP Report MSumaira SaifNo ratings yet
- FYP Report Lock SystemDocument32 pagesFYP Report Lock SystemSumaira SaifNo ratings yet
- Forman Christian College A Chartered University: Furqan Alee 14-10239Document33 pagesForman Christian College A Chartered University: Furqan Alee 14-10239Sumaira SaifNo ratings yet
- Internal Voltages of Loaded Machines Under Transient ConditionsDocument6 pagesInternal Voltages of Loaded Machines Under Transient ConditionsSumaira SaifNo ratings yet
- Ethical and Unethical Leadership Issues, Cases, and Dilemmas With Case StudiesDocument8 pagesEthical and Unethical Leadership Issues, Cases, and Dilemmas With Case StudiesSumaira SaifNo ratings yet
- Induction GeneratorDocument12 pagesInduction GeneratorSumaira SaifNo ratings yet
- Internship Report Feroze PDF FreeDocument29 pagesInternship Report Feroze PDF FreeSumaira SaifNo ratings yet
- Basic Induction Motors ConceptDocument16 pagesBasic Induction Motors ConceptSumaira SaifNo ratings yet
- Construction of Synchronous GeneratorDocument10 pagesConstruction of Synchronous GeneratorSumaira Saif100% (1)
- Equivalent Circuit and Phasor Diagrams of Synchronous GeneratorDocument10 pagesEquivalent Circuit and Phasor Diagrams of Synchronous GeneratorSumaira SaifNo ratings yet
- Induced Voltages in AC Machines.Document6 pagesInduced Voltages in AC Machines.Sumaira SaifNo ratings yet
- Equipment ListDocument70 pagesEquipment ListOm Prakash ChouhanNo ratings yet
- Earth Leakage Relay (RCD-V30) PDFDocument2 pagesEarth Leakage Relay (RCD-V30) PDFDEADMAN100% (1)
- Camera Ngoai Troi Hong NgoaiDocument3 pagesCamera Ngoai Troi Hong NgoaiLa HanNo ratings yet
- HIgh Energy Igniter Tips Specialty Line PDFDocument1 pageHIgh Energy Igniter Tips Specialty Line PDFSudar MyshaNo ratings yet
- Komatsu HydraulicsDocument50 pagesKomatsu HydraulicsMartin FloresNo ratings yet
- EPX-Series Service Manual Rev.EDocument97 pagesEPX-Series Service Manual Rev.ERobson QuinagliaNo ratings yet
- SCM 71, 80, 100Document3 pagesSCM 71, 80, 100Nguyen Anh HungNo ratings yet
- Automotive Parts - Browse All Aftermarket & Genuine PartsDocument18 pagesAutomotive Parts - Browse All Aftermarket & Genuine PartsElisha WankogereNo ratings yet
- 2GCS202082A0030-CLMD03 ManualDocument24 pages2GCS202082A0030-CLMD03 Manualantera88No ratings yet
- Weflow F6001Document1 pageWeflow F6001residente electricistaNo ratings yet
- Iso13485 and Iso 9001Document2 pagesIso13485 and Iso 9001birbalkumar653No ratings yet
- Specifications Cassette Type ON OFFDocument2 pagesSpecifications Cassette Type ON OFFRavi SoondurNo ratings yet
- Iron Core Motors ManualDocument69 pagesIron Core Motors ManualLuciano MoraisNo ratings yet
- ME 473 Unit 5Document21 pagesME 473 Unit 5Ama Serwaa YeboahNo ratings yet
- 7215 IR ViewerDocument2 pages7215 IR ViewerSckajalaNo ratings yet
- LVMV Online2Document60 pagesLVMV Online2Hamed GeramiNo ratings yet
- NPL-522 A1.2.0 EnglishDocument234 pagesNPL-522 A1.2.0 EnglishRafael Soares GouveiaNo ratings yet
- GG AmDocument12 pagesGG AmBranka MilutinovicNo ratings yet
- RSL 3012Document3 pagesRSL 3012muhammad azarudinNo ratings yet
- Catalogo TecnoliteDocument149 pagesCatalogo TecnoliteLeonardo AcostaNo ratings yet
- RB/FT Intake Manifold Pressure Sensor: VHP Remedy #4Document2 pagesRB/FT Intake Manifold Pressure Sensor: VHP Remedy #4surya powerNo ratings yet
- Assignment Reflection NumericalsDocument2 pagesAssignment Reflection NumericalsRavinder Pal SinghNo ratings yet
- Working Load Limits For SlingsDocument11 pagesWorking Load Limits For Slingstolis-gefNo ratings yet
- Energence 3 6 EhDocument64 pagesEnergence 3 6 EhRaul CorreaNo ratings yet
- LED VU Meter Circuits Using Transistors 5 To 20 40 LEDDocument11 pagesLED VU Meter Circuits Using Transistors 5 To 20 40 LEDsameeratoNo ratings yet
- QCS 2014 - 3.7 Roller Shutter FIre DoorsDocument3 pagesQCS 2014 - 3.7 Roller Shutter FIre DoorsthomsonNo ratings yet