You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- CH 2Document6 pagesCH 2Amanda HoustonNo ratings yet
- Chapter 3Document23 pagesChapter 3Elias KhouryNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- 13-Push Down Automata (PDA)Document24 pages13-Push Down Automata (PDA)jahnavi poluruNo ratings yet
- Solutions - MidTerm ExamsDocument9 pagesSolutions - MidTerm ExamsAdmiral kabmanNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Pushdown Automata-PDA: Prof. (DR.) K.R. ChowdharyDocument7 pagesPushdown Automata-PDA: Prof. (DR.) K.R. Chowdharyhaine12345No ratings yet
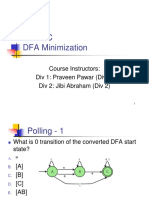
- L9-DFA MinimizationDocument29 pagesL9-DFA MinimizationSanket KhaireNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Assignment 1 - Automata, Languages, and ComputabilityDocument12 pagesAssignment 1 - Automata, Languages, and ComputabilityMallikarjun KanakaboinaNo ratings yet
- CFG To PDA and Two Stack PDADocument5 pagesCFG To PDA and Two Stack PDAhod csNo ratings yet
- formal_hw1Document2 pagesformal_hw1ayyagmur.ozdemirNo ratings yet
- AutomataDocument102 pagesAutomatakirivarnan88% (8)
- FLAT - Ch-2Document50 pagesFLAT - Ch-2Biruk MesfinNo ratings yet
- Bca (CS-73)Document5 pagesBca (CS-73)devindersingh2002No ratings yet
- Formal Languages & Finite Theory of Automata: BS CourseDocument26 pagesFormal Languages & Finite Theory of Automata: BS CourseAsim RazaNo ratings yet
- L8 Epsilon NFA toDFADocument11 pagesL8 Epsilon NFA toDFASanket KhaireNo ratings yet
- MT 24010315130077Document3 pagesMT 24010315130077Evan FlobertNo ratings yet
- NFA to DFA ConversionDocument56 pagesNFA to DFA ConversionMahnoor KhandwaniNo ratings yet
- Ekuivalensi NFA Dengan E Mode Ke NFA Tanpa E MoveDocument18 pagesEkuivalensi NFA Dengan E Mode Ke NFA Tanpa E MoveVicky Yuma PatimbangiNo ratings yet
- Module 1 - PART 2Document63 pagesModule 1 - PART 2Hema ReddyNo ratings yet
- Chapter 2-2 - NFADocument13 pagesChapter 2-2 - NFAtamerkobba12No ratings yet
- Topic Included in PDFDocument34 pagesTopic Included in PDFPrince Chandra singhNo ratings yet
- Designing Finite Automata ExamplesDocument15 pagesDesigning Finite Automata ExamplesSamNo ratings yet
- Push Down AutomataDocument33 pagesPush Down AutomataMithun SudheendranNo ratings yet
- HW 1 Q10Document2 pagesHW 1 Q10dubaleNo ratings yet
- Epsilon NFA Into NFA Into DFADocument18 pagesEpsilon NFA Into NFA Into DFAAlanNo ratings yet
- CS341 DFA Homework SolutionsDocument8 pagesCS341 DFA Homework SolutionsShakeel BhattiNo ratings yet
- Homework 2 Solutions: A B A B BDocument8 pagesHomework 2 Solutions: A B A B BShakeel BhattiNo ratings yet
- TOC Assignment 3Document2 pagesTOC Assignment 3vyomiskingNo ratings yet
- Module 4Document55 pagesModule 4indrajvyadavNo ratings yet
- Tut-3 SolutionsDocument3 pagesTut-3 SolutionsChirag ahjdasNo ratings yet
- Agapor, Rionel Anakin BSCS B2020 - Ass#2Document5 pagesAgapor, Rionel Anakin BSCS B2020 - Ass#2Kingina MoNo ratings yet
- Homework 2 Solutions: A B A B BDocument5 pagesHomework 2 Solutions: A B A B BJohnnyNo ratings yet
- CS341 HomeworkSol PDFDocument5 pagesCS341 HomeworkSol PDFJohnnyNo ratings yet
- Homework 2 Solutions: A B A B BDocument5 pagesHomework 2 Solutions: A B A B BTamiru FelekeNo ratings yet
- Homework 2 Solutions: A B A B BDocument5 pagesHomework 2 Solutions: A B A B BMohamed SabryNo ratings yet
- Dypu Ce Se Tcs Week2Document96 pagesDypu Ce Se Tcs Week2Saraunsh JadhavNo ratings yet
- Chapter Four NFA to DFA ConversionDocument42 pagesChapter Four NFA to DFA ConversionEbisa KebedeNo ratings yet
- TOC Minor 2Document1 pageTOC Minor 2NidhiNo ratings yet
- Formal Languages, Automata and ComputabilityDocument37 pagesFormal Languages, Automata and ComputabilityMahnoor KhandwaniNo ratings yet
- Hwsoln 02Document8 pagesHwsoln 02Miraculous MiracleNo ratings yet
- Deterministic Finite Automata (DFA) : Md. Rafsan Jani Assistant Professor Department of CSE Jahangirnagar UniversityDocument56 pagesDeterministic Finite Automata (DFA) : Md. Rafsan Jani Assistant Professor Department of CSE Jahangirnagar Universitytom jerryNo ratings yet
- Lec 07 QuicksortDocument15 pagesLec 07 Quicksortcoco finaNo ratings yet
- Lec Week 2 - NFADocument13 pagesLec Week 2 - NFAAgha KazimNo ratings yet
- Chapter 2 - DFADocument13 pagesChapter 2 - DFAtamerkobba12No ratings yet
- Another Act Because Why NotDocument3 pagesAnother Act Because Why NotunggoypatotoyNo ratings yet
- Finite Automata and Formal Language (19CS3501) : Department of Computer ScienceDocument37 pagesFinite Automata and Formal Language (19CS3501) : Department of Computer ScienceNarmatha ThiyagarajanNo ratings yet
- Theory of Computation: SathyabamaDocument47 pagesTheory of Computation: Sathyabamass sriNo ratings yet
- ATC Class Work Finite Automata Book by Padma ReddyDocument18 pagesATC Class Work Finite Automata Book by Padma ReddyGreg AnthonyNo ratings yet
- Lecture Three: Finite Automata: Amjad AliDocument26 pagesLecture Three: Finite Automata: Amjad Ali92azeem161No ratings yet
- Extension of Beta FunctionDocument6 pagesExtension of Beta FunctionHaroon RashidNo ratings yet
- 05 Finite AutomataDocument89 pages05 Finite Automatamshareem.bscsses21No ratings yet
- The Theory of Computation Part IIDocument113 pagesThe Theory of Computation Part IImjn0107No ratings yet
- Convert NFA to DFADocument7 pagesConvert NFA to DFASindhu PNo ratings yet
- Finite Automata ExamplesDocument68 pagesFinite Automata Examplesmartadi PutraNo ratings yet
- Basic Proof TechniquesDocument6 pagesBasic Proof TechniquesGagay Villamor CañeteNo ratings yet
- WINSEM2021-22 CSE2013 TH VL2021220502315 Reference Material I 06-01-2022 Unit-1-Part-2Document21 pagesWINSEM2021-22 CSE2013 TH VL2021220502315 Reference Material I 06-01-2022 Unit-1-Part-2abhinandita banerjeeNo ratings yet
- WINSEM2021-22 CSE2013 TH VL2021220502315 Reference Material I 06-01-2022 Unit-1-Part-2Document21 pagesWINSEM2021-22 CSE2013 TH VL2021220502315 Reference Material I 06-01-2022 Unit-1-Part-2abhinandita banerjeeNo ratings yet
- CSE2013 - Theory of Computation: Gunavathi C Gunavathi - Cm@vit - Ac.inDocument30 pagesCSE2013 - Theory of Computation: Gunavathi C Gunavathi - Cm@vit - Ac.inabhinandita banerjeeNo ratings yet
- Name: Abhinandita Banerjee REG NO:20BCE2080 Theory Digital Assignment Data VisualizationDocument6 pagesName: Abhinandita Banerjee REG NO:20BCE2080 Theory Digital Assignment Data Visualizationabhinandita banerjeeNo ratings yet
- Algebra IiDocument2 pagesAlgebra IiFumiServi GuayaquilNo ratings yet
- Skills and Techniques in Counseling Encouraging Paraphrasing and SummarizingDocument35 pagesSkills and Techniques in Counseling Encouraging Paraphrasing and SummarizingjaycnwNo ratings yet
- 5.talisayon Chapter 3Document12 pages5.talisayon Chapter 3Jinky Marie TuliaoNo ratings yet
- KireraDocument3 pagesKireramurithiian6588No ratings yet
- Design Steel Concrete Composite StructuresDocument1 pageDesign Steel Concrete Composite StructuresDinuSkyNo ratings yet
- Time: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code: KEE302Document2 pagesTime: 3 Hours Total Marks: 100: Printed Page 1 of 2 Sub Code: KEE302AvinäshShärmaNo ratings yet
- Sketch 5351a Lo LCD Key Uno 1107Document14 pagesSketch 5351a Lo LCD Key Uno 1107nobcha aNo ratings yet
- Lesson No. 1 - Pipe Sizing HydraulicsDocument4 pagesLesson No. 1 - Pipe Sizing Hydraulicsusaid saifullahNo ratings yet
- M-2 AIS Installation Manual ContentDocument57 pagesM-2 AIS Installation Manual ContentAdi PrasetyoNo ratings yet
- Time May Not Exist - Tim Folger in DiscoverDocument3 pagesTime May Not Exist - Tim Folger in DiscoverTrevor Allen100% (5)
- Physice 2013 Unsolved Paper Outside Delhi PDFDocument7 pagesPhysice 2013 Unsolved Paper Outside Delhi PDFAbhilashaNo ratings yet
- POLE FOUNDATION ANALYSIS EXCEL TOOLDocument18 pagesPOLE FOUNDATION ANALYSIS EXCEL TOOLJosue HasbunNo ratings yet
- 18.443 MIT Stats CourseDocument139 pages18.443 MIT Stats CourseAditya JainNo ratings yet
- Sims4 App InfoDocument5 pagesSims4 App InfooltisorNo ratings yet
- SPOT X DevDocument52 pagesSPOT X DevJaoNo ratings yet
- SIKA Concrete Repair Site HandbookDocument24 pagesSIKA Concrete Repair Site HandbookkeesinvongNo ratings yet
- Simha Lagna: First House Ruled by The Planet Sun (LEO) : The 1st House Known As The Ascendant orDocument3 pagesSimha Lagna: First House Ruled by The Planet Sun (LEO) : The 1st House Known As The Ascendant orRahulshah1984No ratings yet
- Product+Catalogue+2021+New+Final PreviewDocument34 pagesProduct+Catalogue+2021+New+Final Previewsanizam79No ratings yet
- PricelistDocument2,276 pagesPricelistadilcmsNo ratings yet
- Autodesk Revit 2014 ContentDocument6 pagesAutodesk Revit 2014 ContentGatot HardiyantoNo ratings yet
- CMO Olympiad Book For Class 3Document13 pagesCMO Olympiad Book For Class 3Srividya BaiNo ratings yet
- Galvanic CorrosionDocument5 pagesGalvanic Corrosionsatheez3251No ratings yet
- ARC JMK-Research June-2021Document6 pagesARC JMK-Research June-2021Karthik SengodanNo ratings yet
- Math Lesson on Completing PatternsDocument7 pagesMath Lesson on Completing PatternsJazmyne Obra100% (1)
- An Approach To Predict The Failure of Water Mains Under Climatic VariationsDocument16 pagesAn Approach To Predict The Failure of Water Mains Under Climatic VariationsGeorge, Yonghe YuNo ratings yet
- RPH Sains DLP Y3 2018Document29 pagesRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- BG BG 202102080912862 User Manual - File (Long) BG BG-8Document1 pageBG BG 202102080912862 User Manual - File (Long) BG BG-8hofolo39No ratings yet
- Green Building by Superadobe TechnologyDocument22 pagesGreen Building by Superadobe TechnologySivaramakrishnaNalluri67% (3)
- Design of A Small Flight Control SystemDocument120 pagesDesign of A Small Flight Control SystemRuben RubenNo ratings yet
- Details of Nodal Officer - HD Officers of Other DepttDocument46 pagesDetails of Nodal Officer - HD Officers of Other DepttManoj KashyapNo ratings yet