You might also like
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Ants in The Pants!: An OverviewDocument40 pagesAnts in The Pants!: An OverviewSahil KocharNo ratings yet
- Ants in The Pants!: An OverviewDocument40 pagesAnts in The Pants!: An OverviewHardikNo ratings yet
- Using Random Numbers in Modeling and SimulationDocument48 pagesUsing Random Numbers in Modeling and SimulationCiobanu GheorgheNo ratings yet
- Profr. Rubén Machucho CadenaDocument46 pagesProfr. Rubén Machucho CadenaManuel RodriguezNo ratings yet
- Probabilistic Robot 2 101222080103 Phpapp01Document54 pagesProbabilistic Robot 2 101222080103 Phpapp01vpresenceNo ratings yet
- Particle Swarm Optimization (PSO) ExplainedDocument34 pagesParticle Swarm Optimization (PSO) Explainedgeetesh waghelaNo ratings yet
- Swarm IntelligenceDocument45 pagesSwarm IntelligenceAbdiaziz RashidiNo ratings yet
- Brain Machine Interfaces: Modeling Strategies For Neural Signal ProcessingDocument68 pagesBrain Machine Interfaces: Modeling Strategies For Neural Signal ProcessingJohn JohnuNo ratings yet
- Optimal Tuning of PID Controller For AVR System Using Modified PSODocument6 pagesOptimal Tuning of PID Controller For AVR System Using Modified PSOAnonymous PsEz5kGVaeNo ratings yet
- Pattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavDocument38 pagesPattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavRipul GhoshNo ratings yet
- Introduction To Mobile Robotics: Probabilistic Motion ModelsDocument43 pagesIntroduction To Mobile Robotics: Probabilistic Motion ModelsAhmad RamadhaniNo ratings yet
- FundamentalsDocument7 pagesFundamentalsabcNo ratings yet
- Finite Element Methods Unit 2Document84 pagesFinite Element Methods Unit 2piravi66No ratings yet
- Jesper Andreasen Local VolatilityDocument55 pagesJesper Andreasen Local VolatilityAL RAFI0% (1)
- State-Space Models For LTI SystemsDocument39 pagesState-Space Models For LTI SystemsHarshaNo ratings yet
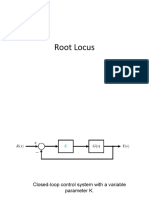
- Lecture7 RootLocusDocument97 pagesLecture7 RootLocusSchwarz ChimunhuNo ratings yet
- QuestionsDocument57 pagesQuestionsbalboinoNo ratings yet
- Genetic Algorithm Programming in MATLAB 7.0Document6 pagesGenetic Algorithm Programming in MATLAB 7.0Ananth VelmuruganNo ratings yet
- Evaluation of Bank Slopes Stability Using Random Ants Clustering AlgorithmDocument7 pagesEvaluation of Bank Slopes Stability Using Random Ants Clustering AlgorithmJames KenobiNo ratings yet
- Overview of Algorithms For Swarm Intelligence PDFDocument14 pagesOverview of Algorithms For Swarm Intelligence PDFmenguemengueNo ratings yet
- Feed-Forward Neural Networks Regressions With Genetic Algorithms - Applications in Econometrics and FinanceDocument25 pagesFeed-Forward Neural Networks Regressions With Genetic Algorithms - Applications in Econometrics and Financenwesterhuijsgmail.comNo ratings yet
- Genetic AlgorithmsDocument48 pagesGenetic AlgorithmsVaibhav PawarNo ratings yet
- Chapter 2 SummaryDocument17 pagesChapter 2 Summaryduraiprakash83No ratings yet
- MiniandgeneticDocument13 pagesMiniandgeneticapi-3854995No ratings yet
- Biomedical Signal Processing Techniques for Spectral Analysis and EEG SegmentationDocument26 pagesBiomedical Signal Processing Techniques for Spectral Analysis and EEG SegmentationSathish Narayana RaoNo ratings yet
- MCNPDocument42 pagesMCNPRuly GumilarNo ratings yet
- Drineas CMU 2012Document59 pagesDrineas CMU 2012juan perez arrikitaunNo ratings yet
- genetic algorithms optimize problemsDocument28 pagesgenetic algorithms optimize problemsjoseaguilar64No ratings yet
- Particle Swarm OptimizationDocument18 pagesParticle Swarm OptimizationChandra Shekhar PalNo ratings yet
- IIT-JAM 2020 Physics MCQ Section ADocument16 pagesIIT-JAM 2020 Physics MCQ Section AJayNo ratings yet
- Teodore Scu 2006Document6 pagesTeodore Scu 2006ashajanardhanan1996No ratings yet
- New Evolutionary Particle Swarm Algorithm (Epso) Applied To Voltage/Var ControlDocument6 pagesNew Evolutionary Particle Swarm Algorithm (Epso) Applied To Voltage/Var ControlTony HomsiNo ratings yet
- Convolutional Neural Network Case Studies: (1) Anomalies in Mortality Rates (2) Image RecognitionDocument24 pagesConvolutional Neural Network Case Studies: (1) Anomalies in Mortality Rates (2) Image Recognitionpapatest123No ratings yet
- Particle Swam OptimizationDocument34 pagesParticle Swam OptimizationtamilarasansrtNo ratings yet
- Genetic AlgorithmDocument113 pagesGenetic AlgorithmArron YewNo ratings yet
- EC7010 Robotics and AutomationDocument24 pagesEC7010 Robotics and Automationbooks sanNo ratings yet
- Modul2ver2Document16 pagesModul2ver2NatanaelNo ratings yet
- Kappa MSME PaperDocument93 pagesKappa MSME PapertimkiemnhanhNo ratings yet
- Particle Swarm OptimizationDocument54 pagesParticle Swarm Optimizationarijit_ghosh_18No ratings yet
- Stability Solutions of A Dumbbell-Like System in An Elliptical OrbitDocument8 pagesStability Solutions of A Dumbbell-Like System in An Elliptical OrbitdenilsonpauloNo ratings yet
- MPPT For Photovoltaic System Using Multi-ObjectiveDocument8 pagesMPPT For Photovoltaic System Using Multi-Objectivejasdeep_kour236066No ratings yet
- Inference On Relational Models Using Markov Chain Monte CarloDocument61 pagesInference On Relational Models Using Markov Chain Monte CarlostudentscornersNo ratings yet
- Set - 01 (7 Files Merged)Document133 pagesSet - 01 (7 Files Merged)Surya PrakashNo ratings yet
- ANA Projects ListDocument44 pagesANA Projects ListRaul GarciaNo ratings yet
- PSO and its Variants ExplainedDocument70 pagesPSO and its Variants ExplainedRifenigel Mahenka NarahawarinNo ratings yet
- 1 - L2-State Space AnalysisDocument9 pages1 - L2-State Space Analysisabbas1999n8No ratings yet
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- ReportDocument2 pagesReportRahul NKNo ratings yet
- Optimization SGADocument20 pagesOptimization SGAAudiooAliefKautsarHartamaNo ratings yet
- DSP Module 1: Introduction to Signals and SystemsDocument11 pagesDSP Module 1: Introduction to Signals and SystemsMegha SrivastavaNo ratings yet
- Probabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaDocument33 pagesProbabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaSara CMNo ratings yet
- Hybrid PSO-GMDHDocument8 pagesHybrid PSO-GMDHAnurag SharmaNo ratings yet
- Genetic Algorithms For The Traveling Salesman Problem-8Document32 pagesGenetic Algorithms For The Traveling Salesman Problem-8rafeak rafeakNo ratings yet
- An Introduction To Particle Swarm Optimization: ArticleDocument9 pagesAn Introduction To Particle Swarm Optimization: ArticleRoxana DanielaNo ratings yet
- Intellectual Approaches To Improvement of The Classification Decisions Quality On The Base of The SVM ClassifierDocument9 pagesIntellectual Approaches To Improvement of The Classification Decisions Quality On The Base of The SVM ClassifierNguyễn Quang HuyNo ratings yet
- Genetic Algorithm ConceptDocument28 pagesGenetic Algorithm ConceptNiranjan ThirNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- A General Introduction To Artificial IntelligenceDocument75 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- A General Introduction To Artificial IntelligenceDocument58 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- A General Introduction To Artificial IntelligenceDocument55 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- Introduction to AI Course SyllabusDocument58 pagesIntroduction to AI Course SyllabusÁnh PhạmNo ratings yet
- Business Process Analysis and Academic Information System Audit of Helpdesk Application Using Genetic Algorithms A Process Mining ApproachDocument7 pagesBusiness Process Analysis and Academic Information System Audit of Helpdesk Application Using Genetic Algorithms A Process Mining ApproachReynaldi Yusuf KurniawanNo ratings yet
- Prediction of Immiscible Gas Flooding Performance: A Modified Capacitance-Resistance Model and Sensitivity AnalysisDocument19 pagesPrediction of Immiscible Gas Flooding Performance: A Modified Capacitance-Resistance Model and Sensitivity AnalysisTripoli ManoNo ratings yet
- APP For Optimizing Number of Trucks For Dispatching Operation of Concrete PlantDocument3 pagesAPP For Optimizing Number of Trucks For Dispatching Operation of Concrete Plantnabajyoti deyNo ratings yet
- Erlang as an Unintentional Neural Network Programming LanguageDocument56 pagesErlang as an Unintentional Neural Network Programming Languagekoteko87No ratings yet
- Interference Management Techniques in Cellular Networks: A ReviewDocument11 pagesInterference Management Techniques in Cellular Networks: A ReviewHashimNo ratings yet
- Final Year Project GuidelinesDocument35 pagesFinal Year Project GuidelinesTes MekoNo ratings yet
- A Genetic Algorithm For Solving Travelling Salesman ProblemDocument4 pagesA Genetic Algorithm For Solving Travelling Salesman ProblemEditor IJACSANo ratings yet
- GA Based Optimal Sizing and Placement of DG for Loss MinimizationDocument7 pagesGA Based Optimal Sizing and Placement of DG for Loss MinimizationDrVikas Singh BhadoriaNo ratings yet
- Supervised Learning 1 PDFDocument162 pagesSupervised Learning 1 PDFAlexanderNo ratings yet
- Introduction - Evolutionary AlgorithmsDocument37 pagesIntroduction - Evolutionary AlgorithmsMayank furniturewalaNo ratings yet
- Thesis SomuDocument98 pagesThesis SomuPrateek PuriNo ratings yet
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmDocument1 pageOptimization Module For Abaqus/CAE Based On Genetic AlgorithmSIMULIACorpNo ratings yet
- GA-Optimized PID Speed Control for Marine Diesel EnginesDocument5 pagesGA-Optimized PID Speed Control for Marine Diesel EngineshoangductuanNo ratings yet
- Development of Web Based Timetabling SystemDocument6 pagesDevelopment of Web Based Timetabling SystemEddie Agbayani Jr.No ratings yet
- Advanced Optimization Techniques: Upon Completion of The Subject, Students Will Be Able To: 1. 2. 3. 4. - (Unit-4)Document2 pagesAdvanced Optimization Techniques: Upon Completion of The Subject, Students Will Be Able To: 1. 2. 3. 4. - (Unit-4)rajya lakshmiNo ratings yet
- 2009 - Multi-Objective Optimization Using Evolutionary AlgorithmsDocument36 pages2009 - Multi-Objective Optimization Using Evolutionary AlgorithmsFranck DernoncourtNo ratings yet
- AI Exam Questions Genetic Algorithms Simulated Annealing Ant Colony OptimizationDocument25 pagesAI Exam Questions Genetic Algorithms Simulated Annealing Ant Colony OptimizationumarsaboNo ratings yet
- Evolving Neural Networks Through Augmenting TopologiesDocument62 pagesEvolving Neural Networks Through Augmenting TopologiesLeo MauroNo ratings yet
- Automated Timetable SchedulerDocument17 pagesAutomated Timetable Schedulerkirtan patelNo ratings yet
- Cse PDFDocument201 pagesCse PDFCarey SamNo ratings yet
- A Literature Review On Efficient Plant Layout Design PDFDocument9 pagesA Literature Review On Efficient Plant Layout Design PDFKrishan KamtaNo ratings yet
- Reversal DistanceDocument5 pagesReversal Distanceviveksahu87No ratings yet
- Genetic Algorithm Traveling SalesmanDocument8 pagesGenetic Algorithm Traveling SalesmanDipak KaleNo ratings yet
- Soft ComputingDocument126 pagesSoft Computingbhuvi2312No ratings yet
- Intelligent ControlDocument43 pagesIntelligent ControlhardmanpersonNo ratings yet
- CV NSC 2011Document18 pagesCV NSC 2011nschoubeyNo ratings yet
- Mtech StructuresDocument27 pagesMtech Structuresapi-293374101No ratings yet
- Study On Behaviour of Nano ConcreteDocument6 pagesStudy On Behaviour of Nano ConcreteInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Johnson's-Rule-Based Genetic Algorithm For Two-Stage-Task Scheduling Problem in Data-Centers of Cloud ComputingDocument14 pagesA Johnson's-Rule-Based Genetic Algorithm For Two-Stage-Task Scheduling Problem in Data-Centers of Cloud ComputingkousalyaNo ratings yet
- Stability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizerDocument4 pagesStability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizererpublicationNo ratings yet