You might also like
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- BEM IntroductionDocument60 pagesBEM IntroductionpaulomarezeNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Lec 06Document78 pagesLec 06prakashNo ratings yet
- Tutorial QuestionDocument9 pagesTutorial Questionpriyesh.bhatiaNo ratings yet
- 5 CivilFEM Elastic FoundationDocument17 pages5 CivilFEM Elastic FoundationlozadalmNo ratings yet
- Static 12Document4 pagesStatic 12rahul pathakNo ratings yet
- Lec 12Document31 pagesLec 12Saied Aly SalamahNo ratings yet
- Lec9 - Logic SynthesisDocument26 pagesLec9 - Logic SynthesisPrabhavathi PNo ratings yet
- PD Slides03 PartitionDocument88 pagesPD Slides03 PartitionSucharitha ReddyNo ratings yet
- Cables and Arches: Structural Analysis 7 Edition in SI UnitsDocument31 pagesCables and Arches: Structural Analysis 7 Edition in SI Unitsazerai2000No ratings yet
- About The Finite Element Analysis For Beam-Hinged FrameDocument5 pagesAbout The Finite Element Analysis For Beam-Hinged FrameGerry RyanNo ratings yet
- 2008 Artigo - Neural Network-Based Underwater Image ClassificationDocument5 pages2008 Artigo - Neural Network-Based Underwater Image ClassificationGlauber Jean Alves NarcisoNo ratings yet
- The University of Melbourne Department of Civil and Environmental Engineering Semester 1, Assessment 2007Document7 pagesThe University of Melbourne Department of Civil and Environmental Engineering Semester 1, Assessment 2007leonNo ratings yet
- DBI Global StringsDocument18 pagesDBI Global StringsLorem IpsumNo ratings yet
- Handout ASCE 7-05Document59 pagesHandout ASCE 7-05Aqua MarineNo ratings yet
- Finite Element Analysis: Level 6, Semester 1&2 2022-2023Document23 pagesFinite Element Analysis: Level 6, Semester 1&2 2022-2023Sara HaiderNo ratings yet
- 07SQUJS-AK FinalMATH070213 PDFDocument12 pages07SQUJS-AK FinalMATH070213 PDFMistlemagicNo ratings yet
- Linux Clustering Software + Surface Reconstruction From Point CloudsDocument19 pagesLinux Clustering Software + Surface Reconstruction From Point CloudsJaya MuthuvelNo ratings yet
- Seismic Performance of Eccentrically Braced Frames Designed For Canadian ConditionsDocument8 pagesSeismic Performance of Eccentrically Braced Frames Designed For Canadian ConditionsManuel RestrepoNo ratings yet
- PettingaPriestley JEE2005Document22 pagesPettingaPriestley JEE2005Michael Murfinator MurphyNo ratings yet
- Comparison Between Beta Wavelets NeuralDocument6 pagesComparison Between Beta Wavelets NeuralWajdi BELLILNo ratings yet
- Antenna Pattern Synthesis of Shaped-Beam Using A New Combined Algorithm - 2014Document3 pagesAntenna Pattern Synthesis of Shaped-Beam Using A New Combined Algorithm - 2014dfkoejfiNo ratings yet
- Shahzad AkbarDocument9 pagesShahzad Akbarmalihajabbar519No ratings yet
- INTERNAL FORCES (Chapter 7) : Today's ObjectiveDocument28 pagesINTERNAL FORCES (Chapter 7) : Today's ObjectivehaloNo ratings yet
- Irece Temp 4Document9 pagesIrece Temp 4Jean Paul Valdivia JeriNo ratings yet
- RPSC Main Exam 2019: Test Series: Assistant EngineerDocument21 pagesRPSC Main Exam 2019: Test Series: Assistant EngineerAbhinav DhayalNo ratings yet
- Lecture 4: Balanced Binary Search TreesDocument8 pagesLecture 4: Balanced Binary Search Treesshravi188No ratings yet
- Review 1Document17 pagesReview 1habte gebreial shrashrNo ratings yet
- Lecture 11 - Approximate MethodDocument29 pagesLecture 11 - Approximate MethodKhaled AlregebNo ratings yet
- Work and EnergiDocument59 pagesWork and EnergiDiana Ayu PratiwiNo ratings yet
- Hit-Or-Miss Transform: X (X B X, B X)Document50 pagesHit-Or-Miss Transform: X (X B X, B X)ashkash nikeNo ratings yet
- All AssignmentsDocument11 pagesAll AssignmentsJoud RamadanNo ratings yet
- Strip Deflection Compatibility Method ...Document9 pagesStrip Deflection Compatibility Method ...Umed ADA-ALSATARNo ratings yet
- Lecture 5Document45 pagesLecture 5Noman ShahzadNo ratings yet
- Theory of Structures - IVDocument2 pagesTheory of Structures - IVTSEYSETSENo ratings yet
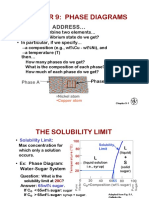
- Chapter 9: Phase Diagrams: Issues To Address..Document26 pagesChapter 9: Phase Diagrams: Issues To Address..SergioNo ratings yet
- Branch and PriceDocument23 pagesBranch and PriceomidbundyNo ratings yet
- Data Structure Question Paper 2018Document2 pagesData Structure Question Paper 2018CW fan pageNo ratings yet
- A Transmission-Constrained Unit Commitment Method: Et AlDocument10 pagesA Transmission-Constrained Unit Commitment Method: Et AlAriel Carlos De LeonNo ratings yet
- VRD-2014UConf GJPark Keynote2 HanyangUDocument71 pagesVRD-2014UConf GJPark Keynote2 HanyangUAshith ShettyNo ratings yet
- Monotonic Cubic Spline InterpolationDocument8 pagesMonotonic Cubic Spline InterpolationRMolina65No ratings yet
- Topic 4 - Mat - FoundationDocument21 pagesTopic 4 - Mat - Foundation彭宇鑫No ratings yet
- CE 701 - Summer 2020 - Lecture 7 (Part 1)Document11 pagesCE 701 - Summer 2020 - Lecture 7 (Part 1)Shahriar Nazim shuvroNo ratings yet
- Block Stacking ProblemDocument10 pagesBlock Stacking ProblemZoob100% (1)
- Global Lower Bounds For The VLSI Macrocell Floorplanning Problem Using Semidefinite OptimizationDocument6 pagesGlobal Lower Bounds For The VLSI Macrocell Floorplanning Problem Using Semidefinite OptimizationshashankbassiNo ratings yet
- CS2040 Tutorial7 AnsDocument5 pagesCS2040 Tutorial7 Ansjoanna tayNo ratings yet
- CH 31Document16 pagesCH 31Dumytritza IoanaNo ratings yet
- Free FEM Course Civil Exercise: Beam On Elastic Springs: IcaeecDocument19 pagesFree FEM Course Civil Exercise: Beam On Elastic Springs: IcaeecDanielRoblesTorresNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design Automationijalab1No ratings yet
- A Novel Approach To Determine Static Voltage Stability Limit and Its Improvement Using TCSC and SVCDocument19 pagesA Novel Approach To Determine Static Voltage Stability Limit and Its Improvement Using TCSC and SVCpurify87No ratings yet
- A Semi-Analytical Solution of Statically IndetermiDocument3 pagesA Semi-Analytical Solution of Statically IndetermiMisganaw YeshiwasNo ratings yet
- Cad 8Document19 pagesCad 8Ritankar GhoshNo ratings yet
- Civil Engineering Department Politeknik Ungku OmarDocument10 pagesCivil Engineering Department Politeknik Ungku OmarasyrafNo ratings yet
- Schwarz DFT-LAPW PDFDocument90 pagesSchwarz DFT-LAPW PDFAnwar Ul HaqNo ratings yet
- 4icee-Stmf Goel PrenstDocument18 pages4icee-Stmf Goel PrenstKYINCNo ratings yet
- Sample Paper-2Document14 pagesSample Paper-2gurmehak singhNo ratings yet
- Power Efficient Special Processor Design For Burrows-Wheeler-Transform-Based Short Read Sequence AlignmentDocument4 pagesPower Efficient Special Processor Design For Burrows-Wheeler-Transform-Based Short Read Sequence AlignmentHasif AimanNo ratings yet
- CIV4235 stm1Document58 pagesCIV4235 stm1benzhuNo ratings yet
- DS - Cat-2 QP - MeDocument2 pagesDS - Cat-2 QP - Megurupandian.cseNo ratings yet
- CI 1580A ENG User ManualDocument50 pagesCI 1580A ENG User ManualArdy KristianNo ratings yet
- Free and Forced Vibration of Repetitive Structures: Dajun Wang, Chunyan Zhou, Jie RongDocument18 pagesFree and Forced Vibration of Repetitive Structures: Dajun Wang, Chunyan Zhou, Jie RongRajesh KachrooNo ratings yet
- Reinforced Concrete Design BS 8110Document15 pagesReinforced Concrete Design BS 8110Kutty Mansoor75% (4)
- Pmled 6 5K 10a 66Document6 pagesPmled 6 5K 10a 66Eduardo SalgadoNo ratings yet
- HSE FRM 32 Final Incident ReportDocument6 pagesHSE FRM 32 Final Incident ReportDilshad aliNo ratings yet
- Boiling MechanismDocument16 pagesBoiling MechanismherawanadifNo ratings yet
- Saes T 629Document10 pagesSaes T 629Azhar Saqlain.No ratings yet
- ABB Isomax Circuit BreakersDocument53 pagesABB Isomax Circuit BreakersAshish GuptaNo ratings yet
- IM KR180A E 4thDocument80 pagesIM KR180A E 4thbatizap batizapNo ratings yet
- Vmware ManualDocument512 pagesVmware ManualMohd Safian ZakariaNo ratings yet
- Amyuni PDF ConverterDocument22 pagesAmyuni PDF ConverterMikeyarnoldNo ratings yet
- LCD Monitor DC T201WA 20070521 185801 Service Manual T201Wa V02Document59 pagesLCD Monitor DC T201WA 20070521 185801 Service Manual T201Wa V02cdcdanielNo ratings yet
- HP4Document88 pagesHP4Alexander Neyra100% (4)
- Financial Auditor Job DescriptionDocument8 pagesFinancial Auditor Job Descriptionfinancemanagement702No ratings yet
- Imeko TC5 2010 009Document4 pagesImeko TC5 2010 009FSNo ratings yet
- Catalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFDocument52 pagesCatalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFPedro MalpicaNo ratings yet
- Application Sys. ReviewDocument4 pagesApplication Sys. ReviewadiltsaNo ratings yet
- WCM Combined Rough DraftDocument258 pagesWCM Combined Rough Draftpalanivendhan_186170No ratings yet
- 9.shift RegistersDocument36 pages9.shift RegistersJagan GNNo ratings yet
- KSB KWP: Non-Clogging Centrifugal PumpsDocument12 pagesKSB KWP: Non-Clogging Centrifugal PumpsalfredNo ratings yet
- CM6 Combined 2013Document154 pagesCM6 Combined 2013مسعد مرزوقىNo ratings yet
- LECTURE 5 Cor 1Document44 pagesLECTURE 5 Cor 1teamrelax75% (4)
- (Basic Training) HSS9820 Data Configuration ISSUE3.30Document76 pages(Basic Training) HSS9820 Data Configuration ISSUE3.30RandyNo ratings yet
- 1Z0 053 PDFDocument36 pages1Z0 053 PDFOscarRamirezNo ratings yet
- Powershell Import Update Users Groups From CSV FileDocument2 pagesPowershell Import Update Users Groups From CSV FilecrakchakibNo ratings yet
- Veritas™ Volume Manager Administrator's Guide Solaris - VXVM - Admin - 51sp1 - SolDocument614 pagesVeritas™ Volume Manager Administrator's Guide Solaris - VXVM - Admin - 51sp1 - Solakkati123No ratings yet
- Wind Load Calculation As Per ASCE 7 10Document8 pagesWind Load Calculation As Per ASCE 7 10ani145yadav100% (1)
- Auto Plin Schema Zapojeni Prepinace Autronic As 101Document28 pagesAuto Plin Schema Zapojeni Prepinace Autronic As 101Tom TalicniNo ratings yet
- Bucher LRV Hydraulic ValveDocument90 pagesBucher LRV Hydraulic Valvedean_lockey0% (1)
- 2015f - CPCS 202 - Quiz 2 - SolutionDocument3 pages2015f - CPCS 202 - Quiz 2 - SolutionOsama MaherNo ratings yet