You might also like
- CP Algo PDFDocument440 pagesCP Algo PDFHasin Apurbo57% (7)
- Practica N3aDocument3 pagesPractica N3aJose Manuel Hernandez GomezNo ratings yet
- Best Ai 2ailDocument75 pagesBest Ai 2ailzelio fernandesNo ratings yet
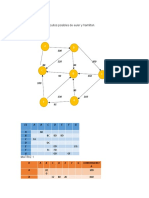
- Solución: Encontrar Todos Los Circuitos Posibles de Euler y HamiltonDocument6 pagesSolución: Encontrar Todos Los Circuitos Posibles de Euler y HamiltonpadmeNo ratings yet
- Final Key As Vetted by The Expert Panel: Key Set C-685 Jr. Engineer (Civil) (Post Code-826) ) Series-ADocument4 pagesFinal Key As Vetted by The Expert Panel: Key Set C-685 Jr. Engineer (Civil) (Post Code-826) ) Series-AKusum LataNo ratings yet
- Drawing Contour Lines from Given Elevation PointsDocument3 pagesDrawing Contour Lines from Given Elevation Pointspaquito castilloNo ratings yet
- Steel Beam Design For Mechanics of Materials Problem and SolutionDocument12 pagesSteel Beam Design For Mechanics of Materials Problem and SolutionhammedNo ratings yet
- Ese-2014 Solution, Answer Key: Ies/Gate/Psus-2014-15Document1 pageEse-2014 Solution, Answer Key: Ies/Gate/Psus-2014-15biswa paulNo ratings yet
- ES302 Contour InterpolationDocument3 pagesES302 Contour InterpolationVd EmmanuelNo ratings yet
- It 2Document46 pagesIt 2Aradhya ModanwalNo ratings yet
- Frequency vs. DecibelsDocument2 pagesFrequency vs. Decibelsapi-11267125No ratings yet
- DFW-L-T crane travel unit wheel dimensions and connection variantsDocument3 pagesDFW-L-T crane travel unit wheel dimensions and connection variantsAli Zeynel KaplanserenNo ratings yet
- Answer Keys For ITI ITO Objective PapersDocument29 pagesAnswer Keys For ITI ITO Objective PapersEm HangshingNo ratings yet
- Post 4 DDocument37 pagesPost 4 DAnuuNo ratings yet
- 3.1.2 VLOOKUP FunctionDocument2 pages3.1.2 VLOOKUP FunctionAaron OrogNo ratings yet
- Junior Engineer Exam Answer Key Series A & BDocument4 pagesJunior Engineer Exam Answer Key Series A & BAshish VermaNo ratings yet
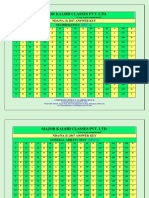
- Major Kalshi Classes Pvt. LTD.: Nda/Na (I) 2017 Answer Key MathematicsDocument2 pagesMajor Kalshi Classes Pvt. LTD.: Nda/Na (I) 2017 Answer Key MathematicsSagar NaikNo ratings yet
- PROVISIONAL ANSWER KEY - General Studies & History, Paper-4Document1 pagePROVISIONAL ANSWER KEY - General Studies & History, Paper-4Sunny KumarNo ratings yet
- SB SX 2021 AnskeyDocument3 pagesSB SX 2021 Anskeysuchi ravaliaNo ratings yet
- Mock5 KeyDocument2 pagesMock5 KeyLokeshNo ratings yet
- Answer Key of Mathematics SET-C' - NDA 2018Document2 pagesAnswer Key of Mathematics SET-C' - NDA 2018WarNo ratings yet
- Mock5 Key-1Document2 pagesMock5 Key-1LokeshNo ratings yet
- Major Kalshi Classes Pvt. LTD.: Nda/Na (I) 2017 Answer Key MathematicsDocument2 pagesMajor Kalshi Classes Pvt. LTD.: Nda/Na (I) 2017 Answer Key MathematicsVicky KumarNo ratings yet
- Help For KVPYDocument1 pageHelp For KVPYPriyangshu SarkarNo ratings yet
- Combined State Civil/Upper Sub-Ordinate Services (Pre) Exam 2016 General Studies Answer Key Series ADocument4 pagesCombined State Civil/Upper Sub-Ordinate Services (Pre) Exam 2016 General Studies Answer Key Series ANDTVNo ratings yet
- Design Online Academy Udemy course Ansys Static Analysis Pulley Bracket Stress DeformationDocument2 pagesDesign Online Academy Udemy course Ansys Static Analysis Pulley Bracket Stress DeformationKris CunninghamNo ratings yet
- NB 2023 09 01 09Document1 pageNB 2023 09 01 09Sachin KumarNo ratings yet
- Upsc Ies (Ese) Xam: Mechanical Engineering Answer KeyDocument4 pagesUpsc Ies (Ese) Xam: Mechanical Engineering Answer KeyAaradhya MishraNo ratings yet
- Percentage Class NotesDocument6 pagesPercentage Class NotesSid MalhotraNo ratings yet
- Scientific Technical Assistant-A Answer Key (C) NIELIT/NIC/2020/1 WRITTEN EXAMINATION 22/11/2020Document1 pageScientific Technical Assistant-A Answer Key (C) NIELIT/NIC/2020/1 WRITTEN EXAMINATION 22/11/2020samshadnc 007No ratings yet
- Taha Associates - Step Ejector PinDocument2 pagesTaha Associates - Step Ejector PinTaha AssociatesNo ratings yet
- Final Key As Vetted by The Expert Panel: Key Set C-688 Junior Engineer (Electrical) (Post Code-829) Series-ADocument1 pageFinal Key As Vetted by The Expert Panel: Key Set C-688 Junior Engineer (Electrical) (Post Code-829) Series-AAshok KumarNo ratings yet
- Dap An Tieng Anh 2014-2015 ChinhthucDocument3 pagesDap An Tieng Anh 2014-2015 ChinhthucHoang Anh ĐứcNo ratings yet
- National University: Department of Civil Engineering Fgetec2 Seatwork NO. 2 Shear Strength of SoilDocument2 pagesNational University: Department of Civil Engineering Fgetec2 Seatwork NO. 2 Shear Strength of SoilArciel Leynes AdornadoNo ratings yet
- C-700 Junior Officer (Supervisory Trainee-It) at S-0 Level-841Document4 pagesC-700 Junior Officer (Supervisory Trainee-It) at S-0 Level-841rishab bhagtaNo ratings yet
- Mock Test - TS Minority Study Circle - 07-09-2022 - KeyDocument1 pageMock Test - TS Minority Study Circle - 07-09-2022 - KeyMD SIKENDER ALINo ratings yet
- NB 2022 10 01 06Document4 pagesNB 2022 10 01 06SISIR BISWASNo ratings yet
- Provisional Answer Key for SSLC Level ExamDocument1 pageProvisional Answer Key for SSLC Level ExamHshshhshsNo ratings yet
- 18 July KeyDocument1 page18 July KeyrajeshNo ratings yet
- Ii Year Bitsat FT-1 Ex. Dt. 18.05.2023 KeyDocument1 pageIi Year Bitsat FT-1 Ex. Dt. 18.05.2023 KeybvnrjsbvnrjsNo ratings yet
- NIELIT/NIC/2020/1 WRITTEN EXAMINATION 22/11/2020 Scientist B Answer Key - Series CDocument1 pageNIELIT/NIC/2020/1 WRITTEN EXAMINATION 22/11/2020 Scientist B Answer Key - Series Csamshadnc 007No ratings yet
- Technical General Question Bank For DGCA Prep PPL CPL 2Document6 pagesTechnical General Question Bank For DGCA Prep PPL CPL 2aashesh puriNo ratings yet
- PH 400Document147 pagesPH 400Valdemir da silvaNo ratings yet
- Technical General Question Bank For DGCA Prep PPL CPL 2Document6 pagesTechnical General Question Bank For DGCA Prep PPL CPL 2Chetna PuriNo ratings yet
- New Invert Levels SR - 13 To Existing MH No House Invert Level PCC Bottom SlopeDocument5 pagesNew Invert Levels SR - 13 To Existing MH No House Invert Level PCC Bottom SlopeSantosh ChowdaryNo ratings yet
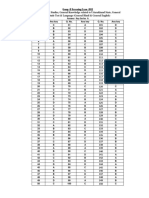
- Sub.: General Studies, General Knowledge Related To Uttarakhand State, General Aptitude Test & Language (General Hindi & General English)Document5 pagesSub.: General Studies, General Knowledge Related To Uttarakhand State, General Aptitude Test & Language (General Hindi & General English)amitNo ratings yet
- Xi KepegawaianDocument12 pagesXi Kepegawaiantekla laianNo ratings yet
- Kvpy SB-SXDocument1 pageKvpy SB-SXnemadownloadsNo ratings yet
- TAOS - SET D Key PDFDocument1 pageTAOS - SET D Key PDFJAO junior accounts officer onlineNo ratings yet
- TAOS - SET D KeyDocument1 pageTAOS - SET D KeyJAO junior accounts officer onlineNo ratings yet
- Kvpy SB-SXDocument1 pageKvpy SB-SXtyciNo ratings yet
- KVPY 2021 Answer KeyDocument1 pageKVPY 2021 Answer Keyrohan sinhaNo ratings yet
- Kvpy SB-SX Answer KeyDocument1 pageKvpy SB-SX Answer KeyVignesh AvirineniNo ratings yet
- KVPY Answer Keys 19 NOV 2017 SB-SX Class 12Document1 pageKVPY Answer Keys 19 NOV 2017 SB-SX Class 12anuragNo ratings yet
- Database ExampleDocument3 pagesDatabase Exampleapi-372210487No ratings yet
- NB 2023 09 01 03Document1 pageNB 2023 09 01 03tanmayaman202No ratings yet
- NB 2023 09 01 03Document1 pageNB 2023 09 01 03tanmayaman202No ratings yet
- Bihar Judiciary Preliminary (LAW) Exam Answer Key 2020Document4 pagesBihar Judiciary Preliminary (LAW) Exam Answer Key 2020Aadya AmbasthaNo ratings yet
- 676 (Ans)Document4 pages676 (Ans)AMAN KUMAR PASS12NM4073/2019No ratings yet
- Item AnalysisDocument4 pagesItem AnalysisErika Joy MorgaNo ratings yet
- Ai Lect7 Expert SystemDocument183 pagesAi Lect7 Expert SystemMenna SaedNo ratings yet
- The states in this problem are independent of each other. Moving one block does not affect the possible moves for other blocks. So this is an example of a problem with independent statesDocument81 pagesThe states in this problem are independent of each other. Moving one block does not affect the possible moves for other blocks. So this is an example of a problem with independent statesMenna SaedNo ratings yet
- Ai Lect4 GamesDocument30 pagesAi Lect4 GamesMenna SaedNo ratings yet
- Full (Operating System)Document146 pagesFull (Operating System)Saguira AkilNo ratings yet
- Artificial Intelligence and Neural Networks ExplainedDocument84 pagesArtificial Intelligence and Neural Networks ExplainedMenna SaedNo ratings yet
- Ai Lect5 CSPDocument36 pagesAi Lect5 CSPMenna SaedNo ratings yet
- AI Sheet FuzzyDocument1 pageAI Sheet FuzzyMenna SaedNo ratings yet
- AI Sheet NNDocument2 pagesAI Sheet NNMenna SaedNo ratings yet
- AI Sheet SearchDocument4 pagesAI Sheet SearchMenna SaedNo ratings yet
- 4-Data Preprocessing (Cleaning) and ExplorationDocument54 pages4-Data Preprocessing (Cleaning) and ExplorationMenna SaedNo ratings yet
- AI Sheet GamesDocument3 pagesAI Sheet GamesMenna SaedNo ratings yet
- Ai Lect1 IntroductionDocument60 pagesAi Lect1 IntroductionMenna SaedNo ratings yet
- Lec6 Web ProgrammingDocument28 pagesLec6 Web ProgrammingMenna SaedNo ratings yet
- AI Sheet LogicDocument3 pagesAI Sheet LogicMenna SaedNo ratings yet
- 3-Customer Segmentation RFM ModDocument45 pages3-Customer Segmentation RFM ModMenna Saed100% (2)
- 5-Information & VisualizationDocument78 pages5-Information & VisualizationMenna SaedNo ratings yet
- Ai Lect6 GeneticDocument94 pagesAi Lect6 GeneticMenna SaedNo ratings yet
- Lec1 Web ProgrammingDocument36 pagesLec1 Web ProgrammingMenna SaedNo ratings yet
- 1-Introduction To Data ScienceDocument33 pages1-Introduction To Data ScienceMenna SaedNo ratings yet
- Lec5 Web ProgrammingDocument39 pagesLec5 Web ProgrammingMenna SaedNo ratings yet
- 3-Customer Segmentation RFM ModDocument45 pages3-Customer Segmentation RFM ModMenna Saed100% (2)
- Lec2 Web ProgrammingDocument40 pagesLec2 Web ProgrammingMenna SaedNo ratings yet
- 2-Data Collection and PreperationDocument43 pages2-Data Collection and PreperationMenna SaedNo ratings yet
- Ai Lect5 CSPDocument36 pagesAi Lect5 CSPMenna SaedNo ratings yet
- Lec4 Web ProgrammingDocument37 pagesLec4 Web ProgrammingMenna SaedNo ratings yet
- Lec3 Web ProgrammingDocument29 pagesLec3 Web ProgrammingMenna SaedNo ratings yet
- Ai Lect3 Search2Document135 pagesAi Lect3 Search2Menna SaedNo ratings yet
- Lec0 Web ProgrammingDocument11 pagesLec0 Web ProgrammingMenna SaedNo ratings yet
- The states in this problem are independent of each other. Moving one block does not affect the possible moves for other blocks. So this is an example of a problem with independent statesDocument81 pagesThe states in this problem are independent of each other. Moving one block does not affect the possible moves for other blocks. So this is an example of a problem with independent statesMenna SaedNo ratings yet
- MATH3290 Assignment 3Document2 pagesMATH3290 Assignment 3Kan SamuelNo ratings yet
- Greedy Algorithms for Optimization ProblemsDocument39 pagesGreedy Algorithms for Optimization ProblemsHarsh SoniNo ratings yet
- Unit 2Document45 pagesUnit 2Ayush AgarwalNo ratings yet
- CSE 373 Sample Final Exam: Instructions Read The Directions For Each Question Carefully Before Answering. We MayDocument12 pagesCSE 373 Sample Final Exam: Instructions Read The Directions For Each Question Carefully Before Answering. We MayDeadly ChillerNo ratings yet
- DICE Template-ProjectReportDocument20 pagesDICE Template-ProjectReportFaizan ChaudharyNo ratings yet
- DAA MaterialDocument12 pagesDAA MaterialdagiNo ratings yet
- Further Mathematics: Pearson Edexcel Level 3 GCEDocument12 pagesFurther Mathematics: Pearson Edexcel Level 3 GCEUmmea AkterNo ratings yet
- cs8451 Iq 2 M PDFDocument8 pagescs8451 Iq 2 M PDFP.DhivyaNo ratings yet
- Computer Networks Lab Manual LatestDocument44 pagesComputer Networks Lab Manual LatestKande Archana K100% (2)
- The Knapsack Problem: Lecture 16 - Greedy AlgorithmsDocument6 pagesThe Knapsack Problem: Lecture 16 - Greedy AlgorithmsTigabu YayaNo ratings yet
- (Revised) Term-End Examination, 2019: No. of Printed Pages: 4 BCS-042Document4 pages(Revised) Term-End Examination, 2019: No. of Printed Pages: 4 BCS-042Dilbagh SinghNo ratings yet
- Graph Theory by Tero HarjuDocument99 pagesGraph Theory by Tero HarjuabelousNo ratings yet
- Lab ManualDocument20 pagesLab ManualMuthukrishnan NNo ratings yet
- CS1201 DatastructureDocument5 pagesCS1201 DatastructureShruthi BhatNo ratings yet
- Impact of Image Processing in Saving The Human Life by Automating Traffic SignalsDocument7 pagesImpact of Image Processing in Saving The Human Life by Automating Traffic SignalsInternational Journal of Sensor & Related NetworksNo ratings yet
- Ec6301 - Object Oriented Programming and Data StructureDocument22 pagesEc6301 - Object Oriented Programming and Data Structurevivekpandian01No ratings yet
- Expert Route Planning Reduces Waste Collection CostsDocument10 pagesExpert Route Planning Reduces Waste Collection CostsRohan BachhavNo ratings yet
- Graph Sheet V.2Document13 pagesGraph Sheet V.2youssef amrNo ratings yet
- Ai - MaterialDocument58 pagesAi - MaterialchanduNo ratings yet
- Chapter 02 UninformedSearchDocument42 pagesChapter 02 UninformedSearchAd ManNo ratings yet
- Final SolutionsDocument20 pagesFinal SolutionsKhatia IvanovaNo ratings yet
- Shortest Path Algorithms Compared for Aircraft NavigationDocument14 pagesShortest Path Algorithms Compared for Aircraft NavigationAkshay JaithaliaNo ratings yet
- PLS Algorithm Settings in SmartPLSDocument3 pagesPLS Algorithm Settings in SmartPLSWyf WongNo ratings yet
- AI - Lecture 2 - Uninformed SearchDocument20 pagesAI - Lecture 2 - Uninformed SearchHunterxHunter03No ratings yet
- 23 Bellman Ford Algorithm 13-03-2024Document13 pages23 Bellman Ford Algorithm 13-03-2024KBS SrikarNo ratings yet
- Download More:- MCA Algorithm Design Analysis PapersDocument83 pagesDownload More:- MCA Algorithm Design Analysis PapersShubbyy ChanNo ratings yet
- CCN Lab Manual VtuDocument21 pagesCCN Lab Manual VtuDr Narayana Swamy Ramaiah50% (2)
- Single-Source Shortest Paths in DAGs (SSSP DAGDocument43 pagesSingle-Source Shortest Paths in DAGs (SSSP DAGsamroniNo ratings yet
- Calicut University Syllabus For Eight Semester Computer Science & EngineeringDocument30 pagesCalicut University Syllabus For Eight Semester Computer Science & EngineeringAkhil V MohanNo ratings yet