You might also like
- Petrel TrainingDocument36 pagesPetrel TrainingFarah Taha AbdullahNo ratings yet
- Integrated Data Warehouse Repository For Business Intelligence And Decision MakingDocument33 pagesIntegrated Data Warehouse Repository For Business Intelligence And Decision Makingudaykishorep100% (2)
- Advanced C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandAdvanced C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Tutorialspoint For R PDFDocument34 pagesTutorialspoint For R PDFPratishtha94100% (1)
- DIP Lab 10Document11 pagesDIP Lab 10mahadm.bscs21seecsNo ratings yet
- Project PlanDocument8 pagesProject Planapi-532121045No ratings yet
- A145286344 23681 24 2018 TensorflowDocument15 pagesA145286344 23681 24 2018 TensorflowRohit KolliNo ratings yet
- Chapter 1Document40 pagesChapter 1Wiki EthiopiaNo ratings yet
- Autoencoders: Parallel Programming Parallel ProcessingDocument5 pagesAutoencoders: Parallel Programming Parallel ProcessingbaskarchennaiNo ratings yet
- Intro To Data StructureDocument24 pagesIntro To Data StructureFreeNet CodesNo ratings yet
- Lecture 3a - Deployment To MicrocontrollerDocument41 pagesLecture 3a - Deployment To MicrocontrollerYi HengNo ratings yet
- Algorithm Teach Chapter 1 73448Document24 pagesAlgorithm Teach Chapter 1 73448Elijah IbsaNo ratings yet
- 6 CNNDocument50 pages6 CNNSWAMYA RANJAN DASNo ratings yet
- Digital Image Processing WorkshopDocument55 pagesDigital Image Processing WorkshopAbhinav GuptaNo ratings yet
- Unit 5Document14 pagesUnit 5aaNo ratings yet
- Project PresentationDocument28 pagesProject PresentationSathiya VaniNo ratings yet
- Data Preprocessing for Machine Learning ProjectsDocument12 pagesData Preprocessing for Machine Learning ProjectsBongkar TaktikNo ratings yet
- Data Preprocessing for Machine Learning ProjectsDocument12 pagesData Preprocessing for Machine Learning ProjectsBongkar TaktikNo ratings yet
- Introduction To Data Structures & Algorithms: Mary Jane M. HipolDocument23 pagesIntroduction To Data Structures & Algorithms: Mary Jane M. HipolHarold LapastoraNo ratings yet
- PyTorch PDFDocument72 pagesPyTorch PDFPranit ShindeNo ratings yet
- Algorithm AllDocument112 pagesAlgorithm AllHabtieNo ratings yet
- Data Science - Sem6Document118 pagesData Science - Sem6Dinesh K Lohar100% (1)
- Data Structures and Algorithms AnalysisDocument45 pagesData Structures and Algorithms AnalysisasratNo ratings yet
- Team Name - Codesmashers Team Members - Manmeet Singh Tuteja, Raghav GuptaDocument4 pagesTeam Name - Codesmashers Team Members - Manmeet Singh Tuteja, Raghav Guptamanmeet singh tutejaNo ratings yet
- INDUSTRY 2 AkshatDocument12 pagesINDUSTRY 2 AkshatKrish ParekhNo ratings yet
- PyTorch Plus Computer Vision - Aravind AriharasudhanDocument28 pagesPyTorch Plus Computer Vision - Aravind AriharasudhanAravind AriharasudhanNo ratings yet
- Image Preprocessing and Feature Extraction in CNNsDocument10 pagesImage Preprocessing and Feature Extraction in CNNsALNATRON GROUPSNo ratings yet
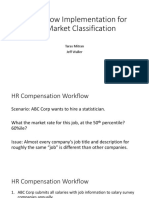
- Tensorflow Implementation For Job Market Classification: Taras Mitran Jeff WallerDocument46 pagesTensorflow Implementation For Job Market Classification: Taras Mitran Jeff Wallersubhanshu babbarNo ratings yet
- Problem Solving & Program DevelopmentDocument18 pagesProblem Solving & Program Developmentsandy31349No ratings yet
- Torch: The Fundamentals ofDocument45 pagesTorch: The Fundamentals ofAravind AriharasudhanNo ratings yet
- Introduction To Software Rendering On Embedded SystemsDocument22 pagesIntroduction To Software Rendering On Embedded SystemsAhmed HamoudaNo ratings yet
- Project Topics & Additional Libraries Updated For SS 2018Document32 pagesProject Topics & Additional Libraries Updated For SS 2018Kaustav PaulNo ratings yet
- Building Good Training Sets UNIT 1 PART2Document46 pagesBuilding Good Training Sets UNIT 1 PART2Aditya SharmaNo ratings yet
- DATA STRUCTURES-lect1Document97 pagesDATA STRUCTURES-lect1Anu GauNo ratings yet
- Blockchain Platforms Allow The Development of Blockchain-BasedDocument22 pagesBlockchain Platforms Allow The Development of Blockchain-BasedNithya PrasathNo ratings yet
- Algorithm DesignDocument6 pagesAlgorithm Designrajvir.ramdasNo ratings yet
- Data Structures - Algorithms BasicsDocument8 pagesData Structures - Algorithms BasicsjeoNo ratings yet
- Flowcharts 1Document68 pagesFlowcharts 1amanrajsinghars31No ratings yet
- INDUSTRY 2 JaiminDocument14 pagesINDUSTRY 2 JaiminKrish ParekhNo ratings yet
- Software & Hardware Co-DesignDocument40 pagesSoftware & Hardware Co-DesignpolskakamlangeniNo ratings yet
- Hardware Software Co-Design ModelsDocument37 pagesHardware Software Co-Design ModelsbalakrishnaNo ratings yet
- CH4-7 GRAPH LectureDocument36 pagesCH4-7 GRAPH LecturepyramidmistreNo ratings yet
- Day5 FDP IoT Part1Document89 pagesDay5 FDP IoT Part1ksisodiaNo ratings yet
- Algorithm Chapter 1 (Algorithm Analysis)Document14 pagesAlgorithm Chapter 1 (Algorithm Analysis)Leta TsegayeNo ratings yet
- Chapter-2-Data Structures and Algorithms AnalysisDocument44 pagesChapter-2-Data Structures and Algorithms Analysisbini100% (1)
- Machine Learning Concepts for HealthcareDocument16 pagesMachine Learning Concepts for HealthcareRaj PhysioNo ratings yet
- PyTorch Tutorial: Train and Test a ModelDocument29 pagesPyTorch Tutorial: Train and Test a ModelMinh NguyenNo ratings yet
- BTP PresentationDocument29 pagesBTP PresentationSAJAL PATHAKNo ratings yet
- Introduction Data Structures and Algorithm-1Document20 pagesIntroduction Data Structures and Algorithm-1calvinakiweley54No ratings yet
- XAI FinalDocument18 pagesXAI FinalRomil MehlaNo ratings yet
- Semi Supervised LearningDocument86 pagesSemi Supervised Learningchaudharylalit025No ratings yet
- 20180728113008D1526 - Session 01 Program Design, Pseudocode, and Developing An Algorithm LDocument34 pages20180728113008D1526 - Session 01 Program Design, Pseudocode, and Developing An Algorithm Lraksiyt2001No ratings yet
- DLDocument9 pagesDLReshma PatilNo ratings yet
- PPT Lecture 2.1.1Document15 pagesPPT Lecture 2.1.1deadlygamer6996No ratings yet
- Image Processing With TensorFlowDocument29 pagesImage Processing With TensorFlowMarc Reyes100% (2)
- MapReduce: A Parallel Processing Model for Big DataDocument29 pagesMapReduce: A Parallel Processing Model for Big DatagenaceNo ratings yet
- A Data Structure and AlgoritmsDocument87 pagesA Data Structure and AlgoritmsKWHNo ratings yet
- Computational GraphDocument17 pagesComputational GraphRam MurthyNo ratings yet
- Machine Learning With Real Life Project: by - Rishabh GaurDocument26 pagesMachine Learning With Real Life Project: by - Rishabh GaurRishab Gaur100% (2)
- Optimizing Image Analysis For SpeedDocument7 pagesOptimizing Image Analysis For Speedvlp_bkNo ratings yet
- Lesson Review1 ITEL460Document42 pagesLesson Review1 ITEL460Orville BalangueNo ratings yet
- Machine Learning with Python: A Comprehensive Guide with a Practical ExampleFrom EverandMachine Learning with Python: A Comprehensive Guide with a Practical ExampleNo ratings yet
- (Signers) SUPiD M14 - 2020 - 10 - 15Document2 pages(Signers) SUPiD M14 - 2020 - 10 - 15Sam Al AbabNo ratings yet
- Python Programming Course Material Unit 2Document23 pagesPython Programming Course Material Unit 2Yelkampati Reddy UdayNo ratings yet
- Class 6 KeyDocument8 pagesClass 6 Keyshivamsingh.fscNo ratings yet
- 3 Introduction - RecommendationDocument76 pages3 Introduction - RecommendationLJ UretaNo ratings yet
- Sample - Final Year ReportDocument52 pagesSample - Final Year ReportAjit RajNo ratings yet
- HP Laserjet Pro MFP M127Fn: Short Data SheetDocument4 pagesHP Laserjet Pro MFP M127Fn: Short Data SheetIsaac Musiwa BandaNo ratings yet
- Fdotconnectordroadway 3dmodelingDocument188 pagesFdotconnectordroadway 3dmodelingbin zhaoNo ratings yet
- Migration Cockpit Enhancement For Missing Migration Objects Using BAPI in SAP S/4HANA On'premiseDocument121 pagesMigration Cockpit Enhancement For Missing Migration Objects Using BAPI in SAP S/4HANA On'premisePrinceNo ratings yet
- 3D Animation - IntroductionDocument11 pages3D Animation - IntroductionAiman ArifNo ratings yet
- DSP LAB File 20bec095Document19 pagesDSP LAB File 20bec095GOURAV MAHORENo ratings yet
- Engineering Manual: Digivis 500Document29 pagesEngineering Manual: Digivis 500BENKOUIDER LakhdarNo ratings yet
- Scrivener Manual MacDocument847 pagesScrivener Manual MacrodrigomichellNo ratings yet
- Plant Disease Detection Using CNNDocument7 pagesPlant Disease Detection Using CNNNeha BhatiNo ratings yet
- Getting Started With Ubuntu 14.04Document139 pagesGetting Started With Ubuntu 14.04Jasmin KaricNo ratings yet
- Chap 4 VirtualizationDocument44 pagesChap 4 Virtualizationashish.182035No ratings yet
- Automated Bottle Cap Inspection Using MaDocument6 pagesAutomated Bottle Cap Inspection Using MaThong NguyenNo ratings yet
- Using MaxEnt - WCSP2012 Species Distribution Modelling Workshop 0.1 DocumentationDocument4 pagesUsing MaxEnt - WCSP2012 Species Distribution Modelling Workshop 0.1 DocumentationgeraldNo ratings yet
- Chapter 6Document124 pagesChapter 6Saichandar Reddy LethakulaNo ratings yet
- PDF Reader PDF Reader Create PDF Documents Unit ConvertorDocument79 pagesPDF Reader PDF Reader Create PDF Documents Unit ConvertorSenthil Velavan S100% (1)
- 9210-1-Teachers-Notes-InternationalComputerScience-Jun22-E3Document15 pages9210-1-Teachers-Notes-InternationalComputerScience-Jun22-E3Kyle ZhangNo ratings yet
- Windows 11 Fixes To Common ProblemsDocument28 pagesWindows 11 Fixes To Common Problemskelemework dagneNo ratings yet
- DO Qualification Kit: Simulink Code Inspector™ Tool Operational RequirementsDocument23 pagesDO Qualification Kit: Simulink Code Inspector™ Tool Operational RequirementsÍcaro VianaNo ratings yet
- Software For Gas Chromatographs User ManualDocument516 pagesSoftware For Gas Chromatographs User ManualMohammad Asif ZakriyyaNo ratings yet
- HCIP-AI-EI Developer V2.0 Lab GuideDocument218 pagesHCIP-AI-EI Developer V2.0 Lab GuideWasapol PooritanasarnNo ratings yet
- ES Design ProcessDocument6 pagesES Design ProcessajiNo ratings yet
- JavascriptDocument3 pagesJavascriptTodd HerreraNo ratings yet
- PG Diploma Interior DesignDocument29 pagesPG Diploma Interior DesignJeremy HensleyNo ratings yet
- How To Create PDF Reports With Python - The Essential Guide - Python-BloggersDocument8 pagesHow To Create PDF Reports With Python - The Essential Guide - Python-BloggersMario Colosso V.No ratings yet