You might also like
- Entry Test Preparation: Past Paper of PieasDocument9 pagesEntry Test Preparation: Past Paper of Pieasshoaib2769504100% (1)
- Lec2 Forward KinematicsDocument22 pagesLec2 Forward KinematicsbalkyderNo ratings yet
- Lesson PlanDocument20 pagesLesson PlanMuhammad Fadhli100% (1)
- Lesson 18 - Et332b.ppsxDocument14 pagesLesson 18 - Et332b.ppsxAbdalla AlfakiNo ratings yet
- Chuong 1Document80 pagesChuong 1Hao DucNo ratings yet
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDocument44 pagesIntroduction To ROBOTICS: Kinematics of Robot ManipulatoranantheshkNo ratings yet
- Introduction To ROBOTICS: Mobot: Mobile RobotDocument50 pagesIntroduction To ROBOTICS: Mobot: Mobile RobotManar HosnyNo ratings yet
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDocument44 pagesIntroduction To ROBOTICS: Kinematics of Robot Manipulatorharikiran3285No ratings yet
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDocument44 pagesIntroduction To ROBOTICS: Kinematics of Robot ManipulatorEric KerrNo ratings yet
- Lecture 4Document34 pagesLecture 4Muhammad Usama Bin TahirNo ratings yet
- Lecture 4Document34 pagesLecture 4Wolf DragonneNo ratings yet
- Introduction To ROBOTICS: Robot Kinematics IIDocument46 pagesIntroduction To ROBOTICS: Robot Kinematics IIsureshbtNo ratings yet
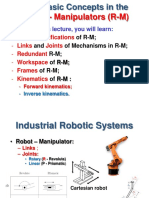
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Document28 pagesTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Advances in Robotics Lecture 5.Document78 pagesAdvances in Robotics Lecture 5.AkashNo ratings yet
- Module 01 - IntroductionDocument37 pagesModule 01 - Introductionneelesh2k5No ratings yet
- Introduction To Robotics: TextsDocument17 pagesIntroduction To Robotics: TextsVienNgocQuangNo ratings yet
- 09 DirectKinematics PDFDocument31 pages09 DirectKinematics PDFSi Mohamed RahiliNo ratings yet
- Mobile RobotDocument50 pagesMobile RobotArun GuptaNo ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- Unit 2 (Finite Transformation)Document28 pagesUnit 2 (Finite Transformation)Meenakshi PriyaNo ratings yet
- Lecture Slide 4-Forward KinematicsDocument22 pagesLecture Slide 4-Forward KinematicseliasfnzNo ratings yet
- 020 Kinema Tic SenDocument44 pages020 Kinema Tic SenTonatiuh Hernández CortésNo ratings yet
- Robot Kinematics Powerpoint PDFDocument45 pagesRobot Kinematics Powerpoint PDFkwastekNo ratings yet
- Direct Kinematics: Robotics 1Document31 pagesDirect Kinematics: Robotics 1VictorHernandezNo ratings yet
- Robot PDFDocument56 pagesRobot PDFfranklin getialNo ratings yet
- Direct Kinematics: Robotics 1Document33 pagesDirect Kinematics: Robotics 1Jorge Ballesteros CaceresNo ratings yet
- Lecture 1 - 3 Introduction - Descriptions, Kinematics Dynamics (01-11-27)Document28 pagesLecture 1 - 3 Introduction - Descriptions, Kinematics Dynamics (01-11-27)MahdiNo ratings yet
- Robots and Manipulators Matlab® Tutorials: PresentationsDocument20 pagesRobots and Manipulators Matlab® Tutorials: PresentationsJeanne DaherNo ratings yet
- Lecture1 2019Document27 pagesLecture1 2019JuliusNo ratings yet
- 5 2 MotionPlan2 Manipulator Motion JacobiansDocument10 pages5 2 MotionPlan2 Manipulator Motion Jacobiansjiminsi7btsNo ratings yet
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523No ratings yet
- Lecture 6Document32 pagesLecture 6Muhammad Usama Bin TahirNo ratings yet
- Chapter Two Part 2Document30 pagesChapter Two Part 2Wiz Nati XvNo ratings yet
- Introduction To ROBOTICS: OutlineDocument7 pagesIntroduction To ROBOTICS: OutlineshaheerdurraniNo ratings yet
- SChwab UICSep 2004Document39 pagesSChwab UICSep 2004Kamal DorajNo ratings yet
- Push-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsDocument13 pagesPush-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsGegee_6111No ratings yet
- Robótica: IntroducciónDocument34 pagesRobótica: IntroducciónFritzDeepNo ratings yet
- Influence LinesDocument100 pagesInfluence LinesAshish OjhaNo ratings yet
- Chapter 4 - Robot KinematicsDocument38 pagesChapter 4 - Robot KinematicsteamehadushNo ratings yet
- Theme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021Document48 pagesTheme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- InTech-Cartesian Control For Robot ManipulatorsDocument50 pagesInTech-Cartesian Control For Robot ManipulatorsMahesh Kumar RathinamNo ratings yet
- Class 4.1Document17 pagesClass 4.1Daystar YtNo ratings yet
- SimplificationDocument37 pagesSimplificationziliang.miao26No ratings yet
- EEN-408 Hidrodinâmica Aplicada II: 3. Prediction of Ship ManoeuvrabilityDocument30 pagesEEN-408 Hidrodinâmica Aplicada II: 3. Prediction of Ship ManoeuvrabilityBarbara OliveiraNo ratings yet
- UNIT 2 PPTDocument98 pagesUNIT 2 PPTsuganya004No ratings yet
- Chap9 Bayesian Mapping HowieDocument78 pagesChap9 Bayesian Mapping Howiemujtabaiftikhar156No ratings yet
- Robot Kinematics - TransformationDocument57 pagesRobot Kinematics - TransformationHoney RathoreNo ratings yet
- Direct Manipulator Kinematics: ReviewDocument50 pagesDirect Manipulator Kinematics: ReviewMD Mahmudul Hasan MasudNo ratings yet
- Topology and Quantum States: M. Aguado, J.I. Cirac, G. VidalDocument1 pageTopology and Quantum States: M. Aguado, J.I. Cirac, G. VidalfkpedeNo ratings yet
- Chapter Ten Introduction To Computational Fluid DynamicsDocument28 pagesChapter Ten Introduction To Computational Fluid DynamicsMisge ChekoleNo ratings yet
- 03 Orb Mech 2003Document33 pages03 Orb Mech 2003kkonthenetNo ratings yet
- Molecular Modeling: Conformational Molecular Field Analysis (Comfa)Document40 pagesMolecular Modeling: Conformational Molecular Field Analysis (Comfa)Quty Papa KannaNo ratings yet
- Lecture 8 Map Building 2Document34 pagesLecture 8 Map Building 2jack2423No ratings yet
- Industrial Robotics: Course OutcomesDocument74 pagesIndustrial Robotics: Course OutcomesMeenakshi PriyaNo ratings yet
- Motion Control Pick N Place ManipulatorDocument9 pagesMotion Control Pick N Place ManipulatorChandrasekar ElankannanNo ratings yet
- Introduction Robotics Lecture4Document45 pagesIntroduction Robotics Lecture4Narasimman SamiNo ratings yet
- 3.4.1 Catch Up Rate For Nearby Orbits: Space Mission Design and OperationsDocument35 pages3.4.1 Catch Up Rate For Nearby Orbits: Space Mission Design and OperationsKaran AgrawalNo ratings yet
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- Robotics 7Document17 pagesRobotics 7nadiaNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Analysis and Control of Nonlinear Infinite Dimensional SystemsFrom EverandAnalysis and Control of Nonlinear Infinite Dimensional SystemsNo ratings yet
- MCH3008 Lab ProjectDocument4 pagesMCH3008 Lab ProjectEJAZ AHMADNo ratings yet
- Structural Dynamics For The Practising Engineer - 1986Document221 pagesStructural Dynamics For The Practising Engineer - 1986Caro AG100% (4)
- (Modeling and Simulation in Science, Engineering and Technology) Nicola Bellomo, Abdelghani Bellouquid, Livio Gibelli, Nisrine Outada (auth.) - A Quest Towards a Mathematical Theory of Living Systems-.pdfDocument191 pages(Modeling and Simulation in Science, Engineering and Technology) Nicola Bellomo, Abdelghani Bellouquid, Livio Gibelli, Nisrine Outada (auth.) - A Quest Towards a Mathematical Theory of Living Systems-.pdfruygarcia75No ratings yet
- MS Unit No 2Document18 pagesMS Unit No 2Hitesh PatilNo ratings yet
- Black BodyDocument29 pagesBlack BodySukhwinder Singh GillNo ratings yet
- An Improved Transformer Inrush Restraint AlgorithmDocument29 pagesAn Improved Transformer Inrush Restraint AlgorithmNguyen Xuan TungNo ratings yet
- EENGDocument4 pagesEENGrbNo ratings yet
- 9702 w11 QP 23Document16 pages9702 w11 QP 23Hubbak KhanNo ratings yet
- R5211002-Electrical TechnologyDocument4 pagesR5211002-Electrical TechnologysivabharathamurthyNo ratings yet
- MARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersDocument7 pagesMARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersroorooNo ratings yet
- Sensor Selecccion Magneto-ResistivosDocument10 pagesSensor Selecccion Magneto-ResistivosMarco Martinez SantiagoNo ratings yet
- L1 Water HammerDocument19 pagesL1 Water HammerOPONo ratings yet
- Hydrolics Lab 1 PDFDocument14 pagesHydrolics Lab 1 PDFMahmoudRadiNo ratings yet
- 1D Chain Part BDocument6 pages1D Chain Part Bhaseeb ahmadNo ratings yet
- Project On Optical Fiber: in Partial Fulfilment of The Course PH49006: EM & OPTICS Lab BDocument35 pagesProject On Optical Fiber: in Partial Fulfilment of The Course PH49006: EM & OPTICS Lab BDurgesh JoshiNo ratings yet
- Examples Chap9 2 PDFDocument6 pagesExamples Chap9 2 PDFEmmanuelNo ratings yet
- Inorganic Chapter6 PDFDocument31 pagesInorganic Chapter6 PDFFlorinda BautistaNo ratings yet
- Finite Element Analysis of The Flow Path of Food 3D Printing NozzleDocument6 pagesFinite Element Analysis of The Flow Path of Food 3D Printing NozzleChethan GowdaNo ratings yet
- Consolidarea in TimpDocument9 pagesConsolidarea in TimpBuliga MarianNo ratings yet
- Planning IMI International Pressurization SystemsDocument20 pagesPlanning IMI International Pressurization Systemsjack-bcNo ratings yet
- Disclosure To Promote The Right To InformationDocument22 pagesDisclosure To Promote The Right To InformationSandeep ReddyNo ratings yet
- Vishwakarma Institute of Technology: FF No. 182Document4 pagesVishwakarma Institute of Technology: FF No. 182bharathkumar0310No ratings yet
- Study Guide Work Power and EnergyDocument4 pagesStudy Guide Work Power and Energyapi-259781257No ratings yet
- Symmetry 2Document17 pagesSymmetry 2fitriana dewi kurniawatiNo ratings yet
- Kaznacheev, Trofimov: Introduction To Living Matter and Human ConsciousnessDocument7 pagesKaznacheev, Trofimov: Introduction To Living Matter and Human ConsciousnessBoris Petrovic100% (2)
- Electrostatics: Applied EM by Ulaby, Michielssen and RavaioliDocument60 pagesElectrostatics: Applied EM by Ulaby, Michielssen and RavaioliKamugasha KagonyeraNo ratings yet
- Hess's Law As Chem Tutorial 2 KajanaDocument6 pagesHess's Law As Chem Tutorial 2 KajanaKajana Sivarasa ShenthanNo ratings yet