You might also like
- Comparch 03 CPUDocument85 pagesComparch 03 CPUsewasewtadeleNo ratings yet
- CPU Organization and Instruction Set Design FactorsDocument40 pagesCPU Organization and Instruction Set Design FactorsKirubel EsayasNo ratings yet
- Unit 2Document24 pagesUnit 2zccoffin007No ratings yet
- CA Unit I Overview & InstructionsDocument125 pagesCA Unit I Overview & Instructionsbalaji bala100% (1)
- CAO Unit 1 Part 2-1Document5 pagesCAO Unit 1 Part 2-1prut.joshNo ratings yet
- 2 Marks Que &ansDocument30 pages2 Marks Que &ansKanthimathi SureshNo ratings yet
- 8086 Microprocessor Programming & Instruction Sets:: Immediate AddressingDocument8 pages8086 Microprocessor Programming & Instruction Sets:: Immediate AddressingbiniamNo ratings yet
- AnnaDocument73 pagesAnnaDriti DasNo ratings yet
- ITEC582 Chapter 12Document57 pagesITEC582 Chapter 12linhnmhe172617No ratings yet
- COA Assignment 02 instruction formatsDocument7 pagesCOA Assignment 02 instruction formatsSrushti vinod FuldeoreNo ratings yet
- AssembyDocument57 pagesAssembyOmar KamilNo ratings yet
- DPCO Unit3 2mark Q&ADocument11 pagesDPCO Unit3 2mark Q&Akanimozhi rajasekarenNo ratings yet
- Dpco Unit 3Document16 pagesDpco Unit 3pl.babyshalini palanisamyNo ratings yet
- 2 Marks With AnswersDocument14 pages2 Marks With Answersprisci_durai83% (6)
- Adhiparasakthi College of Engineering, G.B.Nagar, KalavaiDocument19 pagesAdhiparasakthi College of Engineering, G.B.Nagar, KalavaiNandha KumarNo ratings yet
- Isa 1Document13 pagesIsa 1awais_alii56No ratings yet
- Instruction Format and Addressing ModesDocument15 pagesInstruction Format and Addressing Modesmadhurimapatra198788% (33)
- The Central Processing Unit 3.1 Computer Arithmetic 3.1.1 The Arithmetic and Logic Unit (ALU)Document12 pagesThe Central Processing Unit 3.1 Computer Arithmetic 3.1.1 The Arithmetic and Logic Unit (ALU)Tamene TekileNo ratings yet
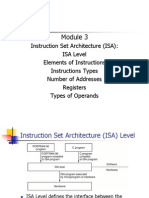
- Module3 ISADocument51 pagesModule3 ISAwatsontamilNo ratings yet
- cs2304 System Software 2 Marks and 16 Marks With AnswerDocument18 pagescs2304 System Software 2 Marks and 16 Marks With Answermanojkumar024No ratings yet
- COA_I_Unit_QADocument9 pagesCOA_I_Unit_QAdineshgandrakotiNo ratings yet
- Midterm CADocument5 pagesMidterm CAKashan AhmedNo ratings yet
- Instruction SetDocument5 pagesInstruction SetSaad SaeedNo ratings yet
- Computer Architecture 2 MarksDocument32 pagesComputer Architecture 2 MarksArchanavgs0% (1)
- Chapter 2 the Centeral Processing UnitDocument106 pagesChapter 2 the Centeral Processing UnitDereje GizawNo ratings yet
- CS6303 Computer Architecture Instruction Set and Addressing ModesDocument16 pagesCS6303 Computer Architecture Instruction Set and Addressing ModesGreenkings100% (1)
- COA Unit 3Document52 pagesCOA Unit 3guptakrishns23No ratings yet
- Machine Instruction SetsDocument44 pagesMachine Instruction SetsAlprinces RespicioNo ratings yet
- Instruction Set and Addressing ModesDocument14 pagesInstruction Set and Addressing ModesAastha KohliNo ratings yet
- Question Bank For Computer ArchitectureDocument23 pagesQuestion Bank For Computer ArchitecturesuryaNo ratings yet
- System Software ToolsDocument9 pagesSystem Software ToolsClashing with DeepakNo ratings yet
- 1.4.3 The Processor's Instruction SetDocument6 pages1.4.3 The Processor's Instruction SettalentNo ratings yet
- Instruction Formats ExplainedDocument5 pagesInstruction Formats ExplainedPragya SinghNo ratings yet
- RISC vs CISC: Comparing Instruction Set ArchitecturesDocument28 pagesRISC vs CISC: Comparing Instruction Set ArchitecturesAnushiMaheshwariNo ratings yet
- Computer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and FunctionsDocument17 pagesComputer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and Functionsdarwinvargas2011No ratings yet
- Instruction TypesDocument13 pagesInstruction TypesShubham GoswamiNo ratings yet
- MCS-012 Block 3Document94 pagesMCS-012 Block 3Abhishek VeerkarNo ratings yet
- Instruction Set Architecture and DesignDocument27 pagesInstruction Set Architecture and DesignMuckie MarfeNo ratings yet
- CPU Organisation: Instructions and Instruction SequencingDocument30 pagesCPU Organisation: Instructions and Instruction SequencingSamit NagNo ratings yet
- Instruction Sequencing and Processor ArchitectureDocument25 pagesInstruction Sequencing and Processor Architecturesamueljamespeter100% (4)
- Addressing Modes and Machine LanguageDocument7 pagesAddressing Modes and Machine LanguagelogicballiaNo ratings yet
- COA Unit3 NotesDocument47 pagesCOA Unit3 Notesindia16112003nationNo ratings yet
- Unit 3 - Computer Architecture - WWW - Rgpvnotes.inDocument14 pagesUnit 3 - Computer Architecture - WWW - Rgpvnotes.inNathuram GodseNo ratings yet
- COMM111 Instruction Set ArchitectureDocument31 pagesCOMM111 Instruction Set Architecturetb193448No ratings yet
- CS1203-SYSTEM SOFTWAREDocument31 pagesCS1203-SYSTEM SOFTWAREMohammed HashimNo ratings yet
- SS Question BankssDocument72 pagesSS Question BankssAdvika RoyNo ratings yet
- CS6303 Computer Architecture Regulation 2013 BE-Computer Science and Engineering III Semester 2 Marks Unit-I Overview & InstructionsDocument18 pagesCS6303 Computer Architecture Regulation 2013 BE-Computer Science and Engineering III Semester 2 Marks Unit-I Overview & InstructionssathishNo ratings yet
- COA Question Bank PDFDocument27 pagesCOA Question Bank PDFPoovarasanNo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- Machine Code - WikipediaDocument5 pagesMachine Code - WikipediajoNo ratings yet
- Unit 3: Machine InstructionsDocument16 pagesUnit 3: Machine Instructionsshreya ChauhanNo ratings yet
- System Software 2 Marks Questions: Unit I - IntroductionDocument9 pagesSystem Software 2 Marks Questions: Unit I - IntroductionSreemol RNo ratings yet
- Coa Unit III Part IIDocument23 pagesCoa Unit III Part IIkontham sirisejaNo ratings yet
- Computer Laboratory Manual1Document58 pagesComputer Laboratory Manual1Muhammad Talha AtharNo ratings yet
- System Software 2019Document17 pagesSystem Software 2019SudharshanNo ratings yet
- CPU Instructions, Addressing Modes and FormatsDocument24 pagesCPU Instructions, Addressing Modes and FormatsSny Kumar DeepakNo ratings yet
- Instruction TypesDocument8 pagesInstruction Typestp2006sterNo ratings yet
- University Solved Answers Unit 1 SS (System Software Notes)Document12 pagesUniversity Solved Answers Unit 1 SS (System Software Notes)Vaishnavi Rave100% (1)
- CO_DesignDocument25 pagesCO_Designpandeyjiiiiii995No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Rr410401 Operating SystemsDocument1 pageRr410401 Operating SystemssivabharathamurthyNo ratings yet
- Unit 3Document87 pagesUnit 3guptavikas_1051No ratings yet
- How To Interchange On Delay Timer and OFF Delay Timer in A PLCDocument8 pagesHow To Interchange On Delay Timer and OFF Delay Timer in A PLCkali bangonNo ratings yet
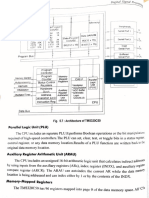
- Tms320c50 ProcessorDocument11 pagesTms320c50 ProcessorKarpagamNo ratings yet
- Airo WizardDocument3 pagesAiro WizardCuma QoNo ratings yet
- Clevo S230-M72SR D02A - SchematicDocument37 pagesClevo S230-M72SR D02A - SchematicRoberto100% (2)
- Testing circuit board layout and component placementDocument1 pageTesting circuit board layout and component placementAndrew NikonovNo ratings yet
- The 8051 Microcontroller Based Embedded SystemsDocument45 pagesThe 8051 Microcontroller Based Embedded Systemsmanishpatel_7950% (8)
- How-To Build A Little Autonomous Robot With PIC 18F4520 PDFDocument22 pagesHow-To Build A Little Autonomous Robot With PIC 18F4520 PDFanselmoNo ratings yet
- 3cf07microprocessor SyllabusDocument1 page3cf07microprocessor SyllabusSumeet PatelNo ratings yet
- Sharp XE-A402 Electronic Cahs Register SMDocument25 pagesSharp XE-A402 Electronic Cahs Register SMDoru RazvanNo ratings yet
- Toshiba - Satellite.l300 L305.Inventec - pt10SC.6050A2170201.Rev.X01.SchematicsDocument63 pagesToshiba - Satellite.l300 L305.Inventec - pt10SC.6050A2170201.Rev.X01.SchematicsramaNo ratings yet
- CD4011BDDocument4 pagesCD4011BDMoltrevNo ratings yet
- Arm Processor ArchitectureDocument84 pagesArm Processor Architecturebhargava PrasadNo ratings yet
- PICPgm - A Free and Simple PIC Development Programmer Software For Free Windows and LinuxDocument17 pagesPICPgm - A Free and Simple PIC Development Programmer Software For Free Windows and LinuxsighbalaNo ratings yet
- DFT Test Point InsertionDocument21 pagesDFT Test Point Insertionnoor_dcetNo ratings yet
- Lab Report 3Document12 pagesLab Report 3NguyễnTuấnAnhNo ratings yet
- s910 SpecsDocument3 pagess910 SpecsFOROWNo ratings yet
- 1.3.1 Logic GatesDocument8 pages1.3.1 Logic GatesismaelNo ratings yet
- Digital Systems Boolean Algebra & Logic GatesDocument3 pagesDigital Systems Boolean Algebra & Logic GatesTuan AnhNo ratings yet
- Fx2n 2ad User S Guide 2ch IDocument8 pagesFx2n 2ad User S Guide 2ch InguyendaibkaNo ratings yet
- Contactless Digital Tachometer Using 8051Document3 pagesContactless Digital Tachometer Using 8051Muhammad JunaidNo ratings yet
- BL24C32Document15 pagesBL24C32no188No ratings yet
- Comparativo TransistoresDocument7 pagesComparativo TransistoresGustavo SanchezNo ratings yet
- Week 4 Assignment Solutions Under 40 CharactersDocument5 pagesWeek 4 Assignment Solutions Under 40 CharactersManaralqamishNo ratings yet
- Ic Logic GatesDocument19 pagesIc Logic GatesDaniDanVlogsNo ratings yet
- CMOS Working Principle and ApplicationsDocument23 pagesCMOS Working Principle and Applicationssachinkumar anjutagiNo ratings yet
- C28x Delfino MDW 8-1Document314 pagesC28x Delfino MDW 8-1Oh NaniNo ratings yet
- User's Manual ET-8LSDDocument5 pagesUser's Manual ET-8LSDRoberto PasicNo ratings yet
- 2 2 Revised r13 SupplyDocument3 pages2 2 Revised r13 SupplyVinay KandulaNo ratings yet