You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Illustrating Arithmetic Sequence: For MATHEMATICS Grade 10 Quarter 1/week 1.bDocument11 pagesIllustrating Arithmetic Sequence: For MATHEMATICS Grade 10 Quarter 1/week 1.bVenice Gwyn ChavezNo ratings yet
- Echofish JRC Jfc-180bbDocument4 pagesEchofish JRC Jfc-180bbJERINsmileNo ratings yet
- Science G6: Quarter 2Document40 pagesScience G6: Quarter 2Frances Datuin100% (1)
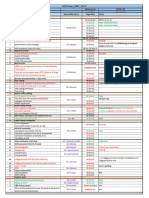
- Hach - MWP (Plan Vs Actual) Status - 22 Oct-1Document1 pageHach - MWP (Plan Vs Actual) Status - 22 Oct-1ankit singhNo ratings yet
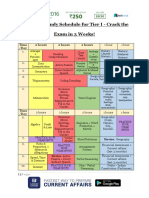
- SSC CHSL Study Schedule For Tier I - Crack The Exam in 3 Weeks!Document3 pagesSSC CHSL Study Schedule For Tier I - Crack The Exam in 3 Weeks!Tushita80% (15)
- Aircraft Strategy and Operations of The Soviet Air Force 1986 CompressDocument280 pagesAircraft Strategy and Operations of The Soviet Air Force 1986 CompressMatthew Guest100% (1)
- Nec Exhibition BrochureDocument4 pagesNec Exhibition BrochurejppullepuNo ratings yet
- Unit 13. Tidy Up!Document10 pagesUnit 13. Tidy Up!Nguyễn Thị Ngọc HuyềnNo ratings yet
- Friday HeatsDocument29 pagesFriday HeatsTGrasley6273No ratings yet
- Evija - Lotus Cars Official WebsiteDocument5 pagesEvija - Lotus Cars Official WebsiteluyuanNo ratings yet
- Global Forecasts DiscussionDocument10 pagesGlobal Forecasts DiscussionkareemarfaNo ratings yet
- Levy - Chapter 4Document48 pagesLevy - Chapter 4ANUPAMA RAMACHANDRANNo ratings yet
- Business Communication - IIDocument3 pagesBusiness Communication - IIprachi100% (1)
- Fundamentals of Software Engineering Course OutlineDocument4 pagesFundamentals of Software Engineering Course Outlinebetelhem yegzawNo ratings yet
- 2019 Admax CataDocument30 pages2019 Admax CataEVENTIA AFRICANo ratings yet
- David Acheson - The Digital Defamation Damages DilemmaDocument16 pagesDavid Acheson - The Digital Defamation Damages DilemmaDavid AchesonNo ratings yet
- Land Laws LAW 446: AssignmentDocument21 pagesLand Laws LAW 446: AssignmentpriyaNo ratings yet
- Identify The Industry - Case 5Document2 pagesIdentify The Industry - Case 5yuki_akitsu0% (1)
- Your Best American GirlDocument9 pagesYour Best American GirlCrystaelechanNo ratings yet
- Pre-Intermediate Tests Audio Script: Track 1Document25 pagesPre-Intermediate Tests Audio Script: Track 1arifsahidNo ratings yet
- 3.6-6kva Battery Cabinet: 1600Xp/1600Xpi SeriesDocument22 pages3.6-6kva Battery Cabinet: 1600Xp/1600Xpi SeriesIsraelNo ratings yet
- Current Logk VkbaDocument8 pagesCurrent Logk Vkba21muhammad ilham thabariNo ratings yet
- Regulations ON Academic Matters: Tezpur UniversityDocument21 pagesRegulations ON Academic Matters: Tezpur UniversitybishalNo ratings yet
- Assignment Marks: 30: InstructionsDocument2 pagesAssignment Marks: 30: InstructionsbishtamitdipNo ratings yet
- Maths Paper 2 June 2001Document11 pagesMaths Paper 2 June 2001Shelin FarmerNo ratings yet
- 13 Datasheet Chint Power Cps Sca5ktl-Psm1-EuDocument1 page13 Datasheet Chint Power Cps Sca5ktl-Psm1-EuMARCOS DANILO DE ALMEIDA LEITENo ratings yet
- Nine Competencies For HR Excellence Cheat Sheet: by ViaDocument1 pageNine Competencies For HR Excellence Cheat Sheet: by ViaRavi KumarNo ratings yet
- Milkfish Tilapia TunaDocument5 pagesMilkfish Tilapia Tunatonbar000No ratings yet
- Biology-Activity-3 - Growth and Development of PlantDocument3 pagesBiology-Activity-3 - Growth and Development of PlantnelleoNo ratings yet
- List of Affilited CollegesDocument28 pagesList of Affilited Collegesuzma nisarNo ratings yet