You might also like
- Yamaha 2015-2016 YZF-R3 Service ManualDocument483 pagesYamaha 2015-2016 YZF-R3 Service ManualChuPepe88% (60)
- Japan's Automakers Face EndakaDocument6 pagesJapan's Automakers Face EndakaN MNo ratings yet
- Scania Truck Abs Ems Fault CodesDocument16 pagesScania Truck Abs Ems Fault CodesSurafel Abebe50% (2)
- STAR Schema for Sales Data MartDocument3 pagesSTAR Schema for Sales Data MartVikas AnandNo ratings yet
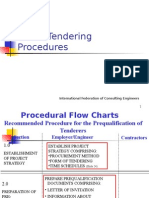
- FIDIC Tendering Procedures: International Federation of Consulting EngineersDocument24 pagesFIDIC Tendering Procedures: International Federation of Consulting EngineersdinaquaNo ratings yet
- PERKINS 1300 Fault Diagnosis - EN - V2-Pages-1-7,9-44Document43 pagesPERKINS 1300 Fault Diagnosis - EN - V2-Pages-1-7,9-44Ali100% (13)
- Geometric Design of Highways and StreetsDocument65 pagesGeometric Design of Highways and StreetsEfrata MulunehNo ratings yet
- Designing HighwayDocument153 pagesDesigning HighwayGraezelNo ratings yet
- Chapter ThreeDocument133 pagesChapter ThreeMamuye Busier YesufNo ratings yet
- DSR 2016 PDFDocument492 pagesDSR 2016 PDFParvathy M RNo ratings yet
- Project Completion Report for Sindh Rural Development ProjectDocument48 pagesProject Completion Report for Sindh Rural Development ProjectAbdull WadoodNo ratings yet
- Relational Model OperationsDocument12 pagesRelational Model OperationsALINo ratings yet
- Bangladesh Armed Forces MES Schedule of Rates 2016Document5 pagesBangladesh Armed Forces MES Schedule of Rates 2016Adam Michael Green0% (1)
- Chapter 3 Geometric Design of HighwayssssDocument161 pagesChapter 3 Geometric Design of HighwayssssAnuwar BuserNo ratings yet
- Cross Sectional Elements of A RoadDocument4 pagesCross Sectional Elements of A RoadAbdur RahmanNo ratings yet
- Persecution of Ahmadis in Pakistan During The Year 2003Document89 pagesPersecution of Ahmadis in Pakistan During The Year 2003ThePersecutionNo ratings yet
- 0 0 8111912121201DPRdesignreportDocument63 pages0 0 8111912121201DPRdesignreportC-06; Ch. AkhilNo ratings yet
- KeNHA Presentation On Tendering RequirementsDocument18 pagesKeNHA Presentation On Tendering Requirementsumernaeem666No ratings yet
- HMA Overlay ProceduresDocument210 pagesHMA Overlay ProceduresAnonymous 4iwNEpaGM1No ratings yet
- P001 NDa TD 0001 R0-KTDocument115 pagesP001 NDa TD 0001 R0-KTchuc_55hk_xdNo ratings yet
- Design Flexible ATJ 5I85 2013 2022Document33 pagesDesign Flexible ATJ 5I85 2013 2022Leediya AfrinaNo ratings yet
- Starting Small Business MBDocument40 pagesStarting Small Business MBnimaaaaaaaNo ratings yet
- Section B - 01 List of DrawingsDocument7 pagesSection B - 01 List of Drawingszayyad hamizanNo ratings yet
- Rate of Shedule M - P - 2009Document393 pagesRate of Shedule M - P - 2009Er Tarun PalNo ratings yet
- Wrking HrsDocument2 pagesWrking HrsNehal ShahNo ratings yet
- Excavators, Construction MachinesDocument19 pagesExcavators, Construction Machinesmansoor azamNo ratings yet
- Guidelines for Economic Analysis of ProjectsDocument215 pagesGuidelines for Economic Analysis of ProjectskszymanskiNo ratings yet
- Highway Geometric Design PrinciplesDocument91 pagesHighway Geometric Design PrinciplesSolomon DesalegnNo ratings yet
- Dbsprojectsvrohith9 170616153525Document22 pagesDbsprojectsvrohith9 170616153525Movies on demandNo ratings yet
- DPR: Detailed Project Reports - NIT Cost Estimate - SOR: Schedule of RatesDocument70 pagesDPR: Detailed Project Reports - NIT Cost Estimate - SOR: Schedule of RatesGirija Sankar PatiNo ratings yet
- Earned Value Management ExplainedDocument26 pagesEarned Value Management ExplainedHedilberto Armando DelgadoNo ratings yet
- Assignment 3 Engineering Project As ContractDocument2 pagesAssignment 3 Engineering Project As ContractAnonymous 7oXNA46xiNNo ratings yet
- Part 1 Vol 1 SWM PDFDocument274 pagesPart 1 Vol 1 SWM PDFSTUPNo ratings yet
- Procurement of Works For Above 6 Million Rupees NCB July 2010Document100 pagesProcurement of Works For Above 6 Million Rupees NCB July 2010jhoward2012npNo ratings yet
- Route 123 Flexible Overlay Design ExampleDocument4 pagesRoute 123 Flexible Overlay Design ExamplePODNo ratings yet
- As Inspected by Mr. N.Dhamarajan Senior Pavement SpecialistDocument14 pagesAs Inspected by Mr. N.Dhamarajan Senior Pavement SpecialistKISHANNo ratings yet
- The CentaurusDocument49 pagesThe CentaurusRehan YousafNo ratings yet
- National Highway Authority Announces Evaluation ReportDocument73 pagesNational Highway Authority Announces Evaluation ReportMunir HussainNo ratings yet
- Value Management PDFDocument3 pagesValue Management PDFManVasNo ratings yet
- 2008 How Contractors Price in RiskDocument15 pages2008 How Contractors Price in RiskindikumaNo ratings yet
- The Complete Guide To Construction Management: Course ManualDocument49 pagesThe Complete Guide To Construction Management: Course ManualJosé Pedro Agonia100% (1)
- Volume-I Part II SpecificationDocument118 pagesVolume-I Part II SpecificationHiren DesaiNo ratings yet
- Standard Biding DocumentDocument137 pagesStandard Biding Documentroom liveNo ratings yet
- AASTHO Design NomographDocument15 pagesAASTHO Design NomographxapaudelNo ratings yet
- Concrete in High-Rise BuildingsDocument6 pagesConcrete in High-Rise BuildingsxeryhoneyNo ratings yet
- Shotcrete For Rock Support ITA-AITES Part A PDFDocument8 pagesShotcrete For Rock Support ITA-AITES Part A PDFwjzabalaNo ratings yet
- National Highway Authority of IndiaDocument195 pagesNational Highway Authority of IndiaRayudu VVSNo ratings yet
- Chief Architect x8 Reference ManualDocument1,366 pagesChief Architect x8 Reference ManualMetalRaT87No ratings yet
- Bid EvaluationDocument21 pagesBid Evaluationpuvitta sudeshilaNo ratings yet
- Steel DeckDocument4 pagesSteel DeckTeodoro Miguel Carlos IsraelNo ratings yet
- Role of consulting engineersDocument2 pagesRole of consulting engineersSuvarnaNo ratings yet
- Highway Surface Drainage System & Problems of Water Logging in Road SectionDocument8 pagesHighway Surface Drainage System & Problems of Water Logging in Road Sectiontheijes100% (2)
- Bim Unit-01 Student Workbook 2011 FINALDocument83 pagesBim Unit-01 Student Workbook 2011 FINALadil271No ratings yet
- Public Works Tender ProcessDocument30 pagesPublic Works Tender ProcessPreetha SreekumarNo ratings yet
- Machinery Cost Calculator: Ag Decision Maker A3-29 - Iowa State University Extension and OutreachDocument3 pagesMachinery Cost Calculator: Ag Decision Maker A3-29 - Iowa State University Extension and OutreachVinod BhaskarNo ratings yet
- Highway Geometric Design ElementsDocument93 pagesHighway Geometric Design ElementsGERA AMITH KUMARNo ratings yet
- Understanding the Building Construction Process: Simply ExplainedFrom EverandUnderstanding the Building Construction Process: Simply ExplainedNo ratings yet
- Road Geometric Design Technical Section: Nrap/Mopw Kabul-AfghanistanDocument70 pagesRoad Geometric Design Technical Section: Nrap/Mopw Kabul-Afghanistananil kalra100% (1)
- CH 3 Geometric DesignDocument79 pagesCH 3 Geometric DesignMadan SunarNo ratings yet
- Construction Technology III: Year 2, Semester I CE 20603Document79 pagesConstruction Technology III: Year 2, Semester I CE 20603IMANDEE JAYNo ratings yet
- Geometric Design of HighwaysDocument80 pagesGeometric Design of Highwaysc/qaadir100% (1)
- Lecture 4: Sight Distance: TR 320 Highway Geometric DesignDocument27 pagesLecture 4: Sight Distance: TR 320 Highway Geometric DesignIsmail A IsmailNo ratings yet
- Module 2 1Document142 pagesModule 2 1Pankaj N ReddyNo ratings yet
- Seminar On Highway Design PDFDocument98 pagesSeminar On Highway Design PDFRey Baguio100% (1)
- Manual de Mecánica Suzuki Vitara 1994Document835 pagesManual de Mecánica Suzuki Vitara 1994pistonjunior123No ratings yet
- OPERATING SAFETY TIPS FOR PNEUMATIC TOOLSDocument6 pagesOPERATING SAFETY TIPS FOR PNEUMATIC TOOLSjordan navarroNo ratings yet
- 501 14 PDFDocument27 pages501 14 PDFTuan Tran100% (1)
- IRF IC Presentation - Webinar 2Document40 pagesIRF IC Presentation - Webinar 2Sathish YANo ratings yet
- FLENDER Standard Couplings: Torsionally Rigid All-Steel Couplings - ARPEX ARP-6 SeriesDocument18 pagesFLENDER Standard Couplings: Torsionally Rigid All-Steel Couplings - ARPEX ARP-6 SeriesNickNo ratings yet
- MAHLE Air-Breather-Filter-Pi-0101-Pi-0185Document12 pagesMAHLE Air-Breather-Filter-Pi-0101-Pi-0185Angel EspinozaNo ratings yet
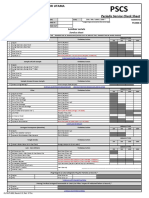
- F-008 - Plta Pscs Pc2000Document6 pagesF-008 - Plta Pscs Pc2000TaufikNo ratings yet
- 2024 Honda CR-V Specifications - enDocument3 pages2024 Honda CR-V Specifications - enAhmed GaballaNo ratings yet
- Honda Accordtourer 2003 5dr K24A3 5AT 24EXEC KeDocument497 pagesHonda Accordtourer 2003 5dr K24A3 5AT 24EXEC KemanuelNo ratings yet
- National Law University Odisha: Analysis of Motor Vehicle Insurance Policies in IndiaDocument14 pagesNational Law University Odisha: Analysis of Motor Vehicle Insurance Policies in IndiaEdwinNo ratings yet
- Rolls Royce Project WDocument11 pagesRolls Royce Project WgordonmenahjNo ratings yet
- Ae Ae Ad Ac Ab Aa Z y X W V U T S R Q P o N M L K J I H G F e D C B ADocument1 pageAe Ae Ad Ac Ab Aa Z y X W V U T S R Q P o N M L K J I H G F e D C B ACRACNo ratings yet
- New 625kva 2806d E18 Tag1aDocument12 pagesNew 625kva 2806d E18 Tag1aRohit BhattNo ratings yet
- 22/0.415 KV, 1000KVA TRANSFORMER Technical Specification: Balmer Lawrie & CoDocument13 pages22/0.415 KV, 1000KVA TRANSFORMER Technical Specification: Balmer Lawrie & Coshan shanzNo ratings yet
- Flare Joints in RacDocument7 pagesFlare Joints in RacRay NamuNo ratings yet
- Deutz 1011 Spec SheetDocument6 pagesDeutz 1011 Spec SheetJulian Alberto AlvarezNo ratings yet
- Mechatronic 2017 PadeepzDocument112 pagesMechatronic 2017 PadeepzSenthil Kumar PNo ratings yet
- Ravenol HCL Sae 5W-30: Application NoteDocument2 pagesRavenol HCL Sae 5W-30: Application NoteAlex OveNo ratings yet
- V H V T H T K K A Ii B T FDocument38 pagesV H V T H T K K A Ii B T FEduardo LozanoNo ratings yet
- Sample 40404Document16 pagesSample 40404Rahul RoyNo ratings yet
- Cut-Pads Distribuidor AP Racing Brake Pads Reference GuideDocument9 pagesCut-Pads Distribuidor AP Racing Brake Pads Reference GuideCentauros BCNo ratings yet
- LP0910WNR: Easy Does ItDocument2 pagesLP0910WNR: Easy Does ItMaricela ZolanoNo ratings yet
- Stair Climbing WheelchairDocument19 pagesStair Climbing WheelchairKIRAN YADAVNo ratings yet
- 1981 FSM All WindsorsDocument46 pages1981 FSM All WindsorsDiego Armando Martinez UrquijoNo ratings yet
- Automotive Engine FundamentalsDocument38 pagesAutomotive Engine FundamentalsSelazinap LptNo ratings yet
- Vehicle Diagnosis SIS/CASDocument10 pagesVehicle Diagnosis SIS/CASrenimoNo ratings yet