You might also like
- Advances in Control Systems: Theory and ApplicationsFrom EverandAdvances in Control Systems: Theory and ApplicationsNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- RL Network: Control Systems Engineering, Fourth Edition by Norman S. NiseDocument33 pagesRL Network: Control Systems Engineering, Fourth Edition by Norman S. NiseEmir ÇokdoğanNo ratings yet
- CH 01Document22 pagesCH 01RhizhailNo ratings yet
- Sistemas de Control: Prof. Dr. João Edgar Chaves Filho Departamento de EletricidadeDocument90 pagesSistemas de Control: Prof. Dr. João Edgar Chaves Filho Departamento de EletricidadeedgfNo ratings yet
- Chap04 NISEDocument58 pagesChap04 NISEDaniel MartínezNo ratings yet
- CH 05Document84 pagesCH 05RhizhailNo ratings yet
- Lect1 Modeling in Frequency DomainDocument39 pagesLect1 Modeling in Frequency Domainaniezahid100% (1)
- ch02 2010Document95 pagesch02 2010edgfNo ratings yet
- Chapter 7: Steady State Error Analysis: Test Waveforms For Evaluating Steady-State Errors of Position Control SystemsDocument9 pagesChapter 7: Steady State Error Analysis: Test Waveforms For Evaluating Steady-State Errors of Position Control Systemsarunkumar SNo ratings yet
- Design of Gain Compensator: DR Mirza Tariq HamayunDocument19 pagesDesign of Gain Compensator: DR Mirza Tariq HamayunAsad RehanNo ratings yet
- CH 01Document17 pagesCH 01Zekeriya TopraklıNo ratings yet
- Figure C-1 (P. 907) : MATLAB Window Showing How To Access Simulink. The Simulink Library Browser Button Is Shown CircledDocument38 pagesFigure C-1 (P. 907) : MATLAB Window Showing How To Access Simulink. The Simulink Library Browser Button Is Shown CircledNani MarisettiNo ratings yet
- Sistemas de Control 1: Diagramas de Bloque y de Flujo Carlos Jo MirandaDocument32 pagesSistemas de Control 1: Diagramas de Bloque y de Flujo Carlos Jo MirandaIssami Cuicapuza SuarezNo ratings yet
- Chapter 8: Root Locus Techniques 1Document42 pagesChapter 8: Root Locus Techniques 1Prabhansh PandeyNo ratings yet
- Sistemas de Control 1: Sistema Análogos Carlos Jo MirandaDocument5 pagesSistemas de Control 1: Sistema Análogos Carlos Jo MirandaJasser Cahui100% (1)
- Microsoft PowerPoint - Lecture 7 - Laplace Transform Rev 25.03.2014Document60 pagesMicrosoft PowerPoint - Lecture 7 - Laplace Transform Rev 25.03.2014Bambang Arie SNo ratings yet
- ELEC3114 Control Systems Lecture 4: Reduction of Multiple SubsystemsDocument49 pagesELEC3114 Control Systems Lecture 4: Reduction of Multiple SubsystemsMartinNo ratings yet
- Chapter 4 Exercise and H.W. AssignmentDocument76 pagesChapter 4 Exercise and H.W. AssignmentMuhammad HasSanNo ratings yet
- GEE338 Problem Set #4 Compensators and PID PDFDocument3 pagesGEE338 Problem Set #4 Compensators and PID PDFAkram KhorsheidNo ratings yet
- Chap 05 BDocument23 pagesChap 05 BRicardo TrejoNo ratings yet
- Figure P2.1: Chapter 2: Modeling in The Frequency Domain 1Document41 pagesFigure P2.1: Chapter 2: Modeling in The Frequency Domain 1CesarNo ratings yet
- Chapter 04Document129 pagesChapter 04Şirin AdaNo ratings yet
- Chapter 13: Digital Control Systems 1Document53 pagesChapter 13: Digital Control Systems 1Cesar100% (1)
- Introduction To Control SystemDocument51 pagesIntroduction To Control SystemNorkarlina Binti Khairul AriffinNo ratings yet
- Chapter 3: Modeling in The Time Domain 1Document34 pagesChapter 3: Modeling in The Time Domain 1CesarNo ratings yet
- An Engineering Method For Safety Region DevelopmentDocument39 pagesAn Engineering Method For Safety Region DevelopmentABCNo ratings yet
- FLab-09 EXP9Document24 pagesFLab-09 EXP9Carl Kevin CartijanoNo ratings yet
- Chapter 3: Time Domain ModelingDocument31 pagesChapter 3: Time Domain ModelingAli IqbalNo ratings yet
- Figure 1-1 (P. 2) : Basic Components of A Control SystemDocument17 pagesFigure 1-1 (P. 2) : Basic Components of A Control SystemAshik AhmedNo ratings yet
- Antenna Azimuth Position Control System: LayoutDocument7 pagesAntenna Azimuth Position Control System: LayoutadalaviNo ratings yet
- Tutorial 1Document27 pagesTutorial 1Jealse100% (1)
- Virtualization and The CloudDocument21 pagesVirtualization and The CloudAli Çakıcı100% (1)
- EE 430 Analogue Control Systems Fall Semester, 2021Document19 pagesEE 430 Analogue Control Systems Fall Semester, 2021Hasten 12gamerNo ratings yet
- Control SystemsDocument61 pagesControl SystemsBaji BabuNo ratings yet
- Ilovepdf - Merged (1) - CompressedDocument128 pagesIlovepdf - Merged (1) - CompressedKakashi HatakeNo ratings yet
- CH 1 Introduction: IME-365-Instrumentation and Control (Spring 2021)Document50 pagesCH 1 Introduction: IME-365-Instrumentation and Control (Spring 2021)Hammad AliNo ratings yet
- Lecture 1 & 2 - 2Document37 pagesLecture 1 & 2 - 2Awais0040% (1)
- Findings With AVC Design For Mitigation of Human Induced Vibrations in Office FloorsDocument9 pagesFindings With AVC Design For Mitigation of Human Induced Vibrations in Office Floorsgorgika papandNo ratings yet
- Name of Faculty-Nn Subject: Control System Subject Code: 5EE3 Branch: EE Most 25 QuestionsDocument5 pagesName of Faculty-Nn Subject: Control System Subject Code: 5EE3 Branch: EE Most 25 QuestionsykjewariaNo ratings yet
- Neural Network Systems Techniques and Applications: Advances in Theory and ApplicationsFrom EverandNeural Network Systems Techniques and Applications: Advances in Theory and ApplicationsNo ratings yet
- Chap 02 ADocument59 pagesChap 02 AJulio MorenoNo ratings yet
- Control Design ProcessDocument9 pagesControl Design ProcessEngr Abdul Wahab KhanNo ratings yet
- Vibration Fundamental - BasicDocument109 pagesVibration Fundamental - Basicpersonalmail_20011078No ratings yet
- Manufacturing Systems: Concurrent Engineering Failure Mode & Effect Analysis (FMEA)Document17 pagesManufacturing Systems: Concurrent Engineering Failure Mode & Effect Analysis (FMEA)Anonymous AjEedIk81No ratings yet
- Reduction of Multiple SubsystemsDocument60 pagesReduction of Multiple SubsystemsRakib HossainNo ratings yet
- Parallel Programming - SlidesDocument268 pagesParallel Programming - SlidesphobosNo ratings yet
- Lecture-01 IntroductionDocument35 pagesLecture-01 Introductionvasu sainNo ratings yet
- Automatic Control Systems by Benjamin C. KuoDocument671 pagesAutomatic Control Systems by Benjamin C. KuoMuhammadFahadIjaz94% (17)
- Jawaharlal Nehru Technological University KakinadaDocument5 pagesJawaharlal Nehru Technological University KakinadaVenkata ReddyNo ratings yet
- BTech 4-1 R07Document6 pagesBTech 4-1 R07kslnNo ratings yet
- Television System MaintenanceDocument292 pagesTelevision System MaintenanceFredji82No ratings yet
- A Case Study On Analytical Analysis of The Inverted Pendulum Real-Time Control SystemDocument54 pagesA Case Study On Analytical Analysis of The Inverted Pendulum Real-Time Control SystemSriram VenkateshanNo ratings yet
- Chapter 5: Reduction of Multiple Subsystems 1Document60 pagesChapter 5: Reduction of Multiple Subsystems 1mnahas84No ratings yet
- Chapter 1Document35 pagesChapter 1Affan MeoNo ratings yet
- Lesson PlanDocument4 pagesLesson Planosmmamhnk66No ratings yet
- BTech 4-1 R07Document6 pagesBTech 4-1 R07Sai SiddhuNo ratings yet
- Em - 1110 1 4010Document286 pagesEm - 1110 1 4010Marcio AlbertoNo ratings yet
- FeedCon (Unit 1)Document10 pagesFeedCon (Unit 1)Melissa LindayagNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityTanvir KaziNo ratings yet
- The US Navy - Fact File - MQ-8C Fire ScoutDocument2 pagesThe US Navy - Fact File - MQ-8C Fire ScoutAleksei KarpaevNo ratings yet
- IMO - PowerpointDocument16 pagesIMO - PowerpointMahen Fernando100% (3)
- Ems Accounting Term 2Document39 pagesEms Accounting Term 2Paballo KoopediNo ratings yet
- 8051 Development Board Circuit DiagramDocument1 page8051 Development Board Circuit DiagramRohan DharmadhikariNo ratings yet
- The Influence of The Transformational LeaderDocument9 pagesThe Influence of The Transformational Leaderkenmuira100% (1)
- Soal Ujian SmaDocument26 pagesSoal Ujian SmaAyu RiskyNo ratings yet
- Ap Human Geography Unit 5Document4 pagesAp Human Geography Unit 5api-287341145No ratings yet
- Modern Theory of Interest: IS-LM CurveDocument36 pagesModern Theory of Interest: IS-LM CurveSouvik DeNo ratings yet
- Spice Board BBLDocument24 pagesSpice Board BBLvenkatpficoNo ratings yet
- RRB NTPC Previous Year Paper 20: WWW - Careerpower.inDocument16 pagesRRB NTPC Previous Year Paper 20: WWW - Careerpower.inSudarshan MaliNo ratings yet
- Reading 36 Using Multifactor Models - AnswersDocument23 pagesReading 36 Using Multifactor Models - Answersdhanh.bdn.hsv.neuNo ratings yet
- Definition of Unit HydrographDocument5 pagesDefinition of Unit HydrographPankaj ChowdhuryNo ratings yet
- HCL Corporate-PresentationDocument14 pagesHCL Corporate-Presentationtony_reddyNo ratings yet
- The World Wide WebDocument22 pagesThe World Wide WebSa JeesNo ratings yet
- Node MCU CarDocument4 pagesNode MCU CarYusuf MuhthiarsaNo ratings yet
- A Laboratory Study of Hot Carbon Dioxide Injection Into Fractured and Conventional CoresDocument13 pagesA Laboratory Study of Hot Carbon Dioxide Injection Into Fractured and Conventional Coresmsmsoft90No ratings yet
- VLLAR2019Document81 pagesVLLAR2019Christian MallorcaNo ratings yet
- LTE ID RNP StandardizationDocument9 pagesLTE ID RNP Standardizationahdanizar100% (1)
- RMU With Eco-Efficient Gas Mixture-Evaluation After Three Years of Field ExperienceDocument5 pagesRMU With Eco-Efficient Gas Mixture-Evaluation After Three Years of Field ExperienceZineddine BENOUADAHNo ratings yet
- Sarcosine MsdsDocument41 pagesSarcosine MsdsAnonymous ZVvGjtUGNo ratings yet
- Cylinder Clamp For N2 Cylinder 84L and FM-200 Cylinder 82.5LDocument1 pageCylinder Clamp For N2 Cylinder 84L and FM-200 Cylinder 82.5LNguyễn Minh ThiệuNo ratings yet
- Is 3073Document34 pagesIs 3073rohan sharmaNo ratings yet
- Quick Commerce:: The Real Last MileDocument9 pagesQuick Commerce:: The Real Last MileChhavi KhandujaNo ratings yet
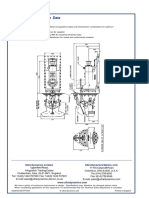
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- Corality ModelOff Sample Answer Hard TimesDocument81 pagesCorality ModelOff Sample Answer Hard TimesserpepeNo ratings yet
- Difference Between Art. 128 and 129 of The Labor CodeDocument3 pagesDifference Between Art. 128 and 129 of The Labor CodeKarl0% (1)
- Technical Schedule World BankDocument249 pagesTechnical Schedule World BankPramod ShastryNo ratings yet
- Brick Bonding AssignmentDocument4 pagesBrick Bonding AssignmentNija AsifNo ratings yet
- Questionnaire On EthnocentrismDocument14 pagesQuestionnaire On Ethnocentrismkalpa vrikshaNo ratings yet
- Teit Cbgs Dmbi Lab Manual FH 2015Document60 pagesTeit Cbgs Dmbi Lab Manual FH 2015Soumya PandeyNo ratings yet