You might also like
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsFrom EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (9)
- Apple Arcade Asset Kit OCT2020Document15 pagesApple Arcade Asset Kit OCT2020raw rajNo ratings yet
- Developers GuideDocument100 pagesDevelopers GuideRobson SpricigoNo ratings yet
- PDMS PML Manual - 1Document100 pagesPDMS PML Manual - 1Sargunam Sankaravadivel82% (11)
- CENTUM CS 3000 R3.ppsxDocument49 pagesCENTUM CS 3000 R3.ppsxSamee UllahNo ratings yet
- Comunicaciones UnitronicsDocument47 pagesComunicaciones UnitronicsUcayaliAlDiaNo ratings yet
- Unit1 2Document30 pagesUnit1 2CHETAN SETIYANo ratings yet
- Scada Protocols and Communication Trends: by Rao KalapatapuDocument11 pagesScada Protocols and Communication Trends: by Rao Kalapataputariq.s8261No ratings yet
- Foundation FieldbusDocument24 pagesFoundation FieldbusSaurabh Varshney100% (1)
- List of Automation Protocols - Wikipedia, The Free EncyclopediaDocument5 pagesList of Automation Protocols - Wikipedia, The Free EncyclopediaArvind KumawatNo ratings yet
- Chartpilot 1100 Manual (New UPDATE 2017)Document442 pagesChartpilot 1100 Manual (New UPDATE 2017)Buzatu Mircea100% (6)
- What Is A Distributed Control System?Document62 pagesWhat Is A Distributed Control System?Kharol A. Bautista100% (1)
- Industrial Communication NetworksDocument20 pagesIndustrial Communication Networksabdel taibNo ratings yet
- Industrial Automation Communication ProtocolsDocument7 pagesIndustrial Automation Communication ProtocolsNeshvar DmitriNo ratings yet
- Programmable Logic Controllers, Industrial Field Buses and SCADADocument45 pagesProgrammable Logic Controllers, Industrial Field Buses and SCADAZeeshan MahmoodNo ratings yet
- Experion FTE PDFDocument6 pagesExperion FTE PDFNguyen Tuan DanhNo ratings yet
- Communication Protocols PDFDocument14 pagesCommunication Protocols PDFChethan SNo ratings yet
- Centum CS 3000 DCS Training ModuleDocument45 pagesCentum CS 3000 DCS Training Modulepuneet kumarNo ratings yet
- The Internet of Things: Key Applications and ProtocolsFrom EverandThe Internet of Things: Key Applications and ProtocolsRating: 5 out of 5 stars5/5 (1)
- PLCDocument78 pagesPLCAbid ParwezNo ratings yet
- Tutorial On PLCDocument33 pagesTutorial On PLCmanojnancyNo ratings yet
- Ovation Ethernet Link Controller ModuleDocument5 pagesOvation Ethernet Link Controller Modulekaicyem100% (1)
- Legacy ManualDocument72 pagesLegacy ManualJorgeMartinezNo ratings yet
- Fault Tolerant Ethernet Delivers Robust Networking Solution For Experion PKSDocument6 pagesFault Tolerant Ethernet Delivers Robust Networking Solution For Experion PKSKhalid AliNo ratings yet
- Fieldbus: For Central ControlDocument85 pagesFieldbus: For Central ControlCastañeda ValeriaNo ratings yet
- Fieldbus: For Central ControlDocument85 pagesFieldbus: For Central ControlJulian LajaraNo ratings yet
- FBus HE01Document23 pagesFBus HE01Ivy NingalNo ratings yet
- Input and Output ProcessingDocument5 pagesInput and Output ProcessingJannaRica BeasonNo ratings yet
- PLCDocument12 pagesPLCSri KanthNo ratings yet
- 02 DCS Architecture IODocument10 pages02 DCS Architecture IOJOSEPH LORENZ RODRIGUEZNo ratings yet
- Pmma 3Document8 pagesPmma 3MancamiaicuruNo ratings yet
- Automation Unit - 5Document23 pagesAutomation Unit - 5Uday Can CanNo ratings yet
- Module 1Document22 pagesModule 1Sebastião Filipe Intimorato ManuelNo ratings yet
- Gwy 100Document4 pagesGwy 100Maitry ShahNo ratings yet
- The Basics of Fieldbus: Technical Data SheetDocument4 pagesThe Basics of Fieldbus: Technical Data Sheetcharro1623No ratings yet
- Special Function IODocument31 pagesSpecial Function IOِAbdul-Rahman Al-magidiNo ratings yet
- APACS Architecture PDFDocument12 pagesAPACS Architecture PDFYawarNo ratings yet
- Seminar On: BY Pradnya GhawalkarDocument21 pagesSeminar On: BY Pradnya GhawalkarpradnyaghawalkarNo ratings yet
- Networks in Process AutomationDocument24 pagesNetworks in Process AutomationRajeshNo ratings yet
- TheMaintGuide FieldcommDocument7 pagesTheMaintGuide Fieldcommaromero888No ratings yet
- Introduction To FieldbusDocument4 pagesIntroduction To FieldbusjamesrickynNo ratings yet
- 140 Avi 030 00Document40 pages140 Avi 030 00Sergio Mauricio Acuña BravoNo ratings yet
- 140 CRP 932 00Document124 pages140 CRP 932 00Htnakirhs TryNo ratings yet
- H0 ECOM100 Spec EngDocument2 pagesH0 ECOM100 Spec EngKwameOpareNo ratings yet
- Siemens Profibus 1Document34 pagesSiemens Profibus 1Miguel AngelNo ratings yet
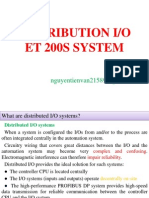
- Distribution I/O Et 200S SystemDocument22 pagesDistribution I/O Et 200S Systemavandetq15No ratings yet
- 140 Cpu 434 12aDocument190 pages140 Cpu 434 12amiguelmed21No ratings yet
- CPX enDocument240 pagesCPX enram modwadiaNo ratings yet
- Report On Industrial VisitDocument3 pagesReport On Industrial Visitnikhilnv123100% (2)
- Vehicle Bus Standards. Basics of Can & Its Interface With LabviewDocument31 pagesVehicle Bus Standards. Basics of Can & Its Interface With Labviewpradeeppatel.k018No ratings yet
- LM18Document4 pagesLM18DHANASEKAR RNo ratings yet
- FF Applications in IntoolsDocument50 pagesFF Applications in IntoolsOmprakash_janaNo ratings yet
- The Abcs of Selecting The Proper Industrial Ethernet SwitchDocument4 pagesThe Abcs of Selecting The Proper Industrial Ethernet SwitchBob YuNo ratings yet
- Introduction To PLCsDocument49 pagesIntroduction To PLCsvishwa9No ratings yet
- 10 Industrial Automation 18MTE PLC Data Communication FieldBusDocument37 pages10 Industrial Automation 18MTE PLC Data Communication FieldBusSiraj AhmedNo ratings yet
- Industrial NetDocument18 pagesIndustrial NetMOUSIN PASHANo ratings yet
- Combined ComponentsDocument5 pagesCombined ComponentsunicornmepNo ratings yet
- Practical Guide For Remote Access To Plant Equipment 44Document1 pagePractical Guide For Remote Access To Plant Equipment 44felix revoredoNo ratings yet
- Es Notes Unit 3Document7 pagesEs Notes Unit 3Sai ReddyNo ratings yet
- Gpib and Ieee 488Document17 pagesGpib and Ieee 488communicationridersNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- Mac Snake Game ProjectDocument33 pagesMac Snake Game ProjectMack PraiseNo ratings yet
- Textile Shop Management SystemDocument51 pagesTextile Shop Management System19MSS041 Selva ganapathy K100% (2)
- Identify Your MacBook Air Model - Apple Support (PH)Document8 pagesIdentify Your MacBook Air Model - Apple Support (PH)antonnel.wrkNo ratings yet
- ICT 3030 Educational Technology and Teaching Methods KELVIN MUKWAZO PRESENTATIONDocument20 pagesICT 3030 Educational Technology and Teaching Methods KELVIN MUKWAZO PRESENTATIONkelvin mukwazoNo ratings yet
- Citrix-Ready Autocad Map 3D Installation and Setup GuideDocument18 pagesCitrix-Ready Autocad Map 3D Installation and Setup GuidesyafraufNo ratings yet
- Lab14 - Design Patterns (Observer&Decorator)Document43 pagesLab14 - Design Patterns (Observer&Decorator)Jinwoo SongNo ratings yet
- Solaris Raidctl Create LunDocument75 pagesSolaris Raidctl Create Lunc154333No ratings yet
- Design Pattern Mock Test IIDocument7 pagesDesign Pattern Mock Test IIAdhara MukherjeeNo ratings yet
- Linux PermissionDocument49 pagesLinux PermissionnyeinlwinooNo ratings yet
- Media On The Android Platform: March 6, 2010 Jason ShahDocument35 pagesMedia On The Android Platform: March 6, 2010 Jason ShahjsdfllcNo ratings yet
- How To Combine Two (Or More) Excel Spreadsheets TogetherDocument15 pagesHow To Combine Two (Or More) Excel Spreadsheets TogetherMr Z KhanNo ratings yet
- MP7600 Maintenance Manual - 302399FDocument54 pagesMP7600 Maintenance Manual - 302399FRicardo Torres ZamudioNo ratings yet
- Image Classification Using Pre-Trained Convolutional Neural Network in COLABDocument6 pagesImage Classification Using Pre-Trained Convolutional Neural Network in COLABGRD JournalsNo ratings yet
- Unit-1 HTMLDocument45 pagesUnit-1 HTMLKiran KumarNo ratings yet
- Syllabus - CS2318 Section 251 Spring 2021Document7 pagesSyllabus - CS2318 Section 251 Spring 2021David KimNo ratings yet
- Uml Fundamentals: Adopted From Dr. ErnestDocument195 pagesUml Fundamentals: Adopted From Dr. ErnestTemuNo ratings yet
- Chapter 5 Service Program: November 2012 XP Series S/MDocument67 pagesChapter 5 Service Program: November 2012 XP Series S/MspirisNo ratings yet
- Worksheet No.1: Grade 10Document11 pagesWorksheet No.1: Grade 10Reymon Velasco PanginenNo ratings yet
- OPSunit 1&2Document9 pagesOPSunit 1&2Davis ArnoldNo ratings yet
- CBSE Class 4 Computers AssignmentDocument3 pagesCBSE Class 4 Computers AssignmentWaseem Al-HassanNo ratings yet
- Technical Handy Guide: MX-2640N MX-3140N MX-3640NDocument71 pagesTechnical Handy Guide: MX-2640N MX-3140N MX-3640NPrint Alto RendimientoNo ratings yet
- Roof Con/Truss Con-Manual For BeginnersDocument24 pagesRoof Con/Truss Con-Manual For BeginnersDaniel DincaNo ratings yet
- Splunk UserDocument11 pagesSplunk UseracmeNo ratings yet
- Petrel 2014 Installation GuideDocument96 pagesPetrel 2014 Installation GuideAngie Carolina Rodriguez MeloNo ratings yet
- Darul Hikma UniversityDocument14 pagesDarul Hikma UniversityabdiazizNo ratings yet
- SM-T22X UM EU RR Eng Rev.1.0 210428Document99 pagesSM-T22X UM EU RR Eng Rev.1.0 210428Rodolfo Gomes Da SilvaNo ratings yet