You might also like
- Chapter 3 Memory Management-1Document44 pagesChapter 3 Memory Management-1Brian MutukuNo ratings yet
- Ch. 4-MemoryManagement PDFDocument42 pagesCh. 4-MemoryManagement PDFmikiasNo ratings yet
- Memory ManagementDocument33 pagesMemory ManagementlalithaNo ratings yet
- Memory Management: Operating Systems: Internals and Design Principles, 6/EDocument42 pagesMemory Management: Operating Systems: Internals and Design Principles, 6/ENancy Jerlin JosephNo ratings yet
- Chapter07-Memory ManagementDocument42 pagesChapter07-Memory ManagementRam RajputNo ratings yet
- Memory Management: Operating Systems: Internals and Design Principles, 6/EDocument132 pagesMemory Management: Operating Systems: Internals and Design Principles, 6/ERockyKingstonNo ratings yet
- OS Memory Management: Key Concepts ExplainedDocument27 pagesOS Memory Management: Key Concepts ExplainedAmir AmjadNo ratings yet
- Chapter 07Document35 pagesChapter 07Arun Kumar MANo ratings yet
- Lecture 11Document12 pagesLecture 11api-3801184No ratings yet
- Main MemoryDocument57 pagesMain MemoryBilal WarraichNo ratings yet
- Chapter 8: Memory ManagementDocument51 pagesChapter 8: Memory ManagementRashi KumariNo ratings yet
- UNIT IV - Compatibility ModeDocument77 pagesUNIT IV - Compatibility ModeRudraksh sahNo ratings yet
- Memory ManagmentDocument75 pagesMemory Managmentbinakasehun2026No ratings yet
- OS - Lect 5Document43 pagesOS - Lect 5aehab1912No ratings yet
- 9_OS_Memory_1Document25 pages9_OS_Memory_1hasnaatdon1No ratings yet
- Chapter-8 (Memory Management)Document42 pagesChapter-8 (Memory Management)Ar. RajaNo ratings yet
- CS4310 MemoryManagementDocument40 pagesCS4310 MemoryManagementtototoNo ratings yet
- Chapters 7 & 8 Memory Management: Operating Systems: Internals and Design Principles, 6/EDocument96 pagesChapters 7 & 8 Memory Management: Operating Systems: Internals and Design Principles, 6/EBapuji ValabojuNo ratings yet
- Main Memory: Basic HardwareDocument16 pagesMain Memory: Basic HardwareHarshith BejjamNo ratings yet
- UNIT-3 What Does It Mean by Memory Management Unit?Document15 pagesUNIT-3 What Does It Mean by Memory Management Unit?Alwin HiltonNo ratings yet
- Os Chap2Document69 pagesOs Chap2amsalu alemuNo ratings yet
- Chapter 07Document25 pagesChapter 07Fauzan PrasetyoNo ratings yet
- MEMORY MANAGEMENT TERMS AND CONCEPTSDocument41 pagesMEMORY MANAGEMENT TERMS AND CONCEPTSGaytri DhingraNo ratings yet
- Memory Management TechniquesDocument34 pagesMemory Management TechniquesGhumti Duniyan superstarsNo ratings yet
- Memory Management Techniques in 4 StepsDocument15 pagesMemory Management Techniques in 4 StepsHabtieNo ratings yet
- Operating System _Memory Management StrategiesDocument59 pagesOperating System _Memory Management StrategiesSanthosh SgraoNo ratings yet
- Main MeDocument26 pagesMain MeCarabNo ratings yet
- Main Memory: IS104 Operating Systems ConceptDocument62 pagesMain Memory: IS104 Operating Systems ConceptGABRIEL BUFFON HARAHAP (00000061688)No ratings yet
- Chapter-8 Instructor: Mr. Tayyeb Javed: Operating System Memory ManagementDocument54 pagesChapter-8 Instructor: Mr. Tayyeb Javed: Operating System Memory Managementtalha sheikhNo ratings yet
- Lect 6 OSDocument28 pagesLect 6 OSChogeNo ratings yet
- Memory2 PDFDocument93 pagesMemory2 PDFvidishsaNo ratings yet
- Operating Systems: Prof. Navneet Goyal Department of Computer Science & Information Systems BITS, PilaniDocument36 pagesOperating Systems: Prof. Navneet Goyal Department of Computer Science & Information Systems BITS, PilanidevitoshNo ratings yet
- Memory Management in OSDocument76 pagesMemory Management in OSratanNo ratings yet
- Overlay and virtual memory techniquesDocument22 pagesOverlay and virtual memory techniquessanta55No ratings yet
- Chapt 2Document98 pagesChapt 2Shalinie Anbu ChelianNo ratings yet
- Memory ManagementDocument71 pagesMemory ManagementRaza AhmadNo ratings yet
- Spos Unit 6Document133 pagesSpos Unit 6lokeshpatil977No ratings yet
- Ex 8Document54 pagesEx 8rahul_agrawal165No ratings yet
- Memory Management TechniquesDocument57 pagesMemory Management Techniques1nshsankritNo ratings yet
- Chapter4-Memory ManagementDocument35 pagesChapter4-Memory ManagementPrathameshNo ratings yet
- Unit 4 NotesDocument36 pagesUnit 4 NotesHare Ram SinghNo ratings yet
- OS Lec 9 & 10Document25 pagesOS Lec 9 & 10HasnainNo ratings yet
- Lecture Memory RemovedDocument33 pagesLecture Memory RemovedMohamad YassineNo ratings yet
- Lecture MemoryDocument55 pagesLecture MemoryMohamad YassineNo ratings yet
- Memory Management TechniquesDocument47 pagesMemory Management TechniquesBijal patelNo ratings yet
- Interrupt and Memory HierarchyDocument32 pagesInterrupt and Memory HierarchyJam Farhad AtharNo ratings yet
- 5.memory ManagementDocument20 pages5.memory ManagementNisarg GugaleNo ratings yet
- Chapter - 5 - Memory Management and IO ManagementDocument18 pagesChapter - 5 - Memory Management and IO ManagementNabaa 'Abdallah Salim Al SanidiaNo ratings yet
- Os Unit IvDocument62 pagesOs Unit IvYuvaraj V, Assistant Professor, BCANo ratings yet
- Chapter Five - Memory ManagmentpDocument57 pagesChapter Five - Memory ManagmentpThe True TomNo ratings yet
- Os - 8-9Document22 pagesOs - 8-9StupefyNo ratings yet
- Unit 5Document47 pagesUnit 5gdzqxjgomvnldysggkNo ratings yet
- Ru CS Os 05Document42 pagesRu CS Os 05lutfullahNo ratings yet
- 3.memory Management - 20240103Document157 pages3.memory Management - 20240103prototypes6341No ratings yet
- MITC101Document42 pagesMITC101Rapchel EstrellaNo ratings yet
- Operating Systems Notes: 1. What Is An OS (P5)Document34 pagesOperating Systems Notes: 1. What Is An OS (P5)Jordas AndreiNo ratings yet
- 3.memory Management 20240103Document41 pages3.memory Management 20240103prototypes6341No ratings yet
- MemoryManagement PDFDocument44 pagesMemoryManagement PDFalihamzaNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- IOT Based Electrical Switching Circuit For The Safety of Human and Electrical SystemDocument4 pagesIOT Based Electrical Switching Circuit For The Safety of Human and Electrical SystemIJRASETPublicationsNo ratings yet
- Moxa TCP Client Mode For Nport Tech Note v1.0Document4 pagesMoxa TCP Client Mode For Nport Tech Note v1.0Ishak IbrahimNo ratings yet
- IRS-Class - Unit-3Document95 pagesIRS-Class - Unit-3pooja.dNo ratings yet
- ADEA AADSAS General Instructions BookletDocument53 pagesADEA AADSAS General Instructions Bookletd_yuminNo ratings yet
- Manual BluegriffonDocument49 pagesManual BluegriffonestudiocodecNo ratings yet
- Dhi Nvr1104hs P s3 HDocument2 pagesDhi Nvr1104hs P s3 HItalo Vicente Luis Ferrara BastardoNo ratings yet
- Palm Desktop Win 62Document2 pagesPalm Desktop Win 62Anonymous ZYnFxuRNo ratings yet
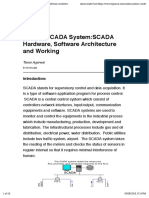
- What Is SCADA System-SCADA Hardware, Software Architecture and WorkingDocument10 pagesWhat Is SCADA System-SCADA Hardware, Software Architecture and WorkingMohd Ismail YusofNo ratings yet
- 1.master Dug Hardware Failure:: Configure One of Slave Dugs As A Master. Not Doing So, Increases TheDocument2 pages1.master Dug Hardware Failure:: Configure One of Slave Dugs As A Master. Not Doing So, Increases TheDave100% (1)
- Smart Manager With Data Analyzer Engineering BookDocument339 pagesSmart Manager With Data Analyzer Engineering BookBCINo ratings yet
- ISTQB Certified Tester Foundation Level: - Module 4 of 6: Test Design TechniquesDocument81 pagesISTQB Certified Tester Foundation Level: - Module 4 of 6: Test Design TechniquesSantosh Rathod100% (1)
- Assessment of Different OPC UA ImplementationsDocument10 pagesAssessment of Different OPC UA ImplementationsElven KimNo ratings yet
- Mecmesin Accessories CatalogueDocument374 pagesMecmesin Accessories CatalogueAleksandr MihaylovNo ratings yet
- Adrv9008 1Document68 pagesAdrv9008 1doubleNo ratings yet
- Service Manual PDFDocument721 pagesService Manual PDFReneeNo ratings yet
- Studen Record System Project ReportDocument17 pagesStuden Record System Project ReportHITENDRA PENDAM0% (1)
- Fake Review Detection Iee PaperDocument4 pagesFake Review Detection Iee Paperapeksha SiddramNo ratings yet
- Hpfs Vend/ Retail Application Presentation: K Srinivas Krishna USC Holograms Pvt. LTD (Project Company)Document24 pagesHpfs Vend/ Retail Application Presentation: K Srinivas Krishna USC Holograms Pvt. LTD (Project Company)Dasthagiri GiriNo ratings yet
- KPSC - QP - 145-15Document12 pagesKPSC - QP - 145-15M UllerNo ratings yet
- Unit 6: Detailed Look at SAP Cloud Transport Management (CTMS)Document11 pagesUnit 6: Detailed Look at SAP Cloud Transport Management (CTMS)sriramojNo ratings yet
- TZERO White PaperDocument27 pagesTZERO White PaperFran Frankel92% (13)
- Student Login Naviance HtmsDocument2 pagesStudent Login Naviance Htmsapi-558097721No ratings yet
- Topic 1 UBD2012 Introduction To Digital TalentDocument8 pagesTopic 1 UBD2012 Introduction To Digital TalentEcah HyraaNo ratings yet
- Applied Statistics and The SAS ProgrammingDocument85 pagesApplied Statistics and The SAS Programminganugupta.wj9719100% (1)
- LinuxDocument13 pagesLinuxTECHNICAL ANONYMOUSNo ratings yet
- Construction Materials Pricelist in PhilippinesDocument19 pagesConstruction Materials Pricelist in Philippinesabu zam manangan80% (15)
- 3HAC060860 PM OmniCore C30-EnDocument606 pages3HAC060860 PM OmniCore C30-EnLucas SilvaNo ratings yet
- KOKUYO CAMLIN LIMITED 73rd ANNUAL REPORT 2019-20 HighlightsDocument128 pagesKOKUYO CAMLIN LIMITED 73rd ANNUAL REPORT 2019-20 HighlightsManish NagdevNo ratings yet
- Laptops and PCs from TIENDA LUZ under 40 charactersDocument158 pagesLaptops and PCs from TIENDA LUZ under 40 charactersIgnacio Ocacio CabreraNo ratings yet
- E90-DTU (900SL22-GPRS) +usermanual EN v1.00Document20 pagesE90-DTU (900SL22-GPRS) +usermanual EN v1.00Wasang Juwi PracihnoNo ratings yet