You might also like
- Multilayer Percept RonDocument50 pagesMultilayer Percept RonBhavana AkkirajuNo ratings yet
- Neuron Model: Sigmoidal FunctionDocument15 pagesNeuron Model: Sigmoidal FunctionPooja PatwariNo ratings yet
- L3 BackpropagationDocument61 pagesL3 BackpropagationAlimohd AslamNo ratings yet
- Automatic Generation Control Using Artificial Neural Networks - HarkiratDocument47 pagesAutomatic Generation Control Using Artificial Neural Networks - Harkiratmalini72No ratings yet
- Foundations of Machine Learning: Module 6: Neural NetworkDocument14 pagesFoundations of Machine Learning: Module 6: Neural NetworkNishant TiwariNo ratings yet
- Learning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Document59 pagesLearning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Mohammad Al SamhouriNo ratings yet
- Lecture Four Multi-Layer Perceptron: Design and Training IssuesDocument69 pagesLecture Four Multi-Layer Perceptron: Design and Training IssuesWantong LiaoNo ratings yet
- LMS Algorithm OptimizationDocument16 pagesLMS Algorithm OptimizationterrorindarknessNo ratings yet
- Introduction to Artificial Neural NetworksDocument18 pagesIntroduction to Artificial Neural NetworksHuỳnhĐứcTríNo ratings yet
- Artificial Neural Network Lecture Module 22Document54 pagesArtificial Neural Network Lecture Module 22Ninni SinghNo ratings yet
- Neural Network and Fuzzy LogicDocument54 pagesNeural Network and Fuzzy Logicshreyas sr100% (1)
- Highly Interconnected Processing Elements: 1. Neural Network ArchitecturesDocument7 pagesHighly Interconnected Processing Elements: 1. Neural Network ArchitecturesMD AJMALNo ratings yet
- Learning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007Document31 pagesLearning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007paku deyNo ratings yet
- ECE411 - 4c - The Z-Transform - Problem Set 1Document2 pagesECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezNo ratings yet
- Lecture 4 - 2007 - Backpropagation - (HINTON)Document60 pagesLecture 4 - 2007 - Backpropagation - (HINTON)alan1966No ratings yet
- Busiess Analytics Data Mining Lecture 7Document37 pagesBusiess Analytics Data Mining Lecture 7utkarsh bhargavaNo ratings yet
- ErrorDocument24 pagesErrornourhan fahmyNo ratings yet
- Introduction To Neural Networks: Revision Lectures: © John A. Bullinaria, 2004Document24 pagesIntroduction To Neural Networks: Revision Lectures: © John A. Bullinaria, 2004basela2010No ratings yet
- Artificial Neural NetworkDocument16 pagesArtificial Neural Networkmk100% (1)
- NN 2Document42 pagesNN 2Ku LotNo ratings yet
- Associative Memory Networks ExplainedDocument83 pagesAssociative Memory Networks Explainedsabharish varshan410No ratings yet
- Neural Networks: Multi-Layer Perceptrons and BackpropagationDocument35 pagesNeural Networks: Multi-Layer Perceptrons and Backpropagationamjad tamishNo ratings yet
- Deep Learning with Keras and TensorFlow: Build a Neural Network from ScratchDocument77 pagesDeep Learning with Keras and TensorFlow: Build a Neural Network from ScratchVIJENDHER REDDY GURRAMNo ratings yet
- Lec3 BackpropagationDocument13 pagesLec3 BackpropagationNermeen ElsheikhNo ratings yet
- Xor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsDocument12 pagesXor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsRahul SinghNo ratings yet
- Gradient Descent Learning: Minimize Objective Function: Error LandscapeDocument14 pagesGradient Descent Learning: Minimize Objective Function: Error LandscapePooja PatwariNo ratings yet
- Back Propagation in NNDocument30 pagesBack Propagation in NNShubhamNo ratings yet
- UNIT II: Perceptron: Output SumDocument12 pagesUNIT II: Perceptron: Output SumSarmi HarshaNo ratings yet
- Recurrent Neural NetworkDocument81 pagesRecurrent Neural NetworkRivujit DasNo ratings yet
- Neural Networks for Machine Learning: Learning the Weights of a Logistic Output NeuronDocument34 pagesNeural Networks for Machine Learning: Learning the Weights of a Logistic Output NeuronMadhav SharmaNo ratings yet
- Laplace Finite DifferenceDocument5 pagesLaplace Finite DifferenceFarid MorabetNo ratings yet
- L2 Perceptrons, Function Approximation, ClassificationDocument89 pagesL2 Perceptrons, Function Approximation, ClassificationUzair SiddiquiNo ratings yet
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDocument43 pagesArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeUtkarsh AgarwalNo ratings yet
- 02 ANN ArchitectureDocument24 pages02 ANN ArchitectureDewa Bagus KrisnaNo ratings yet
- Neural Networks: Teacher: Elena Marchiori R4.47 Assistant: Kees Jong S2.22Document18 pagesNeural Networks: Teacher: Elena Marchiori R4.47 Assistant: Kees Jong S2.22Hatem FaroukNo ratings yet
- Artifical Neural Networks - Lect - 2Document16 pagesArtifical Neural Networks - Lect - 2ma5395822No ratings yet
- Adaline and MedalineDocument14 pagesAdaline and MedalineBHAVNA AGARWAL50% (2)
- Edge 1 BDocument22 pagesEdge 1 BViswakarma ChakravarthyNo ratings yet
- l15 16 AutoencodersDocument26 pagesl15 16 AutoencodersRajakumar AwaradiNo ratings yet
- Chapter 2 SummaryDocument17 pagesChapter 2 Summaryduraiprakash83No ratings yet
- Single Layer Feedforward NetworksDocument21 pagesSingle Layer Feedforward NetworksAKSHIT MATHUR 15BEC0582No ratings yet
- Abstract Models and Neural Learning RulesDocument31 pagesAbstract Models and Neural Learning Ruleshari pukhaNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument41 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmramnbantunNo ratings yet
- 02 LearningProcessDocument38 pages02 LearningProcessHipiijxsdjNo ratings yet
- ANN3Document13 pagesANN3ARPIT SANJAY AVASARMOL R2566003No ratings yet
- Neural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronDocument34 pagesNeural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronReshma KhemchandaniNo ratings yet
- Ni 6Document40 pagesNi 6Mohammad Al SamhouriNo ratings yet
- FemsahpefuncDocument25 pagesFemsahpefuncshmyeNo ratings yet
- ImageNet Classification With Deep Convolutional Convolutional Neural Networks PDFDocument37 pagesImageNet Classification With Deep Convolutional Convolutional Neural Networks PDFDominicNo ratings yet
- Soft ComputingDocument92 pagesSoft ComputingEco Frnd Nikhil ChNo ratings yet
- ANN 2Document22 pagesANN 2Jeril Joy JosephNo ratings yet
- Linear Separability: OR and AND FunctionsDocument11 pagesLinear Separability: OR and AND FunctionsNetaji GandiNo ratings yet
- Artificial Neural Networks: Dan Simon Cleveland State UniversityDocument44 pagesArtificial Neural Networks: Dan Simon Cleveland State UniversityArioston JúniorNo ratings yet
- System Identification Basics System Identification IsDocument7 pagesSystem Identification Basics System Identification IsAyyar KandasamyNo ratings yet
- Artificial Neural Network Lecture Module 22: Neuron Models and Network ArchitecturesDocument54 pagesArtificial Neural Network Lecture Module 22: Neuron Models and Network ArchitecturesJay AjwaniNo ratings yet
- 5. PerceptronDocument17 pages5. Perceptrongaminghardy4No ratings yet
- Bayesian Networks (Part I) : 10 - 601 Introduction To Machine LearningDocument55 pagesBayesian Networks (Part I) : 10 - 601 Introduction To Machine LearningAbhinandan ChatterjeeNo ratings yet
- Lecture 11Document11 pagesLecture 11AFFIFA JAHAN ANONNANo ratings yet
- Lecture 12Document11 pagesLecture 12AFFIFA JAHAN ANONNANo ratings yet
- Week 5 Problemt SetDocument16 pagesWeek 5 Problemt SetAFFIFA JAHAN ANONNANo ratings yet
- Department Transfer FormDocument2 pagesDepartment Transfer FormAFFIFA JAHAN ANONNANo ratings yet
- Forecast Time Series-NotesDocument138 pagesForecast Time Series-NotesflorinNo ratings yet
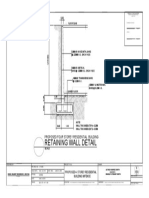
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- SocorexDocument6 pagesSocorexTedosNo ratings yet
- MOW Procurement Management Plan - TemplateDocument7 pagesMOW Procurement Management Plan - TemplateDeepak RajanNo ratings yet
- Malabsorption and Elimination DisordersDocument120 pagesMalabsorption and Elimination DisordersBeBs jai SelasorNo ratings yet
- Compare The Political System of Kazakhstan, USA, UK PresentationDocument19 pagesCompare The Political System of Kazakhstan, USA, UK PresentationAiganym OmiraliNo ratings yet
- Fujitsu Lifebook p1120 ManualDocument91 pagesFujitsu Lifebook p1120 Manualمحمد يحىNo ratings yet
- 6 An Indian American Woman in Space 2Document11 pages6 An Indian American Woman in Space 2Manju YadavNo ratings yet
- 2 Both Texts, and Then Answer Question 1 On The Question Paper. Text A: Esports in The Olympic Games?Document2 pages2 Both Texts, and Then Answer Question 1 On The Question Paper. Text A: Esports in The Olympic Games?...No ratings yet
- Chapter 6 Managing Quality (Sesi 3)Document68 pagesChapter 6 Managing Quality (Sesi 3)Nurmala SariNo ratings yet
- Gen 001 Sas 4Document4 pagesGen 001 Sas 4Michael MarzonNo ratings yet
- Shooting ScriptDocument12 pagesShooting Scriptapi-544851273No ratings yet
- Is Iso 2692-1992Document24 pagesIs Iso 2692-1992mwasicNo ratings yet
- MKTG 2126 - Assignment 3Document2 pagesMKTG 2126 - Assignment 3omar mcintoshNo ratings yet
- Villanueva Poetry Analysis Template BSEE 35Document7 pagesVillanueva Poetry Analysis Template BSEE 35CHRISTIAN MAHINAYNo ratings yet
- Training Report On Machine LearningDocument27 pagesTraining Report On Machine LearningBhavesh yadavNo ratings yet
- Qcs 2010 Section 13 Part 3 Accessories PDFDocument3 pagesQcs 2010 Section 13 Part 3 Accessories PDFbryanpastor106No ratings yet
- cmc2 OiDocument147 pagescmc2 OiJesus Mack GonzalezNo ratings yet
- Introduction To Financial Planning Unit 1Document57 pagesIntroduction To Financial Planning Unit 1Joshua GeddamNo ratings yet
- Summarised Maths Notes (Neilab Osman)Document37 pagesSummarised Maths Notes (Neilab Osman)dubravko_akmacicNo ratings yet
- Joe Ann MarcellanaDocument17 pagesJoe Ann MarcellanarudyNo ratings yet
- BOOK-Deva-Oracle MaterialDocument177 pagesBOOK-Deva-Oracle MaterialPAVANN TNo ratings yet
- Senior High School Tracks: Free Powerpoint Templates Free Powerpoint TemplatesDocument11 pagesSenior High School Tracks: Free Powerpoint Templates Free Powerpoint TemplatesGeraldineNo ratings yet
- HFH ch04Document11 pagesHFH ch04Harikrishan RNo ratings yet
- Twingo 3 & Clio 4Document10 pagesTwingo 3 & Clio 4Alexandre Le GrandNo ratings yet
- Rg213 Rgflex Coax Braided Cable: Product Data Sheet RG213-50JFDocument1 pageRg213 Rgflex Coax Braided Cable: Product Data Sheet RG213-50JFPancho BerríosNo ratings yet
- CHM131 Presentation - Oxidation of MetalsDocument11 pagesCHM131 Presentation - Oxidation of MetalsNazrul ShahNo ratings yet
- NST 021 Orientation SASDocument5 pagesNST 021 Orientation SASLady Mae AguilarNo ratings yet
- KJR 20 880 PDFDocument14 pagesKJR 20 880 PDFNam LeNo ratings yet
- GMS175CSDocument4 pagesGMS175CScorsini999No ratings yet