You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Week 06 Lecture MaterialDocument46 pagesWeek 06 Lecture MaterialMeer HassanNo ratings yet
- Linear Separability and Perceptron Learning in Neural NetworksDocument18 pagesLinear Separability and Perceptron Learning in Neural NetworksshardapatelNo ratings yet
- Artificial Neural NetworksDocument61 pagesArtificial Neural NetworksAshish ShahNo ratings yet
- Single Layer Feedforward NetworksDocument21 pagesSingle Layer Feedforward NetworksAKSHIT MATHUR 15BEC0582No ratings yet
- Abstract Models and Neural Learning RulesDocument31 pagesAbstract Models and Neural Learning Ruleshari pukhaNo ratings yet
- ANN3Document13 pagesANN3ARPIT SANJAY AVASARMOL R2566003No ratings yet
- Foundations of Machine Learning: Module 6: Neural NetworkDocument19 pagesFoundations of Machine Learning: Module 6: Neural NetworkFaizaan KhanNo ratings yet
- Ann2018 L3 PDFDocument19 pagesAnn2018 L3 PDFAmartya KeshriNo ratings yet
- Neural Network and Fuzzy LogicDocument54 pagesNeural Network and Fuzzy Logicshreyas sr100% (1)
- Neural Network PresentationDocument33 pagesNeural Network PresentationMohd Yaseen100% (4)
- Neural Networks - An Introduction: Slide 1Document51 pagesNeural Networks - An Introduction: Slide 1ManlNo ratings yet
- Machine Learning: Artificial Neural Networks LEC-3BDocument29 pagesMachine Learning: Artificial Neural Networks LEC-3BTalha darNo ratings yet
- Neural Networks Solve XOR ProblemDocument15 pagesNeural Networks Solve XOR ProblemVeronica DumitrescuNo ratings yet
- DL CHPT 1Document59 pagesDL CHPT 1usernamehere3000No ratings yet
- Lecture3 - Linear ClassifiersDocument16 pagesLecture3 - Linear ClassifiersPacket MancerNo ratings yet
- AI Lecture on Neural Networks and PerceptronsDocument28 pagesAI Lecture on Neural Networks and PerceptronsHàssáñ YàsèéñNo ratings yet
- Linear Regression Class6Document15 pagesLinear Regression Class6Mohit SitlaniNo ratings yet
- Nonlinear SVM Classification Using KernelsDocument37 pagesNonlinear SVM Classification Using KernelsmalikdmaNo ratings yet
- Solution Manual Neural Networks and LearDocument5 pagesSolution Manual Neural Networks and LearSaket KumarNo ratings yet
- Solution Manual Neural Networks and LearDocument5 pagesSolution Manual Neural Networks and LearNadir KhanNo ratings yet
- Single Layer PercetronDocument20 pagesSingle Layer Percetronkumar ashirwad mishraNo ratings yet
- Chapter 07 Artificial Neural NetworkDocument62 pagesChapter 07 Artificial Neural NetworkRijesh ShresthaNo ratings yet
- CS423 Data Warehousing and Data Mining: Dr. Hammad AfzalDocument67 pagesCS423 Data Warehousing and Data Mining: Dr. Hammad AfzalZafar IqbalNo ratings yet
- Artificial Neural NetworksDocument31 pagesArtificial Neural NetworksSandra Martínez CastroNo ratings yet
- 2-Power Flow AnalysisDocument56 pages2-Power Flow AnalysisFady MichealNo ratings yet
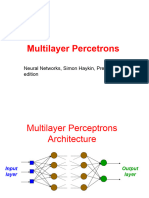
- Multi Layer Perceptron HaykinDocument50 pagesMulti Layer Perceptron HaykinAFFIFA JAHAN ANONNANo ratings yet
- Gradient Descent Learning: Minimize Objective Function: Error LandscapeDocument14 pagesGradient Descent Learning: Minimize Objective Function: Error LandscapePooja PatwariNo ratings yet
- Machine Learning NotesDocument5 pagesMachine Learning NotesYash GandharvNo ratings yet
- Hebb Neural Network: Learning and ApplicationsDocument12 pagesHebb Neural Network: Learning and ApplicationsVighnesh MNo ratings yet
- Module 2 Hebb NetDocument12 pagesModule 2 Hebb NetVighnesh MNo ratings yet
- ECE/CS 559 - Neural Networks Lecture Notes #4 The Perceptron and Its TrainingDocument12 pagesECE/CS 559 - Neural Networks Lecture Notes #4 The Perceptron and Its TrainingNihal Pratap GhanatheNo ratings yet
- Perceptron Convergance TheoremDocument13 pagesPerceptron Convergance TheoremAnurag RautNo ratings yet
- Viewing 2Document17 pagesViewing 2asdNo ratings yet
- Linear Classifiers: The ProblemDocument47 pagesLinear Classifiers: The ProblemVaishali DNo ratings yet
- Adaline and MedalineDocument14 pagesAdaline and MedalineBHAVNA AGARWAL50% (2)
- CSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamDocument43 pagesCSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamSadat Bin FaruqueNo ratings yet
- 3 DeltaRule PDFDocument10 pages3 DeltaRule PDFEs ENo ratings yet
- NN 2Document42 pagesNN 2Ku LotNo ratings yet
- Introduction To Neural Networks: John Paxton Montana State University Summer 2003Document31 pagesIntroduction To Neural Networks: John Paxton Montana State University Summer 2003Muhanad Al-khalisyNo ratings yet
- NEURAL NETWORK TITLEDocument103 pagesNEURAL NETWORK TITLEExpedito Mello0% (1)
- Brief Introduction to Neural Networks and Deep LearningDocument47 pagesBrief Introduction to Neural Networks and Deep LearningsaiNo ratings yet
- Xor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsDocument12 pagesXor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsRahul SinghNo ratings yet
- Linear ModelsDocument36 pagesLinear ModelsIstiaq AkbarNo ratings yet
- MathsDocument33 pagesMathsHoudaNo ratings yet
- 28 Lecture CSC462Document28 pages28 Lecture CSC462Sarmad RehanNo ratings yet
- Additional Exercises For ECE133A PDFDocument103 pagesAdditional Exercises For ECE133A PDFAzhari Al Ayyubi FaizNo ratings yet
- ECE133A Additional ExercisesDocument103 pagesECE133A Additional Exercisesmemex1100% (1)
- PT S2 Multivariable-ShortDocument22 pagesPT S2 Multivariable-ShortaditNo ratings yet
- Artificial Neural Networks: HCMC University of Technology Sep. 2008Document71 pagesArtificial Neural Networks: HCMC University of Technology Sep. 2008Dse YtNo ratings yet
- PreceptronDocument17 pagesPreceptroneng_kmmNo ratings yet
- Feed Forward NNDocument35 pagesFeed Forward NNMehak SmaghNo ratings yet
- PMR5406 Redes Neurais e Lógica Fuzzy: Aula 3 Single Layer PercetronDocument20 pagesPMR5406 Redes Neurais e Lógica Fuzzy: Aula 3 Single Layer PercetronYatin BajajNo ratings yet
- ECE 476 Lecture 14: Decoupled Power Flow AnalysisDocument38 pagesECE 476 Lecture 14: Decoupled Power Flow AnalysisFady MichealNo ratings yet
- Artificial Neural Network Learning RulesDocument60 pagesArtificial Neural Network Learning RulesAkhil AroraNo ratings yet
- 02 Neural NetworkDocument28 pages02 Neural NetworkAstri HaniefahNo ratings yet
- Neural Networks and Gradient DescentDocument17 pagesNeural Networks and Gradient DescentPRABHU PRASAD DEVNo ratings yet
- ML Lecture#4Document109 pagesML Lecture#4muhammadhzrizwan2002No ratings yet
- Artificial Neural NetworksDocument71 pagesArtificial Neural NetworksBharath KumarNo ratings yet
- Fundamentals of Artificial Neural Networks: Franco ScarselliDocument237 pagesFundamentals of Artificial Neural Networks: Franco Scarsellipaku deyNo ratings yet
- Intellual Property RightDocument25 pagesIntellual Property RightsinghalshilpiNo ratings yet
- Research MisconductDocument12 pagesResearch Misconductpaku deyNo ratings yet
- NTCC Minor Project ETMN600Document188 pagesNTCC Minor Project ETMN600paku deyNo ratings yet
- Unit 28 State and Globalisation: 28.0 ObjectivesDocument12 pagesUnit 28 State and Globalisation: 28.0 Objectivespaku deyNo ratings yet
- GATE 2019 SolutionDocument30 pagesGATE 2019 SolutionNasiruddin MondalNo ratings yet
- Assignment For BS701Document6 pagesAssignment For BS701paku deyNo ratings yet
- VHDL 4Document120 pagesVHDL 4paku deyNo ratings yet
- Traffic Light Controller Using VHDLDocument6 pagesTraffic Light Controller Using VHDLAbdoulrazakNo ratings yet
- JFS Presentation BS701Document5 pagesJFS Presentation BS701paku deyNo ratings yet
- 9.nuclear and Particle Physics - NET-JRF - June 2011-June 2017Document14 pages9.nuclear and Particle Physics - NET-JRF - June 2011-June 2017Ramesh IswaraNo ratings yet
- NIELIT Identity CardDocument1 pageNIELIT Identity Cardpaku deyNo ratings yet
- Email Enquiring About University Conference Date/TimingDocument3 pagesEmail Enquiring About University Conference Date/Timingpaku deyNo ratings yet
- BC701 Precise Writing AssignmentDocument2 pagesBC701 Precise Writing Assignmentpaku deyNo ratings yet
- Top 100 German VerbsDocument1 pageTop 100 German Verbsbekirm10% (1)
- Guidelines Working MinorsDocument7 pagesGuidelines Working Minorspaku deyNo ratings yet
- SAP PROJECT ON COVID-19 PREVENTIONDocument15 pagesSAP PROJECT ON COVID-19 PREVENTIONpaku deyNo ratings yet
- WK3 - Multi Layer PerceptronDocument59 pagesWK3 - Multi Layer Perceptronpaku deyNo ratings yet
- BC701 Essay Writing AssignmentDocument11 pagesBC701 Essay Writing Assignmentpaku deyNo ratings yet
- Neural NetworksDocument119 pagesNeural Networksmohanapriya100% (1)
- BC701 Precise Writing AssignmentDocument2 pagesBC701 Precise Writing Assignmentpaku deyNo ratings yet
- ECE 3561 Advanced Digital Design: Department of Electrical and Computer Engineering The Ohio State UniversityDocument20 pagesECE 3561 Advanced Digital Design: Department of Electrical and Computer Engineering The Ohio State Universitypaku deyNo ratings yet
- BC701 Mtech Class Test of Abhishek DeyDocument2 pagesBC701 Mtech Class Test of Abhishek Deypaku deyNo ratings yet
- Introduction to AVR ATMega32 ArchitectureDocument44 pagesIntroduction to AVR ATMega32 ArchitectureehsanNo ratings yet
- Wireless Sensor NetworksDocument211 pagesWireless Sensor Networkspaku deyNo ratings yet
- Types of Ethics TheoriesDocument10 pagesTypes of Ethics Theoriespaku deyNo ratings yet
- Coding & Information Theory ExplainedDocument38 pagesCoding & Information Theory Explainedpaku deyNo ratings yet
- Microwave Circuit Design and Simulation GuideDocument49 pagesMicrowave Circuit Design and Simulation GuideEng AbdiRahim Khalif AliNo ratings yet
- Artificial Neural Networks - : IntroductionDocument31 pagesArtificial Neural Networks - : Introductionpaku deyNo ratings yet
- Pediatrics Study ScheduleDocument2 pagesPediatrics Study ScheduleNatnaelNo ratings yet
- Using Previous Years AlmanacDocument1 pageUsing Previous Years AlmanacbhabhasunilNo ratings yet
- Direct Marketing: Mcgraw-Hill/IrwinDocument30 pagesDirect Marketing: Mcgraw-Hill/IrwinJunaid KhalidNo ratings yet
- Pag-IBIG Employer Enrollment FormDocument1 pagePag-IBIG Employer Enrollment FormDarlyn Etang100% (1)
- Families of Carbon Compounds: Functional Groups, Intermolecular Forces, & Infrared (IR) SpectrosDocument79 pagesFamilies of Carbon Compounds: Functional Groups, Intermolecular Forces, & Infrared (IR) SpectrosRuryKharismaMuzaqieNo ratings yet
- Vocabulary Practice 1Document3 pagesVocabulary Practice 1Phuong AnhNo ratings yet
- Berkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideDocument154 pagesBerkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideRita CamiloNo ratings yet
- Timetable 1Document1 pageTimetable 1sunilbijlaniNo ratings yet
- Jurnal Mira FixDocument16 pagesJurnal Mira Fixarisanto micoNo ratings yet
- GeM Bidding 3702669Document10 pagesGeM Bidding 3702669ANIMESH JAINNo ratings yet
- 2017 Expert Packet Workshop V3 + ExerciseDocument268 pages2017 Expert Packet Workshop V3 + ExerciseJeya ChandranNo ratings yet
- The Whole History of the Earth and LifeDocument2 pagesThe Whole History of the Earth and LifeEdward John Tensuan100% (1)
- 02.casebook - BLDG Repairs & Maint - Chapter 1 - 2011 (Water Seepage)Document13 pages02.casebook - BLDG Repairs & Maint - Chapter 1 - 2011 (Water Seepage)Hang kong TseNo ratings yet
- Omega: Mahdi Alinaghian, Nadia ShokouhiDocument15 pagesOmega: Mahdi Alinaghian, Nadia ShokouhiMohcine ES-SADQINo ratings yet
- Accounting Project Topics and Materials in NigeriaDocument97 pagesAccounting Project Topics and Materials in NigeriaProject Championz100% (2)
- Leaving Cert Maths ScholarshipsDocument3 pagesLeaving Cert Maths ScholarshipsJohn HayesNo ratings yet
- Haloalkanes and Haloarenes Notes GoodDocument21 pagesHaloalkanes and Haloarenes Notes GoodAnitesh DharamNo ratings yet
- The Neuroscience of Autism Spectrum DisordersDocument10 pagesThe Neuroscience of Autism Spectrum DisorderssouciNo ratings yet
- NYC Chocolate Chip Cookies! - Jane's PatisserieDocument2 pagesNYC Chocolate Chip Cookies! - Jane's PatisserieCharmaine IlaoNo ratings yet
- Trisomy 21 An Understanding of The DiseaseDocument28 pagesTrisomy 21 An Understanding of The DiseaseHannahjane YbanezNo ratings yet
- Manjit Thapp ResearchDocument24 pagesManjit Thapp ResearchDough RodasNo ratings yet
- But Virgil Was Not There": The Lasting Impact of Dante's Homosocial HellDocument7 pagesBut Virgil Was Not There": The Lasting Impact of Dante's Homosocial HellЮлия ЧебанNo ratings yet
- Standard JKR Spec For Bridge LoadingDocument5 pagesStandard JKR Spec For Bridge LoadingHong Rui ChongNo ratings yet
- ANNEX III-Site Components Drawings SetDocument96 pagesANNEX III-Site Components Drawings SetDenice Erika ManzanoNo ratings yet
- Actor analysis explores decision-making in environmental governanceDocument48 pagesActor analysis explores decision-making in environmental governancerizkyNo ratings yet
- 1675.does Concrete Lighten or Change Color As It DriesDocument5 pages1675.does Concrete Lighten or Change Color As It DriestvrNo ratings yet
- Consumer Notebook Price List For September 2010Document4 pagesConsumer Notebook Price List For September 2010Anand AryaNo ratings yet
- PDA Technical Documents on Sterilization ProcessesDocument3 pagesPDA Technical Documents on Sterilization ProcessesManas MishraNo ratings yet
- Fairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112Document24 pagesFairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112AYUSHNo ratings yet
- A History of Linear Electric MotorsDocument400 pagesA History of Linear Electric MotorseowlNo ratings yet