You might also like
- Econometric S Cheat SheetDocument3 pagesEconometric S Cheat SheetVaneNo ratings yet
- Fourier Series PDFDocument26 pagesFourier Series PDFRM FakharNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Combinatorial Techniques Sharad S. SaneDocument477 pagesCombinatorial Techniques Sharad S. SaneLeoNo ratings yet
- Worksheet 1 PDFDocument2 pagesWorksheet 1 PDFDimple BansalNo ratings yet
- Pattern Recognition & Learning II: © UW CSE Vision FacultyDocument47 pagesPattern Recognition & Learning II: © UW CSE Vision FacultyDuong TheNo ratings yet
- Murder at The Mayfair Diner - SolutionDocument6 pagesMurder at The Mayfair Diner - SolutionDhruv Baid100% (2)
- A Course in Abstract Analysis. John B. ConwayDocument385 pagesA Course in Abstract Analysis. John B. ConwayAxel Blanco OlivaresNo ratings yet
- Quartic Polynomial InvestigationDocument4 pagesQuartic Polynomial InvestigationNayerShammaaNo ratings yet
- Lab 5: 16 April 2012 Exercises On Neural NetworksDocument6 pagesLab 5: 16 April 2012 Exercises On Neural Networksಶ್ವೇತ ಸುರೇಶ್No ratings yet
- 3 DeltaRule PDFDocument10 pages3 DeltaRule PDFEs ENo ratings yet
- Supervised Learning Neural NetworksDocument34 pagesSupervised Learning Neural NetworksLekshmiNo ratings yet
- Artificial Neural NetworksDocument31 pagesArtificial Neural NetworksSandra Martínez CastroNo ratings yet
- LinearDocument18 pagesLinearshardapatelNo ratings yet
- Linear ModelsDocument30 pagesLinear ModelsshamyshabeerNo ratings yet
- Lecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksDocument70 pagesLecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksWantong LiaoNo ratings yet
- Single Layer Feedforward NetworksDocument21 pagesSingle Layer Feedforward NetworksAKSHIT MATHUR 15BEC0582No ratings yet
- Chap 2Document7 pagesChap 2劉柏賢No ratings yet
- 5 LR Apr 7 2021Document94 pages5 LR Apr 7 2021khchengNo ratings yet
- Unit 4 - Mathematics I - WWW - Rgpvnotes.inDocument11 pagesUnit 4 - Mathematics I - WWW - Rgpvnotes.insizuka689No ratings yet
- Regression Analysis: Ordinary Least SquaresDocument12 pagesRegression Analysis: Ordinary Least Squaresmpc.9315970No ratings yet
- Chapter 07 Artificial Neural NetworkDocument62 pagesChapter 07 Artificial Neural NetworkRijesh ShresthaNo ratings yet
- Notes On MSE Gradients For Neural Networks: 1 2 Mean Squared Error (MSE)Document10 pagesNotes On MSE Gradients For Neural Networks: 1 2 Mean Squared Error (MSE)benozamanNo ratings yet
- Conditional ExpectationDocument33 pagesConditional ExpectationOsama HassanNo ratings yet
- Neural Network and Fuzzy LogicDocument54 pagesNeural Network and Fuzzy Logicshreyas sr100% (1)
- Real Analysis QuestionDocument4 pagesReal Analysis QuestionTURKHUNTER 571No ratings yet
- Tutorial 8 QuestionsDocument3 pagesTutorial 8 QuestionsEvan DuhNo ratings yet
- Machine Learning NotesDocument5 pagesMachine Learning NotesYash GandharvNo ratings yet
- AlgcombDocument6 pagesAlgcombSanjeev Kumar DasNo ratings yet
- Advanced Numerical Analysis: Data Interpolation and SmoothingDocument26 pagesAdvanced Numerical Analysis: Data Interpolation and SmoothingBishnu LamichhaneNo ratings yet
- 2246chap2 PDFDocument20 pages2246chap2 PDFRoy VeseyNo ratings yet
- Correlation Learning Rule: M I I IDocument33 pagesCorrelation Learning Rule: M I I IStefanescu AlexandruNo ratings yet
- Orbital Free DFTDocument19 pagesOrbital Free DFTSaima NasirNo ratings yet
- Simple PerceptronsDocument28 pagesSimple PerceptronsRishabhNo ratings yet
- Homework1 2023Document3 pagesHomework1 2023HAO WUNo ratings yet
- CS423 Data Warehousing and Data Mining: Dr. Hammad AfzalDocument67 pagesCS423 Data Warehousing and Data Mining: Dr. Hammad AfzalZafar IqbalNo ratings yet
- Machine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Document49 pagesMachine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Lộc SẹoNo ratings yet
- Week 06 Lecture MaterialDocument46 pagesWeek 06 Lecture MaterialMeer HassanNo ratings yet
- MIT18 102s21 Lec1Document7 pagesMIT18 102s21 Lec1vladimirNo ratings yet
- MIT18 102s21 Full LecDocument125 pagesMIT18 102s21 Full LecProNo ratings yet
- LinearDocument31 pagesLinearHiGrill25No ratings yet
- Convex Sets and Jensen's InequalityDocument22 pagesConvex Sets and Jensen's InequalityNou ChannarithNo ratings yet
- Guass Legendre - Elyass ArramaDocument5 pagesGuass Legendre - Elyass ArramaElyass ArramaNo ratings yet
- Gradient Maths - Step by Step Delta Rule PDFDocument18 pagesGradient Maths - Step by Step Delta Rule PDFSava JovanovicNo ratings yet
- Integration by Parts: Harvey Mudd College Math TutorialDocument3 pagesIntegration by Parts: Harvey Mudd College Math TutorialameyaapteNo ratings yet
- Unit 5: Differentiation and Integration of Exponential and Logarithmic FunctionsDocument25 pagesUnit 5: Differentiation and Integration of Exponential and Logarithmic FunctionsDane SinclairNo ratings yet
- Cis515 11 sl4 PDFDocument42 pagesCis515 11 sl4 PDFSufyan SahooNo ratings yet
- Module 1 - BLD 519Document17 pagesModule 1 - BLD 519oludare oluwatosinNo ratings yet
- Artificial Neuron: Artificial Neural Network-IIIDocument14 pagesArtificial Neuron: Artificial Neural Network-IIIPIMRANo ratings yet
- Basics of Quantum Mechanics: Reading: QM Course Packet - CH 5Document17 pagesBasics of Quantum Mechanics: Reading: QM Course Packet - CH 5Harshdeep MauryaNo ratings yet
- Artificial Neural NetworksDocument61 pagesArtificial Neural NetworksNikhil Kumar sarwgiNo ratings yet
- 334 Quadfuncp 3Document8 pages334 Quadfuncp 3Louis GuyNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Shape Functions in 1DDocument29 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Shape Functions in 1DSanapala AmitNo ratings yet
- Vectorspace PDFDocument8 pagesVectorspace PDFTatenda BizureNo ratings yet
- Lab 04 Sol PDFDocument7 pagesLab 04 Sol PDFsumitNo ratings yet
- Homework2 v1.0Document5 pagesHomework2 v1.0royadaneshi2001No ratings yet
- Machine Learning - Logistic RegressionDocument16 pagesMachine Learning - Logistic RegressionnagybalyNo ratings yet
- 14.382 Inference: Creative Commons BY-NC-SADocument19 pages14.382 Inference: Creative Commons BY-NC-SADevendraReddyPoreddyNo ratings yet
- Gradient Descent Based LearnersDocument11 pagesGradient Descent Based LearnerssandtNo ratings yet
- Unit I Solution OF Equations AND Eigenvalue Problems: WWW - Vidyarthiplus.inDocument140 pagesUnit I Solution OF Equations AND Eigenvalue Problems: WWW - Vidyarthiplus.inRakshana TNo ratings yet
- Learning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007Document31 pagesLearning: Perceptrons & Neural Networks: Artificial Intelligence CMSC 25000 February 8, 2007paku deyNo ratings yet
- Linear Regression and Classification: Lectures 3-4Document41 pagesLinear Regression and Classification: Lectures 3-4ValNo ratings yet
- Problem Set #6 Solutions: General NotesDocument9 pagesProblem Set #6 Solutions: General Notesrandomrandom221No ratings yet
- Non-Spherical Errors: 1 Efficient OLSDocument14 pagesNon-Spherical Errors: 1 Efficient OLSPeterson SihotangNo ratings yet
- Element of Structures - HandoutsDocument7 pagesElement of Structures - HandoutsJosué SuárezNo ratings yet
- Signals and Systems by Prof. S.C. Dutta Roy SirDocument4 pagesSignals and Systems by Prof. S.C. Dutta Roy SirAnonymous JnvCyu85No ratings yet
- On Approximate Jacobian Matrices in Simulation of Multibody SystemsDocument2 pagesOn Approximate Jacobian Matrices in Simulation of Multibody Systemssvk_ntNo ratings yet
- Elements of Complex AnalysisDocument62 pagesElements of Complex AnalysisNaledi xuluNo ratings yet
- 1 Solutions in Cylindrical Coordinates: Bessel FunctionsDocument16 pages1 Solutions in Cylindrical Coordinates: Bessel FunctionsNicolas FernandezNo ratings yet
- Unit Plan Unit 5 Quadratic EquationsDocument4 pagesUnit Plan Unit 5 Quadratic Equationsapi-246282592No ratings yet
- Complex Analysis: PreliminariesDocument3 pagesComplex Analysis: PreliminariesLewis ProctorNo ratings yet
- Math 23 Lecture 4.6 Stokes TheoremDocument19 pagesMath 23 Lecture 4.6 Stokes TheoremRaphaelNo ratings yet
- Fourier Series Solved ProblemsDocument7 pagesFourier Series Solved ProblemsMeenaNo ratings yet
- Week03 Open MethodsDocument23 pagesWeek03 Open MethodsFatinnnnnnNo ratings yet
- Joseph Plazo - Reversible Eratosthenes VectorsDocument7 pagesJoseph Plazo - Reversible Eratosthenes VectorsJoseph Rinoza PlazoNo ratings yet
- Allcomic 1914Document80 pagesAllcomic 1914waeNo ratings yet
- Dynare RamseyDocument3 pagesDynare RamseyAdalberto CalsinNo ratings yet
- Aksum University College of Natural & Computational Sciences Department of Mathematics Assignment-1 of Partial Differential EquationsDocument11 pagesAksum University College of Natural & Computational Sciences Department of Mathematics Assignment-1 of Partial Differential Equationssahlewel weldemichaelNo ratings yet
- Solution of Differential Equation by Using Power Series Method PDFDocument5 pagesSolution of Differential Equation by Using Power Series Method PDFحسنين غانم خضيرNo ratings yet
- Polynomials 3Document11 pagesPolynomials 3Shashswat PatelNo ratings yet
- Rachel Quinlan-Advanced Linear Algebra (Lecture Notes) (2017)Document44 pagesRachel Quinlan-Advanced Linear Algebra (Lecture Notes) (2017)juannaviapNo ratings yet
- Arjun Raja - Math 8 DecDocument6 pagesArjun Raja - Math 8 DecblastergunmanNo ratings yet
- Minimum Spanning TreesDocument24 pagesMinimum Spanning TreesTestNo ratings yet
- Weyl's Equidistribution Theorem: Aditi KarDocument8 pagesWeyl's Equidistribution Theorem: Aditi KarOvidiu Bagdasar DimitriNo ratings yet
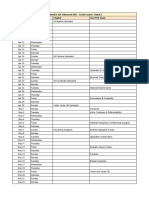
- Schedule Jee Advanced 2023 Batch 2Document2 pagesSchedule Jee Advanced 2023 Batch 2Filme RosterNo ratings yet
- Math Practice - Coordinate GeometryDocument4 pagesMath Practice - Coordinate GeometryAvi DhallNo ratings yet
- Chapter 5 IntegralDocument56 pagesChapter 5 IntegralFachryal HiltansyahNo ratings yet
- MathsBasic MSDocument9 pagesMathsBasic MSRenu YadavNo ratings yet
- Maths Class Xii Sample Paper Test 04 For Board Exam 2024 AnswersDocument15 pagesMaths Class Xii Sample Paper Test 04 For Board Exam 2024 AnswersMohanalakshmi ManoharNo ratings yet