You might also like
- Steepest Descent Is An Iterative Method For Solving Sparse Systems of Linear EquaDocument5 pagesSteepest Descent Is An Iterative Method For Solving Sparse Systems of Linear Equakushal bosuNo ratings yet
- Structural Analysis FEM Lecture 6 Method of Weighted ResidualsDocument10 pagesStructural Analysis FEM Lecture 6 Method of Weighted ResidualsPaul RichardsNo ratings yet
- BCH PDFDocument3 pagesBCH PDFIvan PerezNo ratings yet
- A B A+b+ (A, B) /2+..Document3 pagesA B A+b+ (A, B) /2+..deependra singh jadounNo ratings yet
- AM Prelim 201801Document4 pagesAM Prelim 201801Al-Tarazi AssaubayNo ratings yet
- Answer ChapterDocument3 pagesAnswer Chapterchic19801041No ratings yet
- TuringexampleDocument2 pagesTuringexamplenbd491No ratings yet
- Algebra1section5 3Document13 pagesAlgebra1section5 3api-358505269No ratings yet
- Math PDFDocument65 pagesMath PDFadfm680No ratings yet
- Week 2 BDocument24 pagesWeek 2 BMegane AlarieNo ratings yet
- Formula PDFDocument3 pagesFormula PDFWong Kai YiNo ratings yet
- Element of Structures - HandoutsDocument7 pagesElement of Structures - HandoutsJosué SuárezNo ratings yet
- FEM Report NgoVanDuoc 039Document15 pagesFEM Report NgoVanDuoc 039Ngô Văn ĐượcNo ratings yet
- Solid State Theory Exercise Sheet 1Document2 pagesSolid State Theory Exercise Sheet 1Deepak YadavNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Algebra1section3 3Document11 pagesAlgebra1section3 3api-358505269No ratings yet
- Finite Element Analysis of Structural SystemsDocument255 pagesFinite Element Analysis of Structural SystemsANANTHAN HASSANNo ratings yet
- Oscillatory IntegralsDocument8 pagesOscillatory IntegralsLiviu IgnatNo ratings yet
- Homework #7, Sec 12.2Document6 pagesHomework #7, Sec 12.2Masaya SatoNo ratings yet
- Random Variable Modified PDFDocument19 pagesRandom Variable Modified PDFIMdad HaqueNo ratings yet
- Week 2 NotesDocument23 pagesWeek 2 NotesHind OuazzaniNo ratings yet
- Exercise 2Document2 pagesExercise 2ParanoidNo ratings yet
- 1 - Expo-Log FNDocument54 pages1 - Expo-Log FNธนเสฐฐ์ กิตติวรรธโนทัยNo ratings yet
- Notes On Newton-Cotes QuadratureDocument5 pagesNotes On Newton-Cotes QuadratureMatija VasilevNo ratings yet
- A Finite Element Crash Course: 1 Continuous Piecewise LinearsDocument10 pagesA Finite Element Crash Course: 1 Continuous Piecewise LinearsRohini ManchaiahNo ratings yet
- Most Important Theoratical Questions of QTDocument26 pagesMost Important Theoratical Questions of QTIsmith PokhrelNo ratings yet
- Probability: Problem Set 4 - SolutionsDocument4 pagesProbability: Problem Set 4 - SolutionsMary RomeroNo ratings yet
- HW1 SolutionDocument7 pagesHW1 SolutionLê QuânNo ratings yet
- Lecture 11Document6 pagesLecture 11anket21-307No ratings yet
- Training ExercisesDocument2 pagesTraining Exercisesmax musterNo ratings yet
- 2 1D Finite Elements For Axially Loaded Rods: σ = Eε = E du dxDocument34 pages2 1D Finite Elements For Axially Loaded Rods: σ = Eε = E du dxEleonora InghelleriNo ratings yet
- Formula Sheet STAT1301Document3 pagesFormula Sheet STAT1301janeNo ratings yet
- Short History of Transcendental FunctionDocument30 pagesShort History of Transcendental FunctionMannuelle GacudNo ratings yet
- 2 Frobenius Series Solution of Ordinary Differential EquationsDocument7 pages2 Frobenius Series Solution of Ordinary Differential EquationsSubhadip PalNo ratings yet
- A Brief Description of The HHO AlgorithmDocument5 pagesA Brief Description of The HHO AlgorithmArthur RedNo ratings yet
- Spectral - Graph - Theory - 5Document32 pagesSpectral - Graph - Theory - 5Thảo NgọcNo ratings yet
- Optimization Techniques 1. Least SquaresDocument17 pagesOptimization Techniques 1. Least SquaresKhalil UllahNo ratings yet
- 1.6. Families of DistributionsDocument9 pages1.6. Families of DistributionsNogs MujeebNo ratings yet
- The Exponential FunctionDocument18 pagesThe Exponential FunctionLucas BonifacioNo ratings yet
- Engineering Mathematics: Lecture - 3Document23 pagesEngineering Mathematics: Lecture - 3Md. Tanzim Hossain 1620776642No ratings yet
- Bab 5 - Vector SpacesDocument25 pagesBab 5 - Vector SpacesMonalisa Lestari SinabutarNo ratings yet
- Algebra Linear e CombinatóriaDocument11 pagesAlgebra Linear e CombinatóriaMatheus DomingosNo ratings yet
- Random Variable Unit I NotesDocument8 pagesRandom Variable Unit I Notessneha srinivasanNo ratings yet
- Euler Method ReviewDocument20 pagesEuler Method ReviewUntitled SongNo ratings yet
- Particle in A Box (Text 5.8) : Boundary ConditionsDocument7 pagesParticle in A Box (Text 5.8) : Boundary ConditionsRakib AhsanNo ratings yet
- Sio223a Chap7 PDFDocument13 pagesSio223a Chap7 PDFRevanth VennuNo ratings yet
- M3 2020-Module1Document15 pagesM3 2020-Module1raovinayakm2No ratings yet
- Surge and Logistic Functions InvestigationDocument19 pagesSurge and Logistic Functions InvestigationYaxuan Zhu50% (2)
- MT1186 Chapter 1 FunctionsDocument36 pagesMT1186 Chapter 1 FunctionsPeterParker1983No ratings yet
- Engineering Mathematics NotesDocument5 pagesEngineering Mathematics NotesSyed Beeban BashaNo ratings yet
- Exercise Sheet-2Document3 pagesExercise Sheet-2pauline chauveauNo ratings yet
- Transformations of Graphs TutorialDocument9 pagesTransformations of Graphs Tutoriallbwnb.68868No ratings yet
- 1 Solving First Order Linear Differential EquationsDocument4 pages1 Solving First Order Linear Differential EquationsmrtfkhangNo ratings yet
- 2018 See MousDocument1 page2018 See MousHipstersdssadadNo ratings yet
- Vi PDFDocument23 pagesVi PDFroy 123No ratings yet
- Algebra1section6 2Document11 pagesAlgebra1section6 2api-358505269No ratings yet
- IB Paper 2 2022 Differential EquationssDocument7 pagesIB Paper 2 2022 Differential EquationssYannNo ratings yet
- 2007 IMO Training Camp: Contributors: Potla, E.lopes, Pohoatza, MattilgaleDocument3 pages2007 IMO Training Camp: Contributors: Potla, E.lopes, Pohoatza, MattilgaleHariPrasad PoilathNo ratings yet
- Gauss-Markov EconometricsDocument2 pagesGauss-Markov EconometricsMarlon Quiñonez BallardoNo ratings yet
- Qts313&403-Five 2122Document4 pagesQts313&403-Five 2122oludare oluwatosinNo ratings yet
- Module 2 - BLD 519Document16 pagesModule 2 - BLD 519oludare oluwatosinNo ratings yet
- BLD 503 - Management of Building ProjectDocument8 pagesBLD 503 - Management of Building Projectoludare oluwatosinNo ratings yet
- I LEADDocument5 pagesI LEADoludare oluwatosinNo ratings yet
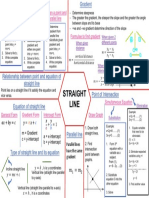
- Mind Map Straight LineDocument1 pageMind Map Straight LineMiyamura YsrNo ratings yet
- F4 AM P2 PAT 2022 New2Document19 pagesF4 AM P2 PAT 2022 New2YUSFALINA BINTI MOHD YUSOFF MoeNo ratings yet
- AljabarDocument10 pagesAljabarSely Purwanti nNo ratings yet
- Expected Number System Questions For Railway NTPC Stage II ExamsDocument20 pagesExpected Number System Questions For Railway NTPC Stage II ExamsLakshmi RjNo ratings yet
- TASC Test Practice Items MathDocument13 pagesTASC Test Practice Items MathrogermoarNo ratings yet
- Demo ApplicationDocument4 pagesDemo ApplicationKishi Nissi Dela CruzNo ratings yet
- Zero and Negative Exponents: Quarter 2Document16 pagesZero and Negative Exponents: Quarter 2Carmi Formentera LuchavezNo ratings yet
- Unit 3 - Week 2: Assignment 2Document2 pagesUnit 3 - Week 2: Assignment 2V I J A Y E D I T ZNo ratings yet
- B/A A' N (A) A And, Then Will: (1,2, A, B) (A, B) (1,2) And, Then Will: (1,3) (1) (1,2,3)Document3 pagesB/A A' N (A) A And, Then Will: (1,2, A, B) (A, B) (1,2) And, Then Will: (1,3) (1) (1,2,3)Wajid JamilNo ratings yet
- Circular PermutationDocument7 pagesCircular Permutationsoon siewleeNo ratings yet
- Jan 2018 4h - UnlockedDocument24 pagesJan 2018 4h - UnlockedahmedNo ratings yet
- Lec3 Gradient Based Method Part IDocument30 pagesLec3 Gradient Based Method Part IAbhay JindalNo ratings yet
- Wilson's TheoremDocument2 pagesWilson's TheoremSumeet Gupta67% (3)
- Algebra in MATLABDocument8 pagesAlgebra in MATLABAsim HussainNo ratings yet
- Matrices by PN ChatterjeeDocument453 pagesMatrices by PN ChatterjeeNadim Reza Prantick89% (9)
- Paharang Integrated School: Department of EducationDocument3 pagesPaharang Integrated School: Department of EducationMarina AcuñaNo ratings yet
- Math 8 Module First QuarterDocument46 pagesMath 8 Module First QuarterVanesaVirtudazo100% (1)
- 2 Week 1 Module 2 Math Practice Problems SolutionsDocument27 pages2 Week 1 Module 2 Math Practice Problems SolutionsDarren Ian MaalihanNo ratings yet
- Lim 9x 1: Answer All Questions in This SectionDocument4 pagesLim 9x 1: Answer All Questions in This SectionXue Yi LamNo ratings yet
- Coordinate Geometry RevisedDocument12 pagesCoordinate Geometry RevisedPratul PrakharNo ratings yet
- Basic Calculus - Q4 - Week3 Edited VersionDocument18 pagesBasic Calculus - Q4 - Week3 Edited VersionAdaill JosephNo ratings yet
- Lecture Notes On Dynamical Systems, Chaos and Fractal GeometryDocument272 pagesLecture Notes On Dynamical Systems, Chaos and Fractal GeometryAC_AderemiNo ratings yet
- QuestionDocument4 pagesQuestionpujaNo ratings yet
- BSI Complex Variables Cloplos, Fall 2020Document5 pagesBSI Complex Variables Cloplos, Fall 2020Ahmar KhanNo ratings yet
- Homework For Module 3 Part 2Document6 pagesHomework For Module 3 Part 2bita younesian100% (3)
- Linear AlgebraDocument150 pagesLinear AlgebrameastroccsmNo ratings yet
- Imo Problem Solution 1959 2009Document342 pagesImo Problem Solution 1959 2009Kun ZhouNo ratings yet
- FHMM1014 Chapter 2 PolynomialDocument75 pagesFHMM1014 Chapter 2 PolynomialHarbender Gill100% (1)
- John B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsDocument13 pagesJohn B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsPlamcfeNo ratings yet
- Class: X Mathematics Chapter: Trigonometry Questions: Questions Based On "High Order Thinking Skills" HOTSDocument7 pagesClass: X Mathematics Chapter: Trigonometry Questions: Questions Based On "High Order Thinking Skills" HOTSvtaunk1No ratings yet