You might also like
- ME2142-2 Lab MAnual Speed and Position ControlDocument9 pagesME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanNo ratings yet
- Qualitative PI ControlDocument4 pagesQualitative PI ControlAbeer ChaudhryNo ratings yet
- Dynex Hisense Service Manual DX L40 10ADocument50 pagesDynex Hisense Service Manual DX L40 10Acmh88888100% (1)
- Procedimiento de Calibracion de Los TT1000A PDFDocument9 pagesProcedimiento de Calibracion de Los TT1000A PDFjose gutierrezNo ratings yet
- A032z122 - I2 - 201010 Operation Maual With PCC1.1Document29 pagesA032z122 - I2 - 201010 Operation Maual With PCC1.1thainarime100% (1)
- Diagramas Esquematicos TV LED LGDocument49 pagesDiagramas Esquematicos TV LED LGLuis Alonso Rosero Velez100% (1)
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 pagesClosed-Loop Control of DC Drives With Controlled RectifierakbarsohailshaikhNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 pagesClosed-Loop Control of DC Drives With Controlled RectifierNithiya MaharajanNo ratings yet
- Closed Loop Control NewDocument47 pagesClosed Loop Control NewDr.K.Krishna Veni ProfessorNo ratings yet
- Lecture 9 Controlled Rectifier DC Drives-Closed Loop PDFDocument44 pagesLecture 9 Controlled Rectifier DC Drives-Closed Loop PDFmayajogiNo ratings yet
- Closed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BDocument36 pagesClosed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BOsama TobasyNo ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- S-17 2030 Lab 2Document18 pagesS-17 2030 Lab 2शर्मिला बस्नेतNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument40 pagesClosed-Loop Control of DC Drives With Controlled Rectifierathan19490% (1)
- Power Supply Control - DC - DC ConverterDocument32 pagesPower Supply Control - DC - DC Converterdivya k sNo ratings yet
- Chapter 4-Closed Loop DC Motor ControlDocument58 pagesChapter 4-Closed Loop DC Motor ControlBoughiout Islam abd elsammedNo ratings yet
- Modelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeDocument9 pagesModelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeJames XgunNo ratings yet
- 1 Introduction To Electrical Drive SystemsDocument30 pages1 Introduction To Electrical Drive Systemsngobi25eddyNo ratings yet
- Direct Torque Control of Induction MotorDocument37 pagesDirect Torque Control of Induction Motorpuria_rishabhNo ratings yet
- Adisu DC DCDocument20 pagesAdisu DC DCAdisuNo ratings yet
- G.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesDocument35 pagesG.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesAbhinav G. KhandekarNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- DC Motor Drives 2007Document48 pagesDC Motor Drives 2007stubborn002No ratings yet
- Induction MachineDocument20 pagesInduction MachineUsama RaoNo ratings yet
- Servo MotorDocument16 pagesServo MotorMinh Tuan Tran100% (1)
- The Converter (Power Circuit) - 2. The D-STATCOM ControllerDocument42 pagesThe Converter (Power Circuit) - 2. The D-STATCOM ControllersiddhardhaNo ratings yet
- Introduction Switched Capacitor CircuitsDocument18 pagesIntroduction Switched Capacitor CircuitsFarheenNo ratings yet
- A High Performance Field-Oriented Control For A Switched Reluctance Motor DriveDocument6 pagesA High Performance Field-Oriented Control For A Switched Reluctance Motor Driveapi-26587237No ratings yet
- DavidDocument25 pagesDavidgtchsekharNo ratings yet
- Control BLDC MotorsDocument5 pagesControl BLDC MotorsVasu SureshNo ratings yet
- REPS 12 PaperDocument7 pagesREPS 12 PaperbharathesecNo ratings yet
- NAWEA2015 NOVOA Final MODIFIEDDocument22 pagesNAWEA2015 NOVOA Final MODIFIEDjijo123408No ratings yet
- DCM SessoinDocument63 pagesDCM SessoinLakshmiNo ratings yet
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Design of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CDocument25 pagesDesign of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CShuaib Ahmad KhanNo ratings yet
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocument41 pages5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNo ratings yet
- Electric Drive - Mid Semsester Examination - 05 - October 2020Document3 pagesElectric Drive - Mid Semsester Examination - 05 - October 2020Tushar SanwareyNo ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
- DC MotorsDocument58 pagesDC MotorsSuhanNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Industrial Electronics CbcgsDocument28 pagesIndustrial Electronics Cbcgshadesg895No ratings yet
- Power Engineering Eng 3-4Document2 pagesPower Engineering Eng 3-4icaanmpzNo ratings yet
- Power Electronics - Chapter 8Document37 pagesPower Electronics - Chapter 8Mohamed ElgeziryNo ratings yet
- Motor Controls: Anibal T. de AlmeidaDocument42 pagesMotor Controls: Anibal T. de Almeidaabdallah hosinNo ratings yet
- Vector ControlDocument5 pagesVector Controlapi-26587237No ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Chapter 5. Protection RelayDocument56 pagesChapter 5. Protection RelayBio Debataraja100% (1)
- Ijett V53P221Document6 pagesIjett V53P221Rifky WahyudaNo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Section 2 Intro To DC Motor DrivesDocument52 pagesSection 2 Intro To DC Motor DrivesMak YabuNo ratings yet
- Closed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueDocument4 pagesClosed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueLoyel RoseNo ratings yet
- EET414 Chapter 5Document46 pagesEET414 Chapter 5Lee Boon HongNo ratings yet
- Ce 2 PDFDocument72 pagesCe 2 PDFDivya RajanNo ratings yet
- Transmission Line Power Transfer Capability Improvement, Case StudyDocument5 pagesTransmission Line Power Transfer Capability Improvement, Case StudyMuhammad NawalNo ratings yet
- AC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesDocument31 pagesAC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesAnonymous FKMfvCbNo ratings yet
- DC Drives 2022 Copy UpdatedDocument49 pagesDC Drives 2022 Copy UpdatedAzmi Shah Alias KhooNo ratings yet
- CLUSTER V Stability AnalysisDocument120 pagesCLUSTER V Stability AnalysisVinayaniv YanivNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- 445 AndradaDocument5 pages445 AndradaSung Ryoung LimNo ratings yet
- Analysis of Electro-Hydraulic Proportional Speed CDocument9 pagesAnalysis of Electro-Hydraulic Proportional Speed CEduardo RibeiroNo ratings yet
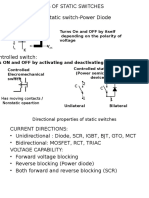
- Types of Static SwitchesDocument55 pagesTypes of Static SwitchesSubhash MurkuteNo ratings yet
- Electric Motor Drive PDFDocument20 pagesElectric Motor Drive PDFMoaz ShafiNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Problems Bank 2Document7 pagesProblems Bank 2rida.hamza.muhammadNo ratings yet
- Lec # 021 Thermal Time ConstantDocument16 pagesLec # 021 Thermal Time ConstantAyeshaNo ratings yet
- 2 5314548925267449197Document21 pages2 5314548925267449197rida.hamza.muhammadNo ratings yet
- EMS For Small Scale Hybrid Wind Solar Battery Based MicrogridDocument10 pagesEMS For Small Scale Hybrid Wind Solar Battery Based MicrogridkartikNo ratings yet
- Determination of Effectiveness of Energy Management System in BuiDocument198 pagesDetermination of Effectiveness of Energy Management System in Buirida.hamza.muhammadNo ratings yet
- Frequency MeterDocument5 pagesFrequency MeterNh Chuminda YapaNo ratings yet
- 26MF605W - LCD TV MonitorDocument108 pages26MF605W - LCD TV MonitorJesus SilvaNo ratings yet
- ELC4536 Standar 6 Años GarantiaDocument3 pagesELC4536 Standar 6 Años GarantiaDilham BerrioNo ratings yet
- TEPZZ - 9 - 6 - 6B - T: European Patent SpecificationDocument15 pagesTEPZZ - 9 - 6 - 6B - T: European Patent Specificationzweisteine777No ratings yet
- Samsung UE48JS8500 EU Modell Schnellstartanleitung 5fd81fDocument36 pagesSamsung UE48JS8500 EU Modell Schnellstartanleitung 5fd81flovrata4550No ratings yet
- Annunciator KeyboardDocument11 pagesAnnunciator KeyboardMiguel Angel Gómez PérezNo ratings yet
- MOS T1,.T3 SUPERIM. 110..250vac/dc New: General InformationDocument2 pagesMOS T1,.T3 SUPERIM. 110..250vac/dc New: General InformationJhonny Velasquez PerezNo ratings yet
- Manual User EcgDocument40 pagesManual User EcgJoy MarvelNo ratings yet
- Rode nt5 Product - Manual PDFDocument8 pagesRode nt5 Product - Manual PDFsirvientedediosNo ratings yet
- 3m qtII 5623kDocument4 pages3m qtII 5623kcerachuckNo ratings yet
- DS9637A Dual Differential Line Receiver: Features DescriptionDocument7 pagesDS9637A Dual Differential Line Receiver: Features DescriptionBrahim RebaouiNo ratings yet
- Service Manual Dptv305 Dptv310 Dptv315 Dptv330 Dptv335 Dptv340 Dptv345 51mp392h-17 Chassis Mag01 7Document1,848 pagesService Manual Dptv305 Dptv310 Dptv315 Dptv330 Dptv335 Dptv340 Dptv345 51mp392h-17 Chassis Mag01 7brianatwoodNo ratings yet
- HS-PX590 HS-PX997: Service ManualDocument12 pagesHS-PX590 HS-PX997: Service ManualSebastian Winged Neko KippNo ratings yet
- Electrom iTIG II Moottorimittauslaitteet - ENGDocument6 pagesElectrom iTIG II Moottorimittauslaitteet - ENGE BuNo ratings yet
- Ac17 AisDocument2 pagesAc17 AisParul MehtaNo ratings yet
- Lift MLC 8000Document202 pagesLift MLC 8000Phạm MạnhNo ratings yet
- EMI-Signal GeneratorsDocument7 pagesEMI-Signal GeneratorsVineela ThonduriNo ratings yet
- en HR RoDocument86 pagesen HR RoGabriel SetnicNo ratings yet
- Quick Start Guide: 1. Unpack The Switch and Check Contents 2. Attach The BracketsDocument9 pagesQuick Start Guide: 1. Unpack The Switch and Check Contents 2. Attach The BracketsJohn JacobNo ratings yet
- Electrical Resistance of Semi-ConductorDocument11 pagesElectrical Resistance of Semi-ConductorZeyad EssamNo ratings yet
- KSD301 Snap Action ThermostatDocument6 pagesKSD301 Snap Action ThermostatAntonio Carlos Del CastilloNo ratings yet
- CS6461 - Computer Architecture Fall 2016 Instructor Morris LancasterDocument28 pagesCS6461 - Computer Architecture Fall 2016 Instructor Morris Lancaster闫麟阁No ratings yet
- Li Fi TechnologyDocument34 pagesLi Fi TechnologyAmit Kumar MauryaNo ratings yet
- 3 Measurement of Power and Power Factor in 3 Phase CircuitDocument6 pages3 Measurement of Power and Power Factor in 3 Phase Circuitsatishsongs1No ratings yet
- Anatomy of A Power MOSFET PresentationDocument57 pagesAnatomy of A Power MOSFET PresentationMax WhittenNo ratings yet