You might also like
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- SolidWorks BrochureDocument2 pagesSolidWorks BrochureNatarajan RamamoorthyNo ratings yet
- Me6703 Cim - QBDocument22 pagesMe6703 Cim - QBMukesh SaravananNo ratings yet
- Unit I CAD CAMDocument19 pagesUnit I CAD CAMpraveenNo ratings yet
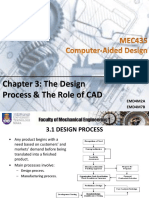
- The Design Process & The Role of CADDocument12 pagesThe Design Process & The Role of CADSyafiqah Shahuri100% (1)
- Assignment Topics With Materials UNIT-I Fundamentals of CAD/CAMDocument112 pagesAssignment Topics With Materials UNIT-I Fundamentals of CAD/CAMRaj KumarNo ratings yet
- Computer Integrated Manufacturing: A Seminar OnDocument66 pagesComputer Integrated Manufacturing: A Seminar OnZoya RizviNo ratings yet
- Cim Short Question and AnswerDocument9 pagesCim Short Question and AnswerMartin De Boras Pragash100% (1)
- Additive Manufacturing and Future of Automated FactoryDocument30 pagesAdditive Manufacturing and Future of Automated FactoryBhramith KNo ratings yet
- 2018 Applications Industry4Document123 pages2018 Applications Industry4Ridwan MerduNo ratings yet
- Basic Manufacturing Process Assignment (Me204) : Cad, Cam and CimDocument20 pagesBasic Manufacturing Process Assignment (Me204) : Cad, Cam and CimRaghunath VeeramaniNo ratings yet
- Optitex Implementation GuideDocument14 pagesOptitex Implementation GuidecookushkaNo ratings yet
- Design and Development of PCB Milling MachineDocument6 pagesDesign and Development of PCB Milling Machinesjcit.bracNo ratings yet
- Group 6Document128 pagesGroup 6Trisha mae latayanNo ratings yet
- Ime 4Document21 pagesIme 4pavan06mceNo ratings yet
- CHAPTER 1 (A) : ObjectivesDocument9 pagesCHAPTER 1 (A) : ObjectivesMuhammadRamdanMohdSulaimanNo ratings yet
- Welding Robot Using ArduinoDocument13 pagesWelding Robot Using ArduinoBeer BhadraNo ratings yet
- Group TechnologyDocument26 pagesGroup TechnologyMohitNo ratings yet
- Research Reprot 1Document7 pagesResearch Reprot 1Siyeon YeungNo ratings yet
- Me6005 QB 2marksDocument19 pagesMe6005 QB 2marksharishankarnadarNo ratings yet
- Program - DELMIA - Operations Engineering - ArticulateDocument19 pagesProgram - DELMIA - Operations Engineering - ArticulateCaleb Quiros SeguraNo ratings yet
- Robot Simulation With RobcadDocument42 pagesRobot Simulation With RobcadMaverick SatNo ratings yet
- Siemens PLM Fibersim BR X44Document20 pagesSiemens PLM Fibersim BR X44Big FloresNo ratings yet
- InternshipDocument33 pagesInternshipsravankumarNo ratings yet
- Maintainability), Followed by Sewing Machine Makers, and Then Textile, Farm MachineryDocument27 pagesMaintainability), Followed by Sewing Machine Makers, and Then Textile, Farm MachineryAkshay AsNo ratings yet
- Acadm Overview Bro UsDocument4 pagesAcadm Overview Bro User_chanayNo ratings yet
- Chapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BDocument59 pagesChapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BfaqhrulNo ratings yet
- CAD/CAM Means Computer-Aided Design and Computer-Aided Manufacturing. It Is The TechnologyDocument10 pagesCAD/CAM Means Computer-Aided Design and Computer-Aided Manufacturing. It Is The TechnologyRavi SekharNo ratings yet
- CHAPTER 3 (A)Document27 pagesCHAPTER 3 (A)daneshnedaieNo ratings yet
- ME 473 Unit 6ADocument19 pagesME 473 Unit 6AAma Serwaa YeboahNo ratings yet
- Lecture 6 (B) - Automation of Production SystemsDocument31 pagesLecture 6 (B) - Automation of Production Systemsdub911No ratings yet
- Cad Lab Manual 2018-19Document61 pagesCad Lab Manual 2018-19M NANDITHA CIVIL STAFFNo ratings yet
- D MurtyDocument3 pagesD Murtydineshtej7768No ratings yet
- Computer Integrated ManufacturingDocument61 pagesComputer Integrated ManufacturingjaisonNo ratings yet
- Project Report On Reverse Engineering: Guide: Prof Biswanath DoloiDocument31 pagesProject Report On Reverse Engineering: Guide: Prof Biswanath DoloiBIPLAB MONDALNo ratings yet
- Autocad Mechanical 2013 Faq enDocument3 pagesAutocad Mechanical 2013 Faq enGanesh palaniNo ratings yet
- COGNEX In-Sight Product GuideDocument16 pagesCOGNEX In-Sight Product GuidedollareNo ratings yet
- CC 5291 M.E Cad Anna UniversityDocument95 pagesCC 5291 M.E Cad Anna UniversityJsvijay KumarNo ratings yet
- NUMECA CorporateDocument19 pagesNUMECA CorporateAji PurwantoNo ratings yet
- Pdtmia3 Assessment Type QuestionsDocument20 pagesPdtmia3 Assessment Type QuestionsSiyabonga MthombeniNo ratings yet
- 12.1 Digital Fabrication and Rapid PrototypingDocument49 pages12.1 Digital Fabrication and Rapid Prototypinggamingprakash700No ratings yet
- 2012 Inventor Overview BrochureDocument16 pages2012 Inventor Overview BrochurejtpmlNo ratings yet
- PLM Chapter 4Document16 pagesPLM Chapter 4Orville Sutari0% (1)
- Introduction To Cad/CamDocument68 pagesIntroduction To Cad/CamSuresh GoudNo ratings yet
- Introduction To CAMDocument42 pagesIntroduction To CAMapoorva.choudhary02No ratings yet
- A Presentation On: Unit VI: CAD Customization & Automation By, ByDocument41 pagesA Presentation On: Unit VI: CAD Customization & Automation By, Byvishwajeet patilNo ratings yet
- Process Selection and Facility LayoutDocument43 pagesProcess Selection and Facility LayoutLEIGHANNE ZYRIL SANTOSNo ratings yet
- Experimental Investigation On Minimizing Cycle Time and Cost of Radial Drill Head Feed Box Housing in Vertical Machining Centre VMC Using Optimized Canned Cycles IJERTV5IS080451Document6 pagesExperimental Investigation On Minimizing Cycle Time and Cost of Radial Drill Head Feed Box Housing in Vertical Machining Centre VMC Using Optimized Canned Cycles IJERTV5IS08045121P113 - MOHAMMED FAHAD ANo ratings yet
- ME6005 Ppce QBDocument18 pagesME6005 Ppce QBKamalakkannan Krishnan100% (1)
- Concurrent Engineering, Collaborative EngineeringDocument20 pagesConcurrent Engineering, Collaborative EngineeringRushabh KhivasaraNo ratings yet
- Manufacturing Engineering Processes For Off-Road Buggy'S Fuel Tank ProductionDocument12 pagesManufacturing Engineering Processes For Off-Road Buggy'S Fuel Tank ProductionTJPRC PublicationsNo ratings yet
- Kalaignar Karunanidhi Institute of Technology Coimbatore - 641 402 Department of Mechanical EngineeringDocument95 pagesKalaignar Karunanidhi Institute of Technology Coimbatore - 641 402 Department of Mechanical EngineeringThiru MoorthyNo ratings yet
- Cad-Cam Manual PDFDocument34 pagesCad-Cam Manual PDFM.Saravana Kumar..M.E100% (2)
- Dodad AssemblyDocument71 pagesDodad AssemblyRonak PatelNo ratings yet
- Vision Systems ArchtectureDocument16 pagesVision Systems ArchtectureJohn ChansaNo ratings yet
- LCI Report Config - EnglDocument19 pagesLCI Report Config - EnglMihai Cristian LascuNo ratings yet
- Engineering Applications: A Project Resource BookFrom EverandEngineering Applications: A Project Resource BookRating: 2.5 out of 5 stars2.5/5 (1)
- Make It! The Engineering Manufacturing Solution: Engineering the Manufacturing SolutionFrom EverandMake It! The Engineering Manufacturing Solution: Engineering the Manufacturing SolutionNo ratings yet
- Exploring Autodesk Revit 2018 for MEP, 5th EditionFrom EverandExploring Autodesk Revit 2018 for MEP, 5th EditionRating: 1 out of 5 stars1/5 (1)