You might also like
- ES Lecture - Sept 21 Priority InversionDocument28 pagesES Lecture - Sept 21 Priority InversionAbhishek KumarNo ratings yet
- Real-Time Scheduling: Deadline Based AlgorithmsDocument22 pagesReal-Time Scheduling: Deadline Based AlgorithmsRita ChhikaraNo ratings yet
- Module 3 - Real Time Task Scheduling - Part1Document53 pagesModule 3 - Real Time Task Scheduling - Part1pranavNo ratings yet
- Priority-Driven Scheduling of Periodic TasksDocument21 pagesPriority-Driven Scheduling of Periodic TasksChichavn ManucianNo ratings yet
- End-To-End Task in Heterogeneous SystemsDocument13 pagesEnd-To-End Task in Heterogeneous SystemsMayank SolankiNo ratings yet
- Inter-Process Communication and SynchronizationDocument43 pagesInter-Process Communication and SynchronizationRama ShankarNo ratings yet
- EEM202A/CSM213A - Fall 2011: Mani Srivastava Mbs@ucla - Edu Networked & Embedded Systems Lab UclaDocument87 pagesEEM202A/CSM213A - Fall 2011: Mani Srivastava Mbs@ucla - Edu Networked & Embedded Systems Lab Uclaneetika guptaNo ratings yet
- TaskDocument14 pagesTaskGUTTA JIGNESH CHOWDARY 18BCE1085No ratings yet
- Resource Sharing Non PreemptedDocument33 pagesResource Sharing Non PreemptedShubham DNo ratings yet
- EE5900 Advanced Embedded System For Smart Infrastructure: RMS and EDF SchedulingDocument35 pagesEE5900 Advanced Embedded System For Smart Infrastructure: RMS and EDF Schedulingkarvind08No ratings yet
- Module 4 - 1Document47 pagesModule 4 - 1Darshan BabuNo ratings yet
- Module 4 - 3Document62 pagesModule 4 - 3Darshan BabuNo ratings yet
- Unit - 4 & 5Document86 pagesUnit - 4 & 5Chaturya DoddiNo ratings yet
- Chapter 5 AhmedDocument33 pagesChapter 5 AhmedAHMED DARAJNo ratings yet
- LQ 6-1Document15 pagesLQ 6-1abdullahNo ratings yet
- Real Time Systems: Assignment - 2 Name: Vithya M BITS ID: 2019HT01605 Session ID: Session1584817886264 (AndDocument8 pagesReal Time Systems: Assignment - 2 Name: Vithya M BITS ID: 2019HT01605 Session ID: Session1584817886264 (AndvithyaNo ratings yet
- SchedulingDocument9 pagesSchedulingsolocreator3No ratings yet
- Unit - 4 ErtosDocument69 pagesUnit - 4 ErtosAbhi VarmaNo ratings yet
- 10 - Concurrency ControlDocument18 pages10 - Concurrency ControlgauravNo ratings yet
- Multitasking and Resource Sharing in Embedded SystemsDocument31 pagesMultitasking and Resource Sharing in Embedded SystemsKhaled RelaTivNo ratings yet
- Multiprocessor Real-Time SchedulingDocument38 pagesMultiprocessor Real-Time SchedulingUm NoorNo ratings yet
- Effects of Resource Contention and Resource Access Control: Priority InversionDocument10 pagesEffects of Resource Contention and Resource Access Control: Priority InversionShubham KushwahaNo ratings yet
- Chapte4 ZamznDocument24 pagesChapte4 ZamznAHMED DARAJNo ratings yet
- Is It Time Yet?: Wing On ChanDocument58 pagesIs It Time Yet?: Wing On ChanShashank SinghNo ratings yet
- Operating System: Inter Process CommunicationDocument38 pagesOperating System: Inter Process CommunicationMubaraka KundawalaNo ratings yet
- OSEK ProgrammingDocument105 pagesOSEK ProgrammingaustinvishalNo ratings yet
- 06 RealtimeDocument48 pages06 RealtimeBlair ZhangNo ratings yet
- 08 ThreadsDocument13 pages08 Threadsapi-3811447No ratings yet
- Rts Unit IIIDocument31 pagesRts Unit IIIGanapati ThotaNo ratings yet
- RTSys Lecture Note - Ch04 Clock-Driven SchedulingDocument24 pagesRTSys Lecture Note - Ch04 Clock-Driven Schedulingسام السبئيNo ratings yet
- Interprocess CommunicationDocument30 pagesInterprocess CommunicationSanjay ShahNo ratings yet
- 08.705 RTOS Module 2 NotesDocument30 pages08.705 RTOS Module 2 NotesAssini HussainNo ratings yet
- Scheduling Sporadic JobsDocument14 pagesScheduling Sporadic JobsSmriti RanaNo ratings yet
- Operating System: By: Vandana KateDocument22 pagesOperating System: By: Vandana KatePriyanshu PareekNo ratings yet
- Embedded Systems UNIT-4 Introduction To RTOS: DR - Rekha.K.S. Associate Professor, Dept of CS&E NIE, MysuruDocument33 pagesEmbedded Systems UNIT-4 Introduction To RTOS: DR - Rekha.K.S. Associate Professor, Dept of CS&E NIE, MysuruAyanokojiNo ratings yet
- ConcurrencyDocument76 pagesConcurrencyNoel GirmaNo ratings yet
- Overview of RTOSDocument22 pagesOverview of RTOSveeramaniks408No ratings yet
- CSL373: Lecture 6 CPU SchedulingDocument20 pagesCSL373: Lecture 6 CPU SchedulingFaruk KhanNo ratings yet
- Definitions of Resources Resource Access Control For Static SystemsDocument30 pagesDefinitions of Resources Resource Access Control For Static SystemsAtul DwivevdiNo ratings yet
- Programmable Logic Controllers: PLC Timer FunctionsDocument9 pagesProgrammable Logic Controllers: PLC Timer Functionsanuradha19No ratings yet
- NewshareddataproblemDocument26 pagesNewshareddataproblemNandhini PNo ratings yet
- Assignment 1Document10 pagesAssignment 1Anitha JersonNo ratings yet
- Bits RTOS AssignmentDocument4 pagesBits RTOS AssignmentGaurang PrajapatiNo ratings yet
- Embedded Systems Overview: - RTOS/EOS Design ConceptDocument19 pagesEmbedded Systems Overview: - RTOS/EOS Design ConceptbravotolitsNo ratings yet
- ADB Chapter3Document39 pagesADB Chapter3Tamiru SemenehNo ratings yet
- OS AssignmentDocument11 pagesOS AssignmentAshikul Hasan ShakilNo ratings yet
- RTXC Real Time Executive in CDocument63 pagesRTXC Real Time Executive in Cvansi84No ratings yet
- DSAL-210-Lecture 2 - Understanding Algorithm ComplexityDocument14 pagesDSAL-210-Lecture 2 - Understanding Algorithm ComplexityKutemwa MithiNo ratings yet
- Santosh V Hegde-2022HT01035-ESZG553 RTSDocument7 pagesSantosh V Hegde-2022HT01035-ESZG553 RTSsantosh vighneshwar hegdeNo ratings yet
- RTOS NewDocument67 pagesRTOS NewmNo ratings yet
- IPC - STDocument95 pagesIPC - STTu TuNo ratings yet
- Banker's Algorithm: Assignment 3 - Fall 2009 V202: Operating Systems Nathan HullDocument4 pagesBanker's Algorithm: Assignment 3 - Fall 2009 V202: Operating Systems Nathan Hullsantosh_11_09No ratings yet
- 08 SchedulingDocument64 pages08 SchedulingAkhil KalraNo ratings yet
- 120511/industrial Engineering: Unit-4 Project ManagementDocument56 pages120511/industrial Engineering: Unit-4 Project ManagementAman RajpootNo ratings yet
- Fungsi Timmert Pada PLC GanDocument9 pagesFungsi Timmert Pada PLC GanAgung EchelonNo ratings yet
- Topic 4 NotesDocument4 pagesTopic 4 Notesxatogiv661No ratings yet
- Assignment 1Document2 pagesAssignment 1Abdul WahabNo ratings yet
- For FinalExamDocument65 pagesFor FinalExamwondi BETNo ratings yet
- RtosDocument33 pagesRtosIrshan NazirNo ratings yet
- Semaphore IPCDocument33 pagesSemaphore IPCNandhini PNo ratings yet
- NewshareddataproblemDocument26 pagesNewshareddataproblemNandhini PNo ratings yet
- Multipleand CountingsemaphoreresourcekeyDocument25 pagesMultipleand CountingsemaphoreresourcekeyNandhini PNo ratings yet
- Unit II - ModelsDocument49 pagesUnit II - ModelsNandhini PNo ratings yet
- Micro and Macro DiversityDocument46 pagesMicro and Macro DiversityNandhini PNo ratings yet
- Types of Small Scale FadingDocument7 pagesTypes of Small Scale FadingNandhini PNo ratings yet
- Chapter 7Document6 pagesChapter 7Nandhini PNo ratings yet
- Channel CapacityDocument4 pagesChannel CapacityNandhini PNo ratings yet
- KHKJHKDocument8 pagesKHKJHKMD. Naimul Isalm ShovonNo ratings yet
- IB CHALLENGE - DifferentiationDocument8 pagesIB CHALLENGE - DifferentiationmakunjapNo ratings yet
- DR: A.P.J Abdul Kalam'S Biography: By, Githu RajuDocument11 pagesDR: A.P.J Abdul Kalam'S Biography: By, Githu RajuGithu RajuNo ratings yet
- Windows PreInstallation Environment (WiNPE) WhitepaperDocument15 pagesWindows PreInstallation Environment (WiNPE) WhitepaperstrfericiriNo ratings yet
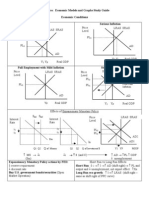
- AP Macroeconomic Models and Graphs Study GuideDocument23 pagesAP Macroeconomic Models and Graphs Study GuideAznAlexT90% (21)
- Antentop 2009-01Document103 pagesAntentop 2009-01Black OnionNo ratings yet
- Noes Flex CubeDocument8 pagesNoes Flex CubeSeboeng MashilangoakoNo ratings yet
- Manual Topworx D Esd Partial Stroke Emergency Shut Down Iom Topworx en 4852782Document28 pagesManual Topworx D Esd Partial Stroke Emergency Shut Down Iom Topworx en 4852782Juan LuisNo ratings yet
- 9702 PHYSICS: MARK SCHEME For The May/June 2012 Question Paper For The Guidance of TeachersDocument7 pages9702 PHYSICS: MARK SCHEME For The May/June 2012 Question Paper For The Guidance of TeachersxiaokiaNo ratings yet
- EMDT49 Echoes From Fomalhaut #03 Blood, Death, and TourismDocument48 pagesEMDT49 Echoes From Fomalhaut #03 Blood, Death, and Tourismfreepdf11062023No ratings yet
- Proview Datasheet - SM MDVR 401 4G - INDDocument2 pagesProview Datasheet - SM MDVR 401 4G - INDSlamat AgungNo ratings yet
- Escala TimpDocument8 pagesEscala TimpLucy GonzalesNo ratings yet
- The List, Stack, and Queue Adts Abstract Data Type (Adt)Document17 pagesThe List, Stack, and Queue Adts Abstract Data Type (Adt)Jennelyn SusonNo ratings yet
- Grep v1p5Document111 pagesGrep v1p5joseNo ratings yet
- 28.3.2022 - Practice Test - SsDocument3 pages28.3.2022 - Practice Test - SsTran Hanh DanNo ratings yet
- SC Eh760Document44 pagesSC Eh760Rafael troyano cardenasNo ratings yet
- 2023 C Class Sedan AMG Order Guide en - UsDocument17 pages2023 C Class Sedan AMG Order Guide en - UsHiro Hieu NguyenNo ratings yet
- Infrared CO2 Sensor Module (Model: MH-Z19B) : User's ManualDocument9 pagesInfrared CO2 Sensor Module (Model: MH-Z19B) : User's ManualAvs ElectronNo ratings yet
- Nao Presentation - Robotics Lab, KCTDocument16 pagesNao Presentation - Robotics Lab, KCTRamkumar ANo ratings yet
- Urine AnalysisDocument17 pagesUrine AnalysisHarshya RajeevanNo ratings yet
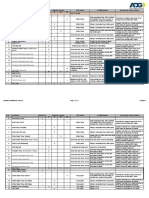
- Construction Issue: Qty. (Nos) AI DI AO DO Hvac System I Water Chilling Units 3Document11 pagesConstruction Issue: Qty. (Nos) AI DI AO DO Hvac System I Water Chilling Units 3Al Amin Hossain Srabon100% (1)
- Composition of PetroleumDocument17 pagesComposition of PetroleumAleem Ahmed100% (1)
- Dunnaway Reviewer 1Document38 pagesDunnaway Reviewer 1march8200871% (7)
- Credentials Evaluation Service Applicant HandbookDocument26 pagesCredentials Evaluation Service Applicant HandbookdramachicNo ratings yet
- Insitu GelDocument96 pagesInsitu Gelvinsijuvin555No ratings yet
- MARUTI Vision and MissionDocument10 pagesMARUTI Vision and MissionAarif Raheem Rather80% (5)
- Ductile Iron Pipe vs. HDPE Pipe: Strength and ForDocument15 pagesDuctile Iron Pipe vs. HDPE Pipe: Strength and ForZahid JiwaNo ratings yet
- Morpheus SoftDocument14 pagesMorpheus SoftTj NishaaNo ratings yet
- Annotation in Indicator 2Document1 pageAnnotation in Indicator 2jon pantzNo ratings yet
- Em - U2 - LINCOLN Valve Change OverDocument3 pagesEm - U2 - LINCOLN Valve Change OverRobertoNo ratings yet