You might also like
- Smart Dust: Communicating With A Cubic-Millimeter ComputerDocument36 pagesSmart Dust: Communicating With A Cubic-Millimeter ComputerKaustav BhattacharyaNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- XP MOBILETT Elara Max VF10 DatasheetDocument18 pagesXP MOBILETT Elara Max VF10 Datasheetfikri adiansyahNo ratings yet
- CMOS Tech Loose ModDocument17 pagesCMOS Tech Loose ModAjay YadavNo ratings yet
- Smart DustDocument29 pagesSmart DustgluciferNo ratings yet
- Sensors For Space ApplicationsDocument6 pagesSensors For Space Applicationsamiriut97No ratings yet
- Muhammad Azam: Prepared byDocument27 pagesMuhammad Azam: Prepared byAmaad AhmedNo ratings yet
- Smart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Document21 pagesSmart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Anonymous WplpBJlF2kNo ratings yet
- Smart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Document18 pagesSmart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Shyam NairNo ratings yet
- Smart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Document21 pagesSmart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Ashok SutharNo ratings yet
- Sensor NetworksDocument54 pagesSensor NetworksYOUNG_NO_MORENo ratings yet
- Marwar Engineering College and Research CentreDocument58 pagesMarwar Engineering College and Research CentreGaurav JainNo ratings yet
- Medium Range (MR) OTDR Module: MTS/T-BERD PlatformsDocument6 pagesMedium Range (MR) OTDR Module: MTS/T-BERD PlatformsAlison ThomasNo ratings yet
- Cmos MemsDocument28 pagesCmos MemsJaved HussainNo ratings yet
- Report For Industrial Monitoring-1Document73 pagesReport For Industrial Monitoring-1Abin K MathewNo ratings yet
- Lecture3.1Factors Influencing Sensor NetworkDocument75 pagesLecture3.1Factors Influencing Sensor NetworkAamir HabibNo ratings yet
- Catalogo Estacion Total North Modelo NXR 2 SegundosDocument2 pagesCatalogo Estacion Total North Modelo NXR 2 SegundosIlich VillavicencioNo ratings yet
- North NXR Series Total Station 2014 enDocument2 pagesNorth NXR Series Total Station 2014 encesar cubillosNo ratings yet
- WSN - Chapter 1 Introduction2013Document109 pagesWSN - Chapter 1 Introduction2013Debasis DakuaNo ratings yet
- Smart: Vinay Kumar Reddy ADocument27 pagesSmart: Vinay Kumar Reddy AVIn'y R'diNo ratings yet
- PorosimeterDocument4 pagesPorosimeterrael*No ratings yet
- Smart Sensor Nodes For Airborne Particulate Concentration DetectionDocument10 pagesSmart Sensor Nodes For Airborne Particulate Concentration DetectionSergio MitmaNo ratings yet
- Smart Dust & Its Applications: by Pankaj SharmaDocument60 pagesSmart Dust & Its Applications: by Pankaj SharmaZatin GuptaNo ratings yet
- Solar Operated Metal Detector Robot Based On GSMDocument4 pagesSolar Operated Metal Detector Robot Based On GSMIJIRSTNo ratings yet
- Optoelectronic Sensing System For Tactile SkinDocument23 pagesOptoelectronic Sensing System For Tactile Skinvipul4792No ratings yet
- Brochure - DigiAtlantis DHEM PDFDocument2 pagesBrochure - DigiAtlantis DHEM PDFAnagha SubashNo ratings yet
- Layout Peralatan LaboratoriumDocument22 pagesLayout Peralatan LaboratoriumAldi RahmayadiNo ratings yet
- Cat OptoNCDT enDocument36 pagesCat OptoNCDT enNikhil SharmaNo ratings yet
- Otu 8000 Optical Test Unit Data Sheets enDocument2 pagesOtu 8000 Optical Test Unit Data Sheets enSalahuddin MughalNo ratings yet
- 2021-06-18 Maier Et Al - Single Microcontroller Air Coupled Waveguided Ultrasonic Sonar SubmittedversionDocument4 pages2021-06-18 Maier Et Al - Single Microcontroller Air Coupled Waveguided Ultrasonic Sonar SubmittedversionAHMADNo ratings yet
- OTU-8000 Optical Test Unit: Rack-Mounted Fiber Test For Backbone, Metro, and Access NetworksDocument2 pagesOTU-8000 Optical Test Unit: Rack-Mounted Fiber Test For Backbone, Metro, and Access Networksvijay_786No ratings yet
- WSN Chapter 3Document75 pagesWSN Chapter 3sanyukta246No ratings yet
- Sensys Ch2 Single NodeDocument51 pagesSensys Ch2 Single NodeAkash KhajuriaNo ratings yet
- Devicenet: T SensorsDocument18 pagesDevicenet: T SensorsEswar Kiran ReddyNo ratings yet
- Ultra Sonic Distance Meter Using Microcontroller by Pawan KadamDocument19 pagesUltra Sonic Distance Meter Using Microcontroller by Pawan KadamPawan Kardam100% (2)
- Ime-To-Igital - Onverter: 28 January 2014 Document-No: AN034 - en - PDF V1.3Document28 pagesIme-To-Igital - Onverter: 28 January 2014 Document-No: AN034 - en - PDF V1.3AbdullahNo ratings yet
- Sensor Networks: Directed Diffusion and Other ProposalsDocument80 pagesSensor Networks: Directed Diffusion and Other ProposalsphanthitheNo ratings yet
- HM-3300/3600 Dust Sensor Data Sheet: Version Number V2.1 Prepared by Audit Release Date July 20, 2018Document17 pagesHM-3300/3600 Dust Sensor Data Sheet: Version Number V2.1 Prepared by Audit Release Date July 20, 2018bomman69No ratings yet
- Smart DustDocument31 pagesSmart DustUmamaheshwar ChNo ratings yet
- Bomb Detection Robotics Using Embedded Controller: Gurdas, KaranDocument4 pagesBomb Detection Robotics Using Embedded Controller: Gurdas, KaranPayel PalNo ratings yet
- A Capacitive Hybrid Flip-Chip ASIC and Sensor For Fingerprint, Navigation and Pointer DetectionDocument21 pagesA Capacitive Hybrid Flip-Chip ASIC and Sensor For Fingerprint, Navigation and Pointer DetectionAbhishek JainNo ratings yet
- Be Ece 7th Semester Syllabus For Regulation 2008Document11 pagesBe Ece 7th Semester Syllabus For Regulation 2008tannamalaiNo ratings yet
- A New Batteryless Active RFID System: Smart RFID: Tolga KAYA, PH.DDocument4 pagesA New Batteryless Active RFID System: Smart RFID: Tolga KAYA, PH.DRamalingNo ratings yet
- Foct 2 Advanced Fiber Optics TrainerDocument1 pageFoct 2 Advanced Fiber Optics TrainerAmish TankariyaNo ratings yet
- Smart Dust: by A.XavierinaDocument11 pagesSmart Dust: by A.XavierinaXAVIERINANo ratings yet
- Virtual EyeDocument7 pagesVirtual EyeraviNo ratings yet
- Meteor 1500CDocument2 pagesMeteor 1500Cketab_doost100% (1)
- For Data Compression and Prediction: Learning in Wireless Sensor NetworksDocument60 pagesFor Data Compression and Prediction: Learning in Wireless Sensor NetworksAugusto BaffaNo ratings yet
- PMD 2005 USA BrochureDocument6 pagesPMD 2005 USA BrochureErica BeasleyNo ratings yet
- Presentation On Smart DustDocument12 pagesPresentation On Smart Dustmrsharad1No ratings yet
- Circuit Integration For RF and Microwave ApplicationsDocument110 pagesCircuit Integration For RF and Microwave ApplicationsRudra Tej MNo ratings yet
- Beyond DAS: Advances in Distributed Rayleigh Sensing DR Gareth LeesDocument32 pagesBeyond DAS: Advances in Distributed Rayleigh Sensing DR Gareth Leesshaggy00780% (1)
- Dam Monitoring PPT 1Document19 pagesDam Monitoring PPT 1Technos_IncNo ratings yet
- NDI Manual 2013 - v10Document13 pagesNDI Manual 2013 - v10Yudha Bhakti NugrahaNo ratings yet
- Isscc2020 05 DigestDocument32 pagesIsscc2020 05 DigestpaggyNo ratings yet
- ASC DriveBay BrochureDocument2 pagesASC DriveBay Brochureaudy2010No ratings yet
- The Greatest Threat To National Security Is "Terrorism", Infiltrating Through BordersDocument12 pagesThe Greatest Threat To National Security Is "Terrorism", Infiltrating Through BordersJagadeesh ANo ratings yet
- Prepared By: Naveen KumarDocument28 pagesPrepared By: Naveen KumarmintoissacNo ratings yet
- Microwave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsFrom EverandMicrowave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
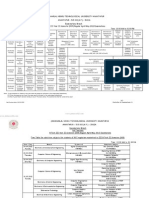
- B.tech 3-2 Regular & Supple (April - May 2012) Exams Time TablesDocument11 pagesB.tech 3-2 Regular & Supple (April - May 2012) Exams Time TablesKona ReddappaNo ratings yet
- Activity Diagrams For Rose ArchitectDocument10 pagesActivity Diagrams For Rose ArchitectKona ReddappaNo ratings yet
- Atm 1Document32 pagesAtm 1Vishal FalakeNo ratings yet
- R09 CSE Lab 3 4Document18 pagesR09 CSE Lab 3 4Sri HarshaNo ratings yet