0% found this document useful (0 votes)
13 views33 pages11 Errors
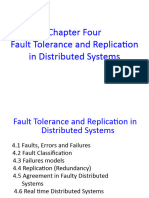
The lecture discusses types of errors in distributed systems, distinguishing between hard and soft errors, with examples such as DRAM errors. It covers the importance of measuring availability using metrics like MTTF, MTTR, and the implications of different availability percentages on downtime. Additionally, it explores error detection and recovery techniques, including redundancy, error correcting codes, and the significance of understanding failure correlations in system design.
Uploaded by
Shawkat KhanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
13 views33 pages11 Errors
The lecture discusses types of errors in distributed systems, distinguishing between hard and soft errors, with examples such as DRAM errors. It covers the importance of measuring availability using metrics like MTTF, MTTR, and the implications of different availability percentages on downtime. Additionally, it explores error detection and recovery techniques, including redundancy, error correcting codes, and the significance of understanding failure correlations in system design.
Uploaded by
Shawkat KhanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd