You might also like
- Dynamic Signal Analysis BasicsDocument18 pagesDynamic Signal Analysis BasicsDina ArzinaNo ratings yet
- 3D Modeling WikiBookDocument283 pages3D Modeling WikiBookMikeVV100% (2)
- Stylized Characters EbookDocument35 pagesStylized Characters EbookRafael Macedo100% (1)
- Digital Image Processing Segmntation Lab With PythonDocument9 pagesDigital Image Processing Segmntation Lab With PythonVishal VermaNo ratings yet
- Texturing Pipeline - Texturing A Graffitied Dumpster in Substance Painter.Document20 pagesTexturing Pipeline - Texturing A Graffitied Dumpster in Substance Painter.Jasmine MastersNo ratings yet
- DSP Question Bank IV CSE - Cs - 2403docDocument36 pagesDSP Question Bank IV CSE - Cs - 2403docSiva NandanNo ratings yet
- Digital Image ProcessingDocument27 pagesDigital Image Processingainugiri91% (11)
- Five Principles For Research EthicsDocument7 pagesFive Principles For Research EthicsLokesh GagnaniNo ratings yet
- Project ReportDocument40 pagesProject ReportAnirudh NoriNo ratings yet
- n-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityDocument7 pagesn-1 n-1 -j2πnk/N n=0: Explain the Properties of 2D discrete Fourier Transform 1. SeparabilityArun EceNo ratings yet
- Week No 11 SpatialFilteringDocument34 pagesWeek No 11 SpatialFilteringRubinaNo ratings yet
- Spatial Filters in Image ProcessingDocument68 pagesSpatial Filters in Image ProcessingMudassir RafiqNo ratings yet
- Thiebaut 2008 MarseilleDocument12 pagesThiebaut 2008 MarseilleAnonymous FGY7goNo ratings yet
- Digital Image Processing: Lecture 9 and 10Document35 pagesDigital Image Processing: Lecture 9 and 10nnehasinghNo ratings yet
- Performance Analysis of Daubechies Wavelet in Image Deblurring and DenoisingDocument5 pagesPerformance Analysis of Daubechies Wavelet in Image Deblurring and DenoisingIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Principal of Image Processing - Image Enhancement EbookDocument26 pagesPrincipal of Image Processing - Image Enhancement EbookHimanshu BhardwajNo ratings yet
- L17 - Mask Processing - 1Document37 pagesL17 - Mask Processing - 1ramadeviNo ratings yet
- Support 2021 P1Document11 pagesSupport 2021 P1Remi LNo ratings yet
- Image Transforms and Image Enhancement in Frequency Domain: EE4830 Lecture 5 Feb 19, 2007 Lexing XieDocument51 pagesImage Transforms and Image Enhancement in Frequency Domain: EE4830 Lecture 5 Feb 19, 2007 Lexing XieAdarsh AnchiNo ratings yet
- Digital Video: Progressive Scanning: One Full Frame Every 1/30th of A SecondDocument12 pagesDigital Video: Progressive Scanning: One Full Frame Every 1/30th of A Secondsandipprmar007No ratings yet
- Spatial FilteringDocument52 pagesSpatial FilteringAnonymous 0L2mVaINo ratings yet
- Option Com - Content&view Section&id 3&itemid 41: Article IndexDocument53 pagesOption Com - Content&view Section&id 3&itemid 41: Article IndexnaninanyeshNo ratings yet
- 10 Image Segmentation April 2019Document20 pages10 Image Segmentation April 2019Eng DlovanNo ratings yet
- Adaptive Filtering: 7.2.1 Telephone Echo CancellerDocument10 pagesAdaptive Filtering: 7.2.1 Telephone Echo CancellerTsega TeklewoldNo ratings yet
- Image Enhancement in The Spatial DomainDocument8 pagesImage Enhancement in The Spatial DomainDevendra Pratap 2K21/PHDEC/26No ratings yet
- Digital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image ProcessingDocument33 pagesDigital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image Processingsrinivas CVNo ratings yet
- Adaptive Filtering For Medical Image Based On 3-Order Tensor FieldDocument4 pagesAdaptive Filtering For Medical Image Based On 3-Order Tensor FieldmiusayNo ratings yet
- Wavelet Based Image Segmentation: Andrea Gavlasov A, Ale S Proch Azka, and Martina Mudrov ADocument7 pagesWavelet Based Image Segmentation: Andrea Gavlasov A, Ale S Proch Azka, and Martina Mudrov AajuNo ratings yet
- FiltrostransformationDocument6 pagesFiltrostransformationDiana PrietoNo ratings yet
- Updated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Document84 pagesUpdated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Yousef AboamaraNo ratings yet
- Fundamentals of Spatial Filtering: Outline of The LectureDocument6 pagesFundamentals of Spatial Filtering: Outline of The LectureSyedaNo ratings yet
- FilterDocument23 pagesFilterTekalign TadesseNo ratings yet
- New Approach To Edge Detection On Different Level of Wavelet Decomposition Vladimir Maksimovi C, Branimir Jak Si C, Mile Petrovi C Petar Spalevi C, Stefan Pani CDocument24 pagesNew Approach To Edge Detection On Different Level of Wavelet Decomposition Vladimir Maksimovi C, Branimir Jak Si C, Mile Petrovi C Petar Spalevi C, Stefan Pani CСтефан ПанићNo ratings yet
- MIC Filters FinalDocument2 pagesMIC Filters FinalmyertenNo ratings yet
- Unit 2Document51 pagesUnit 22021pcecscharul037No ratings yet
- Noise Reduction and Object Enhancement in Passive Millimeter Wave Concealed Weapon DetectionDocument4 pagesNoise Reduction and Object Enhancement in Passive Millimeter Wave Concealed Weapon DetectionhukumaramNo ratings yet
- Design of Digital FiltersDocument26 pagesDesign of Digital FiltersLatha VenkateshNo ratings yet
- Dip Spatial FilteringDocument32 pagesDip Spatial FilteringMadhuri PotluriNo ratings yet
- Cone Beam Reconstruction: Jiang Hsieh, PH.DDocument48 pagesCone Beam Reconstruction: Jiang Hsieh, PH.Dit's somvanshiNo ratings yet
- Reduction of Speckle Noise in SAR Images With Hybrid Wavelet FilterDocument8 pagesReduction of Speckle Noise in SAR Images With Hybrid Wavelet FilterIJRASETPublicationsNo ratings yet
- 9 Linear Filters: (X (t), t ∈ Z) (β, j ∈ Z) (Y (t), t ∈ Z) − j), t ∈ Z,Document9 pages9 Linear Filters: (X (t), t ∈ Z) (β, j ∈ Z) (Y (t), t ∈ Z) − j), t ∈ Z,souvik5000No ratings yet
- An1621 Digital Image ProcessingDocument18 pagesAn1621 Digital Image ProcessingSekhar ChallaNo ratings yet
- Lec 16 Image MaskingDocument35 pagesLec 16 Image MaskingIqrakhanNo ratings yet
- Digital Image Processing: Lecture 8 and 9Document34 pagesDigital Image Processing: Lecture 8 and 9nnehasinghNo ratings yet
- Chapter 19Document102 pagesChapter 19RichurajanNo ratings yet
- LAB 7: IIR Filter Design ObjectivesDocument13 pagesLAB 7: IIR Filter Design Objectivesmjrahimi.eee2020No ratings yet
- An Innovative Polariscope For Photoelastic Stress Analysis PDFDocument6 pagesAn Innovative Polariscope For Photoelastic Stress Analysis PDFHuzaifa NakhwaNo ratings yet
- The DC Blocking Filter - J de Freitas Jan 2007Document7 pagesThe DC Blocking Filter - J de Freitas Jan 2007Hiếu Trung HoàngNo ratings yet
- Digital Image ProcessingDocument24 pagesDigital Image Processingkainsu12100% (1)
- Pre-Stack F-K Median Filtering David.G. Schieck and Robert.R. StewartDocument21 pagesPre-Stack F-K Median Filtering David.G. Schieck and Robert.R. StewartddprosNo ratings yet
- Multiscale Transforms: Wavelets, Ridgelets, Curvelets, EtcDocument34 pagesMultiscale Transforms: Wavelets, Ridgelets, Curvelets, EtcarjunNo ratings yet
- Week 5Document31 pagesWeek 5Shehabeldeen Hesham Mahmoud AbdelmoatyNo ratings yet
- Communication: Elimination of AC Interference in Electmcardiogram UsingDocument5 pagesCommunication: Elimination of AC Interference in Electmcardiogram UsingmuraliNo ratings yet
- C4 - DH-Image Filtering-VietDocument28 pagesC4 - DH-Image Filtering-VietPhuong PuniNo ratings yet
- Fourier TransformDocument60 pagesFourier TransformmanjushaNo ratings yet
- Lec-2 Image Enhancement in The Frequency DomainDocument74 pagesLec-2 Image Enhancement in The Frequency DomainravibabukancharlaNo ratings yet
- 9 - Martin, de Masson Et Varray - ArticleDocument64 pages9 - Martin, de Masson Et Varray - ArticleVishwanath ShervegarNo ratings yet
- Assignment 4Document4 pagesAssignment 4Teo CreNo ratings yet
- Narayana Engineering College: 1.define Image?Document9 pagesNarayana Engineering College: 1.define Image?DurgadeviNo ratings yet
- Image Restoration Using Wavelet Based Image FusionDocument7 pagesImage Restoration Using Wavelet Based Image FusionanniNo ratings yet
- Feature Based Watermarking Algorithm For Image Authentication Using D4 Wavelet TransformDocument12 pagesFeature Based Watermarking Algorithm For Image Authentication Using D4 Wavelet TransformsipijNo ratings yet
- Feedforward FiltersDocument9 pagesFeedforward FiltersforrestyanNo ratings yet
- 03.DIP. FilteringDocument36 pages03.DIP. FilteringMeii QuỳnhNo ratings yet
- Image Enhancement IIDocument78 pagesImage Enhancement IIHIMANI NARAIN HIMANI NARAINNo ratings yet
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerFrom EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNo ratings yet
- Unit 8: Weak Slot-and-Filler StructuresDocument23 pagesUnit 8: Weak Slot-and-Filler StructuresLokesh GagnaniNo ratings yet
- Unit 9: Strong Slot-and-Filler StructuresDocument18 pagesUnit 9: Strong Slot-and-Filler StructuresLokesh GagnaniNo ratings yet
- Unit 11Document12 pagesUnit 11Lokesh GagnaniNo ratings yet
- Artificial Intelligence (Predicate Logic)Document29 pagesArtificial Intelligence (Predicate Logic)Lokesh GagnaniNo ratings yet
- Cuckoo Search With Levy FlightDocument4 pagesCuckoo Search With Levy FlightLokesh GagnaniNo ratings yet
- OOPJ - Unit 5Document28 pagesOOPJ - Unit 5Lokesh GagnaniNo ratings yet
- Practical - 2: WCP To Implement NWCMDocument5 pagesPractical - 2: WCP To Implement NWCMLokesh GagnaniNo ratings yet
- Section 4 in The Right To Information Act, 2005Document2 pagesSection 4 in The Right To Information Act, 2005Lokesh GagnaniNo ratings yet
- Unit 15: Interaction ModelingDocument56 pagesUnit 15: Interaction ModelingLokesh GagnaniNo ratings yet
- SOC - Unit 4 (GTU)Document26 pagesSOC - Unit 4 (GTU)Lokesh GagnaniNo ratings yet
- Unit 7: Multithreading ProgrammingDocument40 pagesUnit 7: Multithreading ProgrammingLokesh GagnaniNo ratings yet
- (N D Vohra Unsolved Q-4 Page-594) (Solution: 6 Years)Document15 pages(N D Vohra Unsolved Q-4 Page-594) (Solution: 6 Years)Lokesh GagnaniNo ratings yet
- Systematic Procedure To Problem Solving by An Operation Research Team. (2) Degeneracy and Cycling in Linear Programming ProblemDocument2 pagesSystematic Procedure To Problem Solving by An Operation Research Team. (2) Degeneracy and Cycling in Linear Programming ProblemLokesh GagnaniNo ratings yet
- Set2 - Transport & NetworkDocument155 pagesSet2 - Transport & NetworkLokesh GagnaniNo ratings yet
- Ajt QBDocument3 pagesAjt QBLokesh GagnaniNo ratings yet
- Web Spoofing: by Miguel and NganDocument13 pagesWeb Spoofing: by Miguel and NganLokesh GagnaniNo ratings yet
- Problems and Exercises in Operations ResearchDocument33 pagesProblems and Exercises in Operations ResearchKaye BaguilodNo ratings yet
- Java Database Connectivity: Session 16Document28 pagesJava Database Connectivity: Session 16Lokesh GagnaniNo ratings yet
- 80's Anime Aesthetic TutorialDocument6 pages80's Anime Aesthetic TutorialJaneNo ratings yet
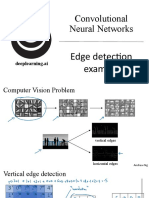
- Convolutional Neural Networks: Edge Detection ExampleDocument4 pagesConvolutional Neural Networks: Edge Detection Exampleh_shatNo ratings yet
- Basics of Adobe Photoshop Tools and Photo Editing TechniquesDocument266 pagesBasics of Adobe Photoshop Tools and Photo Editing TechniquesDrago MirNo ratings yet
- Module 4 Empowerment Technologies 12 FINALDocument8 pagesModule 4 Empowerment Technologies 12 FINALMary Joyce CruzNo ratings yet
- Comparison Descartes ContextCaptureEditorDocument1 pageComparison Descartes ContextCaptureEditoroscarcmNo ratings yet
- Gao 2021Document4 pagesGao 2021Peruru Famida NajumunNo ratings yet
- ACOGAUBbulletin PDFDocument1,122 pagesACOGAUBbulletin PDFFederico Fernandez TabordaNo ratings yet
- Volen Cherkezov Portfolio 2013Document8 pagesVolen Cherkezov Portfolio 2013motorheadzzzNo ratings yet
- Unit II Windowing and ClippingDocument36 pagesUnit II Windowing and ClippingSuhasNo ratings yet
- Advanced Digital Image Processing-QBDocument2 pagesAdvanced Digital Image Processing-QBSiva Dharshan ValuvanNo ratings yet
- جميع اسئلة الرؤياDocument13 pagesجميع اسئلة الرؤياamnaalbadrani7No ratings yet
- Digital Image Processing Using Noise Removal Technique A Non-Linear ApproachDocument5 pagesDigital Image Processing Using Noise Removal Technique A Non-Linear ApproachMuhammad Mazhar BashirNo ratings yet
- Features: Medical Image RegistrationDocument4 pagesFeatures: Medical Image RegistrationWill SmithNo ratings yet
- Assignment 2Document7 pagesAssignment 2Muhammad Zakwan Arif Bin Muhammad TajuddinNo ratings yet
- Module 3Document44 pagesModule 3Aswin SasikumarNo ratings yet
- 209) (Computer Graphics) : Institute of and TechnologyDocument1 page209) (Computer Graphics) : Institute of and TechnologyRam PrasadNo ratings yet
- Univ QuestionsDocument16 pagesUniv QuestionsSanthosh PaNo ratings yet
- LG 50PZ950 CNET Review Calibration ResultsDocument7 pagesLG 50PZ950 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Chapter 2. Digital Image FundamentalsDocument56 pagesChapter 2. Digital Image FundamentalsĐức Minh BùiNo ratings yet
- LG 47LW5600 CNET Review Calibration ResultsDocument7 pagesLG 47LW5600 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Ip4digital Image Processing 15ec72 Module 4Document71 pagesIp4digital Image Processing 15ec72 Module 4RAJSHEKHAR PATILNo ratings yet
- RAWguideDocument14 pagesRAWguideJeNo ratings yet
- Ficha Tecnica Casco QHR6 Safari RadiansDocument4 pagesFicha Tecnica Casco QHR6 Safari RadiansNelson QuishpeNo ratings yet
- Proyecciones en Dibujo Tecnico MecánicoDocument4 pagesProyecciones en Dibujo Tecnico MecánicoOscarArteagaNo ratings yet
- Fundamentals of DIPDocument8 pagesFundamentals of DIPNeeraj IdnaniNo ratings yet