You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Transmission Lines and Wave Guides Ec 1305Document27 pagesTransmission Lines and Wave Guides Ec 1305ainugiri67% (3)
- It1252 Digital Signal ProcessingDocument22 pagesIt1252 Digital Signal ProcessingainugiriNo ratings yet
- Computer ArchitectureDocument100 pagesComputer ArchitectureainugiriNo ratings yet
- Wireless Local Area NetworkDocument331 pagesWireless Local Area Networkainugiri100% (2)
- Ge6075 Professional Ethics in EngineeringDocument47 pagesGe6075 Professional Ethics in Engineeringainugiri100% (1)
- CS1601 Computer ArchitectureDocument389 pagesCS1601 Computer Architectureainugiri100% (1)
- Updates Resume Giri PrasadDocument4 pagesUpdates Resume Giri PrasadainugiriNo ratings yet
- Sockets NotesDocument15 pagesSockets Notesom18sahuNo ratings yet
- The Anatomy of The GridDocument2 pagesThe Anatomy of The GridainugiriNo ratings yet
- 07 11 04Document224 pages07 11 04xenocid3rNo ratings yet
- RTP SlidesDocument42 pagesRTP Slidesainugiri0% (1)
- Microwave Engineering Ec 432Document25 pagesMicrowave Engineering Ec 432ainugiriNo ratings yet
- Theoretical Study of Cache Systems: Dmitry DolgikhDocument17 pagesTheoretical Study of Cache Systems: Dmitry DolgikhainugiriNo ratings yet
- Cache FundamentalsDocument4 pagesCache FundamentalsainugiriNo ratings yet
- PHD Thesis Ef Cient Algorithms For Sorting andDocument115 pagesPHD Thesis Ef Cient Algorithms For Sorting andGabryel BogdanNo ratings yet
- Peterson's Algorithm in A Multi Agent Database SystemDocument14 pagesPeterson's Algorithm in A Multi Agent Database SystemainugiriNo ratings yet
- Javaserver Faces (JSF) OverviewDocument57 pagesJavaserver Faces (JSF) OverviewGirishNo ratings yet
- EC1402 Optical CommunicationDocument25 pagesEC1402 Optical CommunicationarunecethebossNo ratings yet
- Computer Arch and Operating SysDocument53 pagesComputer Arch and Operating SysainugiriNo ratings yet
- JSFDocument21 pagesJSFNelson PinheiroNo ratings yet
- Java White Paper Description: Simple Object-Oriented Distributed Interpreted Robust SecureDocument8 pagesJava White Paper Description: Simple Object-Oriented Distributed Interpreted Robust SecureainugiriNo ratings yet
- It 1202 - Principles of CommunicationDocument20 pagesIt 1202 - Principles of CommunicationainugiriNo ratings yet
- Get Ready For Session 1Document2 pagesGet Ready For Session 1ainugiriNo ratings yet
- How To Write Your Own Js F ComponentsDocument32 pagesHow To Write Your Own Js F ComponentsKondalarao SuravarapuNo ratings yet
- CP Uvr 1601e1 HCDocument5 pagesCP Uvr 1601e1 HCAnuj singhNo ratings yet
- 21st-Century-Cbc - BEAUTY CAREDocument76 pages21st-Century-Cbc - BEAUTY CAREjazzy mallariNo ratings yet
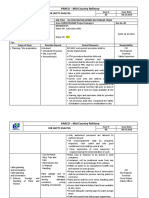
- PARCO - Mid Country Refinery: Job Safety AnalysisDocument6 pagesPARCO - Mid Country Refinery: Job Safety AnalysisGyanendra Narayan NayakNo ratings yet
- (Currirulum Vitae) Cung Duc KienDocument5 pages(Currirulum Vitae) Cung Duc KienKiên CungNo ratings yet
- Tunisia ZarzaitineDocument1 pageTunisia ZarzaitineJonas lumbuNo ratings yet
- Rem 1 225Document110 pagesRem 1 225MaanNo ratings yet
- Lattice AttackDocument18 pagesLattice AttackEb100% (1)
- RDF302Document62 pagesRDF302EC外判No ratings yet
- Downloaded From Manuals Search EngineDocument105 pagesDownloaded From Manuals Search EngineOleksandr PlotnykovNo ratings yet
- DS 02995Document2 pagesDS 02995Giovanni ValentinoNo ratings yet
- AmiNet and AVN Configuration ManualDocument17 pagesAmiNet and AVN Configuration Manualskrab0fixNo ratings yet
- Order Detail - SSENSEDocument2 pagesOrder Detail - SSENSEtaverns.keeps-0nNo ratings yet
- Submitted by Zully Conde DiazDocument6 pagesSubmitted by Zully Conde DiazzullyNo ratings yet
- Listening - PhotosDocument29 pagesListening - PhotosKurnihayati MuklasNo ratings yet
- Bad Debts Recovered Some TimesDocument4 pagesBad Debts Recovered Some TimesBRAINSTORM Haroon RasheedNo ratings yet
- Use of Biotechnology in Agriculture-Benefits and RisksDocument6 pagesUse of Biotechnology in Agriculture-Benefits and RisksmortezahNo ratings yet
- Strategy and LogisticsDocument49 pagesStrategy and Logisticsnicco.deca123No ratings yet
- Ebooks and Printed Textbooks Students Ordering ProceduresDocument3 pagesEbooks and Printed Textbooks Students Ordering ProceduresSean Menard FloresNo ratings yet
- 1011602-EI-2.0 Conexión PowerSwing SP33-MDocument1 page1011602-EI-2.0 Conexión PowerSwing SP33-Mdavidmontesgarci92No ratings yet
- Action Plan: Part Iv: Development PlansDocument66 pagesAction Plan: Part Iv: Development PlansJenalyn Labuac MendezNo ratings yet
- Spectral FFT Max Ms PDocument17 pagesSpectral FFT Max Ms Phockey66patNo ratings yet
- 1 Reactive Windshear: 1.1 Before V1Document7 pages1 Reactive Windshear: 1.1 Before V1Τσαμπίκος ΒαρέληςNo ratings yet
- 2 PlanningDocument13 pages2 PlanningDeva RajNo ratings yet
- A Literature Survey of Benchmark Functions For Global Optimisation Problems PDFDocument45 pagesA Literature Survey of Benchmark Functions For Global Optimisation Problems PDFAmreen KhanNo ratings yet
- 101 Timeless Supper Club Business Name Ideas You Can UseDocument4 pages101 Timeless Supper Club Business Name Ideas You Can UseELS Labor ConsultantsNo ratings yet
- Maasai Agreement1904Document4 pagesMaasai Agreement1904Murigi KamandeNo ratings yet
- Q. Papers ME2015 PDFDocument1,669 pagesQ. Papers ME2015 PDFKamleshNo ratings yet
- Intertek Gulf Region-Training Calendar - H1 2022Document1 pageIntertek Gulf Region-Training Calendar - H1 2022AL-Jafar Yasser MNo ratings yet
- NABAKEM Welding SuppliesDocument6 pagesNABAKEM Welding Suppliessutrisno00No ratings yet
- SECTION 01 45 35 Special InspectionsDocument16 pagesSECTION 01 45 35 Special InspectionsJuanPaoloYbañezNo ratings yet