You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Finnwood HelpDocument137 pagesFinnwood HelpAl GaleNo ratings yet
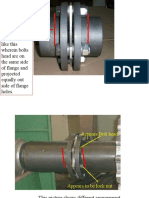
- Please Note The Assembly Should Appear Like This Wherein Bolts Head Are On The Same Side of Flange and Projected Equally Out Side of Flange HolesDocument3 pagesPlease Note The Assembly Should Appear Like This Wherein Bolts Head Are On The Same Side of Flange and Projected Equally Out Side of Flange HolesAnonymous OFP2ygPIdNo ratings yet
- Please Supply Dimensions Using Correct Sketch: - : Parallel To Axis Parallel To Bore Taper Key DetailsDocument1 pagePlease Supply Dimensions Using Correct Sketch: - : Parallel To Axis Parallel To Bore Taper Key DetailsAnonymous OFP2ygPIdNo ratings yet
- Termowell MTRL Selection GuideDocument9 pagesTermowell MTRL Selection GuideAnonymous OFP2ygPIdNo ratings yet
- Action Tracker TemplateDocument12 pagesAction Tracker TemplateAnonymous OFP2ygPIdNo ratings yet
- Chemtrol Samil - Instrument D/SDocument48 pagesChemtrol Samil - Instrument D/SAnonymous OFP2ygPIdNo ratings yet
- Engineering Drawing NotesDocument81 pagesEngineering Drawing NotesAnonymous OFP2ygPIdNo ratings yet
- Chapter 11 Thread FastenerDocument55 pagesChapter 11 Thread FastenerREan ANandNo ratings yet
- Otc19676 SurfDocument0 pagesOtc19676 SurfAnonymous OFP2ygPIdNo ratings yet
- Pipeline Stability On The SeabedDocument19 pagesPipeline Stability On The SeabedAnonymous OFP2ygPIdNo ratings yet
- Air Fin Cooler DesignDocument3 pagesAir Fin Cooler DesignAnonymous OFP2ygPIdNo ratings yet
- Compressor BearingsDocument55 pagesCompressor BearingsAnonymous OFP2ygPId100% (1)
- PR Drop Across Orifice DP Psi 458.5 48.8Document1 pagePR Drop Across Orifice DP Psi 458.5 48.8Anonymous OFP2ygPIdNo ratings yet
- Acoustic Positioning SystemsDocument16 pagesAcoustic Positioning SystemsSharon FreemanNo ratings yet
- Theoretical Calculation For Joint Efficiency: Flowserve Sanmar LTDDocument1 pageTheoretical Calculation For Joint Efficiency: Flowserve Sanmar LTDAnonymous OFP2ygPIdNo ratings yet
- My Excel Gantt ChartDocument20 pagesMy Excel Gantt ChartAnonymous OFP2ygPIdNo ratings yet
- Fastener TheoryDocument4 pagesFastener TheoryAnonymous OFP2ygPIdNo ratings yet
- 4 - Subsea ProcessingDocument52 pages4 - Subsea ProcessingLeandro Fagundes100% (2)
- Indian Codes - Steel Design Per IS 800:2007Document3 pagesIndian Codes - Steel Design Per IS 800:2007dineshNo ratings yet
- Eccentric Braced Steel Frames For Wind and Low-to-Moderate Seismic LoadsDocument24 pagesEccentric Braced Steel Frames For Wind and Low-to-Moderate Seismic LoadsBùi Văn HợpNo ratings yet
- Chapter-4 Design of Column & Column BaseDocument26 pagesChapter-4 Design of Column & Column Basezakai zakiNo ratings yet
- Nonlinear Frame Finite Elements in OpenSeesDocument40 pagesNonlinear Frame Finite Elements in OpenSeesMostafa NouhNo ratings yet
- Ballscrew Catalog: Precision Motion Industries, IncDocument45 pagesBallscrew Catalog: Precision Motion Industries, IncManoj ChepeNo ratings yet
- The Spring CharacteristicDocument4 pagesThe Spring CharacteristicBharatiyulam100% (1)
- Crane Girder Design ProcedureDocument18 pagesCrane Girder Design ProcedureBhadresh Shah0% (1)
- Course On Structural StabilityDocument3 pagesCourse On Structural StabilityVenkatesh ReddyNo ratings yet
- CADRE Analysis of Geodesic Dome PDFDocument36 pagesCADRE Analysis of Geodesic Dome PDFFrancisco Javier Torres AlvaradoNo ratings yet
- Stability Analysis of Columns With Variable Cross-Sections 1st Two Pages Placed LastDocument12 pagesStability Analysis of Columns With Variable Cross-Sections 1st Two Pages Placed LastIntishar RahmanNo ratings yet
- Calculation of Working Pressure For Cylindrical Vessel Under External PressureDocument7 pagesCalculation of Working Pressure For Cylindrical Vessel Under External Pressuremiftahul hidayahNo ratings yet
- Torsion in Structural DesignDocument73 pagesTorsion in Structural Designjakeer7100% (1)
- Leseprobe Design of Steel Plated Structures With Finite ElementsDocument19 pagesLeseprobe Design of Steel Plated Structures With Finite ElementsWang MaxNo ratings yet
- 2001 - 03 Large Seismic Steel Beam To Column ConnectionsDocument49 pages2001 - 03 Large Seismic Steel Beam To Column ConnectionsHenry HoyosNo ratings yet
- Duaso With AnsDocument40 pagesDuaso With AnsJohn Paul Coñge Ramos100% (1)
- Combined Stresses and Mohr'S Circle: James Doane, PHD, PeDocument41 pagesCombined Stresses and Mohr'S Circle: James Doane, PHD, PeChristineNo ratings yet
- Steel Beam Slab Support MukonoDocument4 pagesSteel Beam Slab Support Mukonosoly2k12No ratings yet
- Ad 0646221Document216 pagesAd 0646221aae15904No ratings yet
- Calculations Tank S6Document19 pagesCalculations Tank S6Joshue Adele100% (1)
- Mohammed Arega PDFDocument81 pagesMohammed Arega PDFephremNo ratings yet
- AppendixIXTankAssessmentRev1April2012 PDFDocument230 pagesAppendixIXTankAssessmentRev1April2012 PDFappril26No ratings yet
- Is 2210 PDFDocument18 pagesIs 2210 PDFShailendra ArunNo ratings yet
- Intro To Design of BridgesDocument9 pagesIntro To Design of Bridgesarunkumar.mgsNo ratings yet
- Static Web Moment ConnectionsDocument43 pagesStatic Web Moment ConnectionsAlejandro SantiagoNo ratings yet
- Kagome Lattice StructuresDocument7 pagesKagome Lattice StructuresMatijaNo ratings yet
- Buckling Load Predictions in Pressure Vesseld Utilizing Monte Carlo MethosDocument113 pagesBuckling Load Predictions in Pressure Vesseld Utilizing Monte Carlo MethosMayra ZezattiNo ratings yet
- Composite TpeDocument11 pagesComposite TpeAnyah Sampson ObassiNo ratings yet
- Form Finding and Fabric Forming in The Work of Heinz IslerDocument8 pagesForm Finding and Fabric Forming in The Work of Heinz IslerLou Cy BorgNo ratings yet
- 1 Composite Beam Theory: Developed by Scott Civjan University of Massachusetts, AmherstDocument27 pages1 Composite Beam Theory: Developed by Scott Civjan University of Massachusetts, Amherstsaleemm_2No ratings yet