You might also like
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- Assignment Booklet: B. Tech. in Aerospace Engineering ProgrammeDocument7 pagesAssignment Booklet: B. Tech. in Aerospace Engineering ProgrammeSomen BagNo ratings yet
- Lammps Detail CommandDocument15 pagesLammps Detail CommandSourav SahaNo ratings yet
- Answering Technique Physics Paper-3Document10 pagesAnswering Technique Physics Paper-3Ng Wan LinNo ratings yet
- 2013 Form 4 Am Teaching Scheme (Edit)Document11 pages2013 Form 4 Am Teaching Scheme (Edit)Salasiah IsmailNo ratings yet
- Hec Ras ExampleDocument10 pagesHec Ras ExampleJorge Neira CisternaNo ratings yet
- (Ebook) - Engineering - Patran Nastran Student TutorialDocument72 pages(Ebook) - Engineering - Patran Nastran Student TutorialnooraniaNo ratings yet
- Semester 2, Electrical Engineering Paper (UOM)Document6 pagesSemester 2, Electrical Engineering Paper (UOM)RuchirangaNo ratings yet
- MA2001N Differential Equations: Lecture Notes For Weeks 9, 10 and 11Document8 pagesMA2001N Differential Equations: Lecture Notes For Weeks 9, 10 and 11Temesgen BihonegnNo ratings yet
- Introduction To Linear EquationsDocument16 pagesIntroduction To Linear EquationsAbel TaddeleNo ratings yet
- 13S1 FE1073 C2-Deformation of Elastic BodyDocument8 pages13S1 FE1073 C2-Deformation of Elastic BodyglenlcyNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- II - I - 2013 RegulationDocument8 pagesII - I - 2013 RegulationJithendra NathNo ratings yet
- Matlab Programming For EngineersDocument39 pagesMatlab Programming For EngineersAdli AmiraNo ratings yet
- Direct Digital Synthesizer: Design of ROMDocument53 pagesDirect Digital Synthesizer: Design of ROMYermakov Vadim IvanovichNo ratings yet
- Matlab Exam Practice ProblemsDocument5 pagesMatlab Exam Practice ProblemsAnonymous 55cH67eIx100% (1)
- Mailam Engineering College: Unit-III (2 & 16 Marks)Document10 pagesMailam Engineering College: Unit-III (2 & 16 Marks)Subathra Devi MourouganeNo ratings yet
- 4.1.1 Element Types: Section 4.2 Section 4.39Document5 pages4.1.1 Element Types: Section 4.2 Section 4.39pravnvnNo ratings yet
- Project 2 - Patch Antenna Far-Field Pattern Calculation in MATLAB (May 2015)Document17 pagesProject 2 - Patch Antenna Far-Field Pattern Calculation in MATLAB (May 2015)Stephen J. WattNo ratings yet
- UG Syllabus 2010 11 NITtDocument33 pagesUG Syllabus 2010 11 NITtNitin VarmanNo ratings yet
- I.S.F.D y T. #103: Profesorado de Técnicos Prof: Martín MellerDocument11 pagesI.S.F.D y T. #103: Profesorado de Técnicos Prof: Martín MellerAriel LeucipoNo ratings yet
- B.Tech Degree Examination: Sixth Semester Branch: Information TechnologyDocument6 pagesB.Tech Degree Examination: Sixth Semester Branch: Information TechnologyAbhishek PrakashNo ratings yet
- MR/ Channel Mode Vfo/ Frequency Mode Separate Vfo A & B Settings Stored Onaper Channel BasisDocument9 pagesMR/ Channel Mode Vfo/ Frequency Mode Separate Vfo A & B Settings Stored Onaper Channel BasisL Duane BrandNo ratings yet
- Semester 2 of Secondary IDocument2 pagesSemester 2 of Secondary Iapi-233821431No ratings yet
- E-401 Electro Magnetics: 1. Vector AnalysisDocument6 pagesE-401 Electro Magnetics: 1. Vector AnalysisvagoliyoNo ratings yet
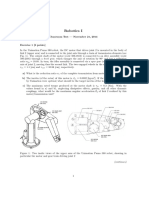
- Robotics I: Jt2 Motor 506-1612Document8 pagesRobotics I: Jt2 Motor 506-1612asalifew belachewNo ratings yet
- MAT 105 SyllabusDocument2 pagesMAT 105 SyllabusAnkit SinghNo ratings yet
- Targate-Maths Booklet (Non Dowloadable)Document102 pagesTargate-Maths Booklet (Non Dowloadable)Sonal Kumar AgrawalNo ratings yet
- U4 23 04Document17 pagesU4 23 04lbo33No ratings yet
- FEM Notes5Document65 pagesFEM Notes5Debasis SahaNo ratings yet
- ECC PT1 (12) 040 Orange SeamcatDocument3 pagesECC PT1 (12) 040 Orange SeamcatRina PuspitasariNo ratings yet
- MATLAB Codes For Finite Element AnalysisDocument8 pagesMATLAB Codes For Finite Element AnalysisJenatyNo ratings yet
- University SyllabusDocument129 pagesUniversity SyllabusHari NarayananNo ratings yet
- Lab 13Document9 pagesLab 13abhishek1028No ratings yet
- Solving ODEs Using Taylor Series ..Document25 pagesSolving ODEs Using Taylor Series ..asfimalikNo ratings yet
- EE 312 Lecture 4Document17 pagesEE 312 Lecture 4دكتور كونوهاNo ratings yet
- Lecture On Advanced Mathematical TechnquesDocument39 pagesLecture On Advanced Mathematical TechnquesDebayan GuptaNo ratings yet
- Problem Statement: One River Reach (River TREEO, Reach Main) DischargesDocument10 pagesProblem Statement: One River Reach (River TREEO, Reach Main) Dischargesrajesh005No ratings yet
- Report Writing TemplateDocument13 pagesReport Writing Templatesujan_duttaNo ratings yet
- FEmetDocument58 pagesFEmetHamed MemarianNo ratings yet
- Formatting A Table in APA StyleDocument11 pagesFormatting A Table in APA StyleMarcial Bonnie Madla SalacNo ratings yet
- Author Instructions For Typeset Journals, Manuals, and Some Special Technical Publications (STPS)Document10 pagesAuthor Instructions For Typeset Journals, Manuals, and Some Special Technical Publications (STPS)Tamtam AdayoNo ratings yet
- Global Info Display: V1.1 - RfactorDocument34 pagesGlobal Info Display: V1.1 - RfactorLucioNo ratings yet
- Sheet Metal Corner Seams and ReliefsDocument15 pagesSheet Metal Corner Seams and ReliefsVICTORSJNo ratings yet
- Solutions To Second Homework Assignment: ME 692 - Computational Fluid DynamicsDocument5 pagesSolutions To Second Homework Assignment: ME 692 - Computational Fluid DynamicsRaheel Ahmed KhanNo ratings yet
- Natural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthDocument9 pagesNatural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthAleksandar Nikolic100% (1)
- Answer All Questions in This SectionDocument2 pagesAnswer All Questions in This SectionmasyatiNo ratings yet
- Digital Lab ManualDocument93 pagesDigital Lab ManualWesley GoldenNo ratings yet
- I. Shareware Ii. PHP: Informatics Practices (065) Sample Question Paper - 1Document17 pagesI. Shareware Ii. PHP: Informatics Practices (065) Sample Question Paper - 1Arjun PrasadNo ratings yet
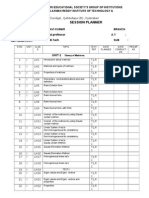
- 77babseesion Plan MetrologyDocument4 pages77babseesion Plan Metrologyroses4happinessNo ratings yet
- K S R Institute For Engineering and Technology: Prepared by Approved by (M.A Stephenraj) (HOD/EEE)Document2 pagesK S R Institute For Engineering and Technology: Prepared by Approved by (M.A Stephenraj) (HOD/EEE)Ryan MillerNo ratings yet
- B.tech (Hons) Electrical2003Document21 pagesB.tech (Hons) Electrical2003Bilal ShahidNo ratings yet
- Electronic Devices and Circuit End TERMDocument2 pagesElectronic Devices and Circuit End TERMDinesh PudasainiNo ratings yet
- What Is Geometric Transformation?: Unit Ii I TDocument6 pagesWhat Is Geometric Transformation?: Unit Ii I Tjayj_5No ratings yet
- Session Planner: UNIT-1Document5 pagesSession Planner: UNIT-1rajularamNo ratings yet
- Sample FileDocument9 pagesSample FileBoni CarreraNo ratings yet
- Syllabus TE Computer Engineering 2012courseDocument35 pagesSyllabus TE Computer Engineering 2012courseAmolModiNo ratings yet
- Advanced Numerical Methods with Matlab 2: Resolution of Nonlinear, Differential and Partial Differential EquationsFrom EverandAdvanced Numerical Methods with Matlab 2: Resolution of Nonlinear, Differential and Partial Differential EquationsNo ratings yet
- Score Sheet For ME 120 Oral PresentationDocument1 pageScore Sheet For ME 120 Oral Presentationwumbo6No ratings yet
- ME285 Lecture Day1Document14 pagesME285 Lecture Day1wumbo6No ratings yet
- ME192 Exam 1Document7 pagesME192 Exam 1wumbo6No ratings yet
- Progress (Status) Report Format: - Cover - IntroductiDocument5 pagesProgress (Status) Report Format: - Cover - Introductiwumbo6No ratings yet
- ME 192 Review Guide For Exam#1 (Wednesday, March 9, 2005) (Chapter 1 - 4) - in Class PartDocument1 pageME 192 Review Guide For Exam#1 (Wednesday, March 9, 2005) (Chapter 1 - 4) - in Class Partwumbo6No ratings yet
- ME192 Exam 1Document5 pagesME192 Exam 1wumbo6No ratings yet
- 2013 ME192 HW 2 SolutionsDocument3 pages2013 ME192 HW 2 Solutionswumbo6No ratings yet
- Previous QuizDocument1 pagePrevious Quizwumbo6No ratings yet
- ME147 Solution1 HW F13 PDFDocument3 pagesME147 Solution1 HW F13 PDFwumbo6No ratings yet