You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hardness TestDocument20 pagesHardness TestJake Tee Hon YiNo ratings yet
- SmartForm - Invoice TutorialDocument17 pagesSmartForm - Invoice TutorialShelly McRay100% (5)
- Mechanisms in Modern Engineering V2 Pt2Document448 pagesMechanisms in Modern Engineering V2 Pt2drpisson100% (1)
- Exploit DevelopDocument63 pagesExploit DevelopmueenNo ratings yet
- Sem 3 Final Minor Project BajajDocument43 pagesSem 3 Final Minor Project Bajajkeshav sabooNo ratings yet
- Almighty Military Format Revised by Welbeck (Male)Document11 pagesAlmighty Military Format Revised by Welbeck (Male)jadenroy442No ratings yet
- Journal of Air Transport Management Volume 8 Issue 4 2002 (Doi 10.1016 - s0969-6997 (02) 00003-0) Graham Francis Ian Humphreys Jackie Fry - The Benchmarking of Airport Performance PDFDocument9 pagesJournal of Air Transport Management Volume 8 Issue 4 2002 (Doi 10.1016 - s0969-6997 (02) 00003-0) Graham Francis Ian Humphreys Jackie Fry - The Benchmarking of Airport Performance PDFPhan Thành TrungNo ratings yet
- σcosθ ρgd σ = surface tension in N/m θ = wetting angle, 0 for water d = diameter of tube in m ρ = density of fluidDocument1 pageσcosθ ρgd σ = surface tension in N/m θ = wetting angle, 0 for water d = diameter of tube in m ρ = density of fluidJustine Ejay MoscosaNo ratings yet
- Blood SpatterDocument13 pagesBlood SpatterGabriel Stossel (2020)No ratings yet
- PDF Document (19145109)Document354 pagesPDF Document (19145109)Red ShirtNo ratings yet
- Listening Exams Answer Key: Listening Exam 1 Listening Exam 5Document2 pagesListening Exams Answer Key: Listening Exam 1 Listening Exam 5MariaNo ratings yet
- Analysis Process Designer (APD) Part23 - 12 PDFDocument19 pagesAnalysis Process Designer (APD) Part23 - 12 PDFAshok ReddyNo ratings yet
- Accomplishment Clubs ProjectDocument3 pagesAccomplishment Clubs Projectshai24No ratings yet
- Chapter 10 - The Design ProcessDocument18 pagesChapter 10 - The Design Processapi-344619776No ratings yet
- Mongo DatatablesDocument9 pagesMongo DatatablesJames O'HaraNo ratings yet
- Magallanes National Vocational High SchoolDocument2 pagesMagallanes National Vocational High SchoolJohn Arol De LeonNo ratings yet
- SVS Teachers PDFDocument6 pagesSVS Teachers PDFjanardhanNo ratings yet
- CMO Previous Year For Class 5Document10 pagesCMO Previous Year For Class 5swarg1232172No ratings yet
- Introduction To Statistics and Data AnalysisDocument108 pagesIntroduction To Statistics and Data AnalysisVINCENT PAOLO RAMOSNo ratings yet
- Mpspre TestnewDocument17 pagesMpspre TestnewMAE LOVE NABARRONo ratings yet
- Object Detection in A Cluttered Scene Using Point Feature MatchingDocument2 pagesObject Detection in A Cluttered Scene Using Point Feature MatchingRoopali TharanipathyNo ratings yet
- Biophysics of CHEMICAL SENSES: Taste and Smell: Ligand-Receptor InteractionDocument26 pagesBiophysics of CHEMICAL SENSES: Taste and Smell: Ligand-Receptor InteractionATP_101No ratings yet
- Potential User Control Feature Parameter DescriptionDocument14 pagesPotential User Control Feature Parameter DescriptionmariewanNo ratings yet
- Script For Installation of Club OfficersDocument3 pagesScript For Installation of Club OfficersShreeniwas SharmaNo ratings yet
- 5 HotsDocument16 pages5 HotsJeffrey Ramos100% (1)
- Latihan NormalisasiDocument3 pagesLatihan NormalisasiFadil0% (1)
- TVL Illustration Week 4Document15 pagesTVL Illustration Week 4Victor Moraca Sinangote0% (1)
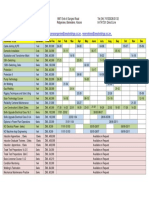
- Technical Training Calendar 20220122Document1 pageTechnical Training Calendar 20220122Lawson Shumirai Sango100% (1)
- Farmers' Income: Will India Be Able To Double It in Next 5 Years?Document57 pagesFarmers' Income: Will India Be Able To Double It in Next 5 Years?Jugal PatelNo ratings yet
- The Barcelona ModelDocument43 pagesThe Barcelona ModelNicholas SocratesNo ratings yet