
NC CNC Conventional by SK Mondal
NC CNC Conventional by SK Mondal
You might also like
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0From EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Rating: 5 out of 5 stars5/5 (1)
- WI - Intermediate Check BalanceDocument2 pagesWI - Intermediate Check Balancechinhon83% (6)
- Computer Assisted Part ProgrammingDocument21 pagesComputer Assisted Part ProgrammingSanthan SalaiNo ratings yet
- Robot Specifications - Robot ProgrammingDocument54 pagesRobot Specifications - Robot ProgrammingPriyanshu NainNo ratings yet
- BullseyeDocument4 pagesBullseyeRuben CuevasNo ratings yet
- Scope:: Last and First Name: Student IdDocument4 pagesScope:: Last and First Name: Student Idb7663664No ratings yet
- Autocad Lab ManualDocument24 pagesAutocad Lab Manualmadhu.ammu112No ratings yet
- NC, CNC & Robotics PDFDocument100 pagesNC, CNC & Robotics PDFSiddhrajsinh ZalaNo ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- NC and CNC MachinesDocument25 pagesNC and CNC MachinesSabiha Hajdarbegović-HafizovićNo ratings yet
- Project Construction: 3.1 HC-05 Bluetooth To Serial Port ModuleDocument8 pagesProject Construction: 3.1 HC-05 Bluetooth To Serial Port Moduleanugya sharmaNo ratings yet
- Heidenhain TNC BasicDocument175 pagesHeidenhain TNC BasicReymondo Bundoc100% (2)
- Unit - III CNC Part ProgrammingDocument39 pagesUnit - III CNC Part ProgrammingNarayana PerumalNo ratings yet
- Computer Assisted Part Programming (APT, Automatically Programmed Tool)Document40 pagesComputer Assisted Part Programming (APT, Automatically Programmed Tool)kumareshNo ratings yet
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Document13 pagesMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoNo ratings yet
- Robotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot ProgrammingDocument30 pagesRobotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot Programmingmksamy2021No ratings yet
- Numerical ControlDocument36 pagesNumerical ControlsaishvNo ratings yet
- Introduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)Document20 pagesIntroduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)thanh_cdt01No ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot CoursesAmla SingNo ratings yet
- Design of A Full Adder Using PTL and GDI TechniqueDocument6 pagesDesign of A Full Adder Using PTL and GDI TechniqueIJARTETNo ratings yet
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsDocument5 pagesA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanNo ratings yet
- UNIT II System SoftwareDocument11 pagesUNIT II System SoftwareArulmozhi ManoharanNo ratings yet
- CH 8 Industrial RoboticsDocument39 pagesCH 8 Industrial RoboticsDeepak PathakNo ratings yet
- Welcome !!! METE 284 P3-C1Document20 pagesWelcome !!! METE 284 P3-C1Shane Michael BacalsoNo ratings yet
- Computer Aided Part ProgrammingDocument19 pagesComputer Aided Part ProgrammingPiyush Aggarwal100% (4)
- AutoCad Basic Commands PDFDocument34 pagesAutoCad Basic Commands PDFspacejuyNo ratings yet
- Apt PDFDocument45 pagesApt PDFJignesh Rohit0% (1)
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument51 pagesWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraNo ratings yet
- CNC Project FullDocument22 pagesCNC Project FullDebabrata NandaNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- A Line Follower Robot-ICCAE 2010Document6 pagesA Line Follower Robot-ICCAE 2010Ioan DorofteiNo ratings yet
- Omron Cp1e PDFDocument45 pagesOmron Cp1e PDFSuzaini SupingatNo ratings yet
- TNC 430 HeidenhainDocument362 pagesTNC 430 HeidenhainCao ThanhNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemHoomi ShbNo ratings yet
- Harshit Robotics 10Document13 pagesHarshit Robotics 10harshitkargathara21No ratings yet
- Laboratory Manual CamDocument22 pagesLaboratory Manual CamSahil TanweerNo ratings yet
- NC CNC DNC FMS TheoryDocument21 pagesNC CNC DNC FMS Theorykamleshyadavmoney100% (1)
- XrotorDocument21 pagesXrotorFrancesco ReaNo ratings yet
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pages3 Waukesha Gas Engine Maintenance ManualMamunNo ratings yet
- CNC Basic & Prog.Document89 pagesCNC Basic & Prog.Christine BrownNo ratings yet
- Robotics Model QuestionsDocument3 pagesRobotics Model QuestionsAnjan Kumar KantepalliNo ratings yet
- Ch-11 NC CNC DNC FMS Automation and RoboticsDocument143 pagesCh-11 NC CNC DNC FMS Automation and RoboticsshafiqNo ratings yet
- Design Implementation and Control of A H PDFDocument11 pagesDesign Implementation and Control of A H PDFNikhil HasabiNo ratings yet
- Computer Aided Manufacturing (EME031)Document4 pagesComputer Aided Manufacturing (EME031)Hemant PalNo ratings yet
- RoboticsDocument26 pagesRoboticsmkmnawaz972No ratings yet
- An Instruction Set For The Efficient Implementation of The Cordic AlgorithmDocument4 pagesAn Instruction Set For The Efficient Implementation of The Cordic AlgorithmNaveen JainNo ratings yet
- 254464.1 Car Mikac VezaDocument6 pages254464.1 Car Mikac VezaengrodeNo ratings yet
- What Are The Storage Devices in CAD?Document23 pagesWhat Are The Storage Devices in CAD?shunmugeshNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- NCERT Class 6 Political ScienceDocument80 pagesNCERT Class 6 Political ScienceNITIN KUMAR SHARMANo ratings yet
- Engineering Mechanics Question and Answers For GATE IAS PDFDocument37 pagesEngineering Mechanics Question and Answers For GATE IAS PDFshiv kr dubey100% (1)
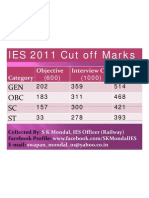
- IES 2011 Cut Off Marks Engineering Service Cutoff MarksDocument1 pageIES 2011 Cut Off Marks Engineering Service Cutoff MarksKBSMANITNo ratings yet
- Thermodynamics P K Nag Exercise Unsolved Problems SolvedDocument265 pagesThermodynamics P K Nag Exercise Unsolved Problems SolvedRavinder Antil90% (40)
- Oath & Code of Ethics of A PharmacistDocument9 pagesOath & Code of Ethics of A PharmacistROSE ANN C. CHICONo ratings yet
- Ofcom Site Blocking Report With Redactions RemovedDocument56 pagesOfcom Site Blocking Report With Redactions RemovedTJ McIntyreNo ratings yet
- Waste Management PlanDocument37 pagesWaste Management PlankimgNo ratings yet
- Software Testing ConceptsDocument10 pagesSoftware Testing ConceptsHarivelan GnanavelNo ratings yet
- SsssDocument1 pageSssssooraj kumarNo ratings yet
- Partnership Accounting PDFDocument4 pagesPartnership Accounting PDFPamela BugarsoNo ratings yet
- Sat. Com (R20) Unit-3Document11 pagesSat. Com (R20) Unit-3kavuri indulakshmiNo ratings yet
- Image Processing Using PythonDocument2 pagesImage Processing Using Pythonabhay4meggiNo ratings yet
- Minggu 2. Whole Process ChartDocument48 pagesMinggu 2. Whole Process ChartDerisNo ratings yet
- Master The Boards USMLE Step 2 CKDocument2 pagesMaster The Boards USMLE Step 2 CKMuhammad ShakeelNo ratings yet
- Canada Bay Introduces One-Vehicle PolicyDocument2 pagesCanada Bay Introduces One-Vehicle Policyscri_bequeNo ratings yet
- Watermelon BoxDocument5 pagesWatermelon BoxHary Prawira DharmaNo ratings yet
- Mtech SyllabusDocument55 pagesMtech SyllabusNithya MohanNo ratings yet
- Centre For Research: Dr.V.Murugesan DirectorDocument2 pagesCentre For Research: Dr.V.Murugesan Directornellai kumarNo ratings yet
- Lic Housing Finance LTD.: Corporate Office, MumbaiDocument3 pagesLic Housing Finance LTD.: Corporate Office, MumbaiShah FaheemNo ratings yet
- PDF Ile Aiye in Brazil and The Reinvention of Africa 1St Edition Niyi Afolabi Auth Ebook Full ChapterDocument44 pagesPDF Ile Aiye in Brazil and The Reinvention of Africa 1St Edition Niyi Afolabi Auth Ebook Full Chaptererma.church233100% (2)
- Emfss ProspectDocument96 pagesEmfss ProspectTanmay SinghNo ratings yet
- HP Openview Operations 7.5 For Windows Software: Data SheetDocument8 pagesHP Openview Operations 7.5 For Windows Software: Data Sheetlakbabi1035No ratings yet
- Duet W10255469B PDFDocument1 pageDuet W10255469B PDFJuan MedinaNo ratings yet
- Blade Shape Optimization of The Savonius Wind Turbine Using A GeneticDocument10 pagesBlade Shape Optimization of The Savonius Wind Turbine Using A GeneticMedy SitorusNo ratings yet
- Montesquieu's Theory of Separation of PowerDocument3 pagesMontesquieu's Theory of Separation of PowerHira KabirNo ratings yet
- Lg938L Wheel Loader Parts Catalog: Shandong Lingong Construction Machinery Co.,LtdDocument396 pagesLg938L Wheel Loader Parts Catalog: Shandong Lingong Construction Machinery Co.,LtdВладиславМасарскийNo ratings yet
- Boarding Pass 2f858Document1 pageBoarding Pass 2f858Bob AndreiNo ratings yet
- Clash VmessDocument2 pagesClash VmessReplay GamingNo ratings yet
- MT6739 Android ScatterDocument14 pagesMT6739 Android Scatterاسامه ايوبNo ratings yet
- Programming With Python: by MustaphaDocument99 pagesProgramming With Python: by MustaphaMustaphaNo ratings yet
- Test Papers For FICODocument4 pagesTest Papers For FICOManohar G ShankarNo ratings yet
- Handy Purge 100 Weld Purge Monitor PDFDocument1 pageHandy Purge 100 Weld Purge Monitor PDFnishant361No ratings yet
- Consumer Behavior and Electronic CommerceDocument33 pagesConsumer Behavior and Electronic Commerceasma246No ratings yet


























































































You might also like
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0From EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Rating: 5 out of 5 stars5/5 (1)
- WI - Intermediate Check BalanceDocument2 pagesWI - Intermediate Check Balancechinhon83% (6)
- Computer Assisted Part ProgrammingDocument21 pagesComputer Assisted Part ProgrammingSanthan SalaiNo ratings yet
- Robot Specifications - Robot ProgrammingDocument54 pagesRobot Specifications - Robot ProgrammingPriyanshu NainNo ratings yet
- BullseyeDocument4 pagesBullseyeRuben CuevasNo ratings yet
- Scope:: Last and First Name: Student IdDocument4 pagesScope:: Last and First Name: Student Idb7663664No ratings yet
- Autocad Lab ManualDocument24 pagesAutocad Lab Manualmadhu.ammu112No ratings yet
- NC, CNC & Robotics PDFDocument100 pagesNC, CNC & Robotics PDFSiddhrajsinh ZalaNo ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- NC and CNC MachinesDocument25 pagesNC and CNC MachinesSabiha Hajdarbegović-HafizovićNo ratings yet
- Project Construction: 3.1 HC-05 Bluetooth To Serial Port ModuleDocument8 pagesProject Construction: 3.1 HC-05 Bluetooth To Serial Port Moduleanugya sharmaNo ratings yet
- Heidenhain TNC BasicDocument175 pagesHeidenhain TNC BasicReymondo Bundoc100% (2)
- Unit - III CNC Part ProgrammingDocument39 pagesUnit - III CNC Part ProgrammingNarayana PerumalNo ratings yet
- Computer Assisted Part Programming (APT, Automatically Programmed Tool)Document40 pagesComputer Assisted Part Programming (APT, Automatically Programmed Tool)kumareshNo ratings yet
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Document13 pagesMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoNo ratings yet
- Robotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot ProgrammingDocument30 pagesRobotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot Programmingmksamy2021No ratings yet
- Numerical ControlDocument36 pagesNumerical ControlsaishvNo ratings yet
- Introduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)Document20 pagesIntroduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)thanh_cdt01No ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot CoursesAmla SingNo ratings yet
- Design of A Full Adder Using PTL and GDI TechniqueDocument6 pagesDesign of A Full Adder Using PTL and GDI TechniqueIJARTETNo ratings yet
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsDocument5 pagesA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanNo ratings yet
- UNIT II System SoftwareDocument11 pagesUNIT II System SoftwareArulmozhi ManoharanNo ratings yet
- CH 8 Industrial RoboticsDocument39 pagesCH 8 Industrial RoboticsDeepak PathakNo ratings yet
- Welcome !!! METE 284 P3-C1Document20 pagesWelcome !!! METE 284 P3-C1Shane Michael BacalsoNo ratings yet
- Computer Aided Part ProgrammingDocument19 pagesComputer Aided Part ProgrammingPiyush Aggarwal100% (4)
- AutoCad Basic Commands PDFDocument34 pagesAutoCad Basic Commands PDFspacejuyNo ratings yet
- Apt PDFDocument45 pagesApt PDFJignesh Rohit0% (1)
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument51 pagesWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraNo ratings yet
- CNC Project FullDocument22 pagesCNC Project FullDebabrata NandaNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- A Line Follower Robot-ICCAE 2010Document6 pagesA Line Follower Robot-ICCAE 2010Ioan DorofteiNo ratings yet
- Omron Cp1e PDFDocument45 pagesOmron Cp1e PDFSuzaini SupingatNo ratings yet
- TNC 430 HeidenhainDocument362 pagesTNC 430 HeidenhainCao ThanhNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemHoomi ShbNo ratings yet
- Harshit Robotics 10Document13 pagesHarshit Robotics 10harshitkargathara21No ratings yet
- Laboratory Manual CamDocument22 pagesLaboratory Manual CamSahil TanweerNo ratings yet
- NC CNC DNC FMS TheoryDocument21 pagesNC CNC DNC FMS Theorykamleshyadavmoney100% (1)
- XrotorDocument21 pagesXrotorFrancesco ReaNo ratings yet
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pages3 Waukesha Gas Engine Maintenance ManualMamunNo ratings yet
- CNC Basic & Prog.Document89 pagesCNC Basic & Prog.Christine BrownNo ratings yet
- Robotics Model QuestionsDocument3 pagesRobotics Model QuestionsAnjan Kumar KantepalliNo ratings yet
- Ch-11 NC CNC DNC FMS Automation and RoboticsDocument143 pagesCh-11 NC CNC DNC FMS Automation and RoboticsshafiqNo ratings yet
- Design Implementation and Control of A H PDFDocument11 pagesDesign Implementation and Control of A H PDFNikhil HasabiNo ratings yet
- Computer Aided Manufacturing (EME031)Document4 pagesComputer Aided Manufacturing (EME031)Hemant PalNo ratings yet
- RoboticsDocument26 pagesRoboticsmkmnawaz972No ratings yet
- An Instruction Set For The Efficient Implementation of The Cordic AlgorithmDocument4 pagesAn Instruction Set For The Efficient Implementation of The Cordic AlgorithmNaveen JainNo ratings yet
- 254464.1 Car Mikac VezaDocument6 pages254464.1 Car Mikac VezaengrodeNo ratings yet
- What Are The Storage Devices in CAD?Document23 pagesWhat Are The Storage Devices in CAD?shunmugeshNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- NCERT Class 6 Political ScienceDocument80 pagesNCERT Class 6 Political ScienceNITIN KUMAR SHARMANo ratings yet
- Engineering Mechanics Question and Answers For GATE IAS PDFDocument37 pagesEngineering Mechanics Question and Answers For GATE IAS PDFshiv kr dubey100% (1)
- IES 2011 Cut Off Marks Engineering Service Cutoff MarksDocument1 pageIES 2011 Cut Off Marks Engineering Service Cutoff MarksKBSMANITNo ratings yet
- Thermodynamics P K Nag Exercise Unsolved Problems SolvedDocument265 pagesThermodynamics P K Nag Exercise Unsolved Problems SolvedRavinder Antil90% (40)
- Oath & Code of Ethics of A PharmacistDocument9 pagesOath & Code of Ethics of A PharmacistROSE ANN C. CHICONo ratings yet
- Ofcom Site Blocking Report With Redactions RemovedDocument56 pagesOfcom Site Blocking Report With Redactions RemovedTJ McIntyreNo ratings yet
- Waste Management PlanDocument37 pagesWaste Management PlankimgNo ratings yet
- Software Testing ConceptsDocument10 pagesSoftware Testing ConceptsHarivelan GnanavelNo ratings yet
- SsssDocument1 pageSssssooraj kumarNo ratings yet
- Partnership Accounting PDFDocument4 pagesPartnership Accounting PDFPamela BugarsoNo ratings yet
- Sat. Com (R20) Unit-3Document11 pagesSat. Com (R20) Unit-3kavuri indulakshmiNo ratings yet
- Image Processing Using PythonDocument2 pagesImage Processing Using Pythonabhay4meggiNo ratings yet
- Minggu 2. Whole Process ChartDocument48 pagesMinggu 2. Whole Process ChartDerisNo ratings yet
- Master The Boards USMLE Step 2 CKDocument2 pagesMaster The Boards USMLE Step 2 CKMuhammad ShakeelNo ratings yet
- Canada Bay Introduces One-Vehicle PolicyDocument2 pagesCanada Bay Introduces One-Vehicle Policyscri_bequeNo ratings yet
- Watermelon BoxDocument5 pagesWatermelon BoxHary Prawira DharmaNo ratings yet
- Mtech SyllabusDocument55 pagesMtech SyllabusNithya MohanNo ratings yet
- Centre For Research: Dr.V.Murugesan DirectorDocument2 pagesCentre For Research: Dr.V.Murugesan Directornellai kumarNo ratings yet
- Lic Housing Finance LTD.: Corporate Office, MumbaiDocument3 pagesLic Housing Finance LTD.: Corporate Office, MumbaiShah FaheemNo ratings yet
- PDF Ile Aiye in Brazil and The Reinvention of Africa 1St Edition Niyi Afolabi Auth Ebook Full ChapterDocument44 pagesPDF Ile Aiye in Brazil and The Reinvention of Africa 1St Edition Niyi Afolabi Auth Ebook Full Chaptererma.church233100% (2)
- Emfss ProspectDocument96 pagesEmfss ProspectTanmay SinghNo ratings yet
- HP Openview Operations 7.5 For Windows Software: Data SheetDocument8 pagesHP Openview Operations 7.5 For Windows Software: Data Sheetlakbabi1035No ratings yet
- Duet W10255469B PDFDocument1 pageDuet W10255469B PDFJuan MedinaNo ratings yet
- Blade Shape Optimization of The Savonius Wind Turbine Using A GeneticDocument10 pagesBlade Shape Optimization of The Savonius Wind Turbine Using A GeneticMedy SitorusNo ratings yet
- Montesquieu's Theory of Separation of PowerDocument3 pagesMontesquieu's Theory of Separation of PowerHira KabirNo ratings yet
- Lg938L Wheel Loader Parts Catalog: Shandong Lingong Construction Machinery Co.,LtdDocument396 pagesLg938L Wheel Loader Parts Catalog: Shandong Lingong Construction Machinery Co.,LtdВладиславМасарскийNo ratings yet
- Boarding Pass 2f858Document1 pageBoarding Pass 2f858Bob AndreiNo ratings yet
- Clash VmessDocument2 pagesClash VmessReplay GamingNo ratings yet
- MT6739 Android ScatterDocument14 pagesMT6739 Android Scatterاسامه ايوبNo ratings yet
- Programming With Python: by MustaphaDocument99 pagesProgramming With Python: by MustaphaMustaphaNo ratings yet
- Test Papers For FICODocument4 pagesTest Papers For FICOManohar G ShankarNo ratings yet
- Handy Purge 100 Weld Purge Monitor PDFDocument1 pageHandy Purge 100 Weld Purge Monitor PDFnishant361No ratings yet
- Consumer Behavior and Electronic CommerceDocument33 pagesConsumer Behavior and Electronic Commerceasma246No ratings yet