You might also like
- Mini Project Report (CLAP SWITCH)Document22 pagesMini Project Report (CLAP SWITCH)Om Prakash Singh100% (4)
- Design of A Non-Ideal Buck ConverterDocument13 pagesDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- As 3007.2 - Electrical InstallationsDocument43 pagesAs 3007.2 - Electrical Installationsduckman2009No ratings yet
- Lm5032 Interleaved Boost Converter: D1 L1 Vin VoutDocument12 pagesLm5032 Interleaved Boost Converter: D1 L1 Vin VoutParvesh GautamNo ratings yet
- Design Battery ChargerDocument20 pagesDesign Battery Chargeranand_girgaonkar100% (1)
- An 4134Document14 pagesAn 4134shri.bhairavkar6977No ratings yet
- Design of 22-32 To 15 V Buck ConverterDocument7 pagesDesign of 22-32 To 15 V Buck ConverterAnuar Alfredo Gonzalez SolarNo ratings yet
- Universal Block DiagramDocument6 pagesUniversal Block Diagramapneetsandhu1234No ratings yet
- RESEARCH of Communications Research No. 2Document19 pagesRESEARCH of Communications Research No. 2Princess EsmejardaNo ratings yet
- Section F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationDocument8 pagesSection F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationKiệt NgôNo ratings yet
- Synchronous Inverse SEPIC Topology Provides High Efficiency For Noninverting Buck/Boost Voltage ConvertersDocument5 pagesSynchronous Inverse SEPIC Topology Provides High Efficiency For Noninverting Buck/Boost Voltage ConvertersLeonardo OrtizNo ratings yet
- BB DEsign 1Document7 pagesBB DEsign 1nandhakumarmeNo ratings yet
- Designing A Boost-Switching Regulator With The MCP1650Document0 pagesDesigning A Boost-Switching Regulator With The MCP1650Asad MalikNo ratings yet
- Maths OperationDocument27 pagesMaths OperationTurkish GatxyNo ratings yet
- Buck Boost ReportDocument10 pagesBuck Boost ReportKarThiNo ratings yet
- 6 Log Anti Log AmplifiersDocument32 pages6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- Snubber Circuit Design CalculatorsDocument3 pagesSnubber Circuit Design CalculatorsteomondoNo ratings yet
- Chapter-1 Objective: 1.1 Objective of The ProjectDocument23 pagesChapter-1 Objective: 1.1 Objective of The ProjectPrashanth CooldudeNo ratings yet
- Analysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsDocument6 pagesAnalysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsxynthianNo ratings yet
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDocument13 pagesDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luNo ratings yet
- CUK ConverterDocument4 pagesCUK Converterranjitheee1292No ratings yet
- Ulta Stepup DC To DC Conveter With Reduced Switch StressDocument21 pagesUlta Stepup DC To DC Conveter With Reduced Switch StressDRISHYANo ratings yet
- Lica Unit-1 Notes (3-1 ECE)Document52 pagesLica Unit-1 Notes (3-1 ECE)vasantha_btech90% (20)
- Public A CaoDocument23 pagesPublic A CaoShaheer DurraniNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesSwitch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipGhulam AbbasNo ratings yet
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- Prekidačka NapajanjaDocument48 pagesPrekidačka NapajanjaDamir PranjkovicNo ratings yet
- Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocument69 pagesImproved Power Quality AC-DC Converters With High Frequency Transformer IsolationZlatian RaduNo ratings yet
- Using Activ BufferDocument7 pagesUsing Activ Bufferranjith120198No ratings yet
- Funcionamiento Del 5Q1265RF en La FuenteDocument19 pagesFuncionamiento Del 5Q1265RF en La FuenteJorge Corrales100% (1)
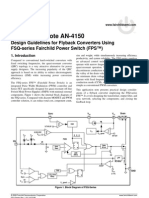
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- BCS Electronics-I Sem 1 2019 Paper AnswersDocument22 pagesBCS Electronics-I Sem 1 2019 Paper AnswersKomal RathodNo ratings yet
- Analog To Digital Converter and Vise VersDocument7 pagesAnalog To Digital Converter and Vise VersSpyx MeniNo ratings yet
- Of Loop AC: Design Feedback in Unity Power Factor To DC ConverterDocument9 pagesOf Loop AC: Design Feedback in Unity Power Factor To DC ConverterEjaz AhmedNo ratings yet
- Daycounter Inc - Snubber Circuit Design CalculatorsDocument5 pagesDaycounter Inc - Snubber Circuit Design CalculatorsLaercio Marques100% (1)
- Bien AP XungDocument11 pagesBien AP XungVan Thanh TranNo ratings yet
- Switched-Capaci T 6 - D C Converter Inrush Current and LowDocument7 pagesSwitched-Capaci T 6 - D C Converter Inrush Current and LowHamid BoualiNo ratings yet
- Fly BackDocument20 pagesFly BackĐặng Văn TàiNo ratings yet
- Cuk For Power Factor CorrectionDocument4 pagesCuk For Power Factor CorrectionRichard MadandaNo ratings yet
- Principles Applications ICL7660Document10 pagesPrinciples Applications ICL7660Juan F. RamosNo ratings yet
- An 4140Document11 pagesAn 4140ommidbeNo ratings yet
- Optimizing The Load Transient Response of The Buck ConverterDocument7 pagesOptimizing The Load Transient Response of The Buck ConverterNéstor BernalNo ratings yet
- DC-DC Converters PDFDocument7 pagesDC-DC Converters PDFRidaNo ratings yet
- Implementing The TL431 Feedback LoopDocument10 pagesImplementing The TL431 Feedback LoopAnand KumarNo ratings yet
- Assignment2 NewdocxDocument3 pagesAssignment2 NewdocxAstinSohnNo ratings yet
- An 4140Document11 pagesAn 4140Anonymous j7toV6z7PNo ratings yet
- Lab 09 DacDocument8 pagesLab 09 DacSenthil KumarNo ratings yet
- AN738 Design of A Small, Efficient, Isolated Flyback Converter For 24-V Input Systems With Si9121Document9 pagesAN738 Design of A Small, Efficient, Isolated Flyback Converter For 24-V Input Systems With Si9121Swati DevNo ratings yet
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocument8 pagesAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNo ratings yet
- Battery Eliminator CircuitDocument5 pagesBattery Eliminator CircuitGiriNo ratings yet
- An 0022Document16 pagesAn 0022helveciotfNo ratings yet
- 95-Wat Laptop PSU 12V in - 19V 5A Out PDFDocument7 pages95-Wat Laptop PSU 12V in - 19V 5A Out PDFArina ScăunașuNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- d11246 PDFDocument383 pagesd11246 PDFMayeth MacedaNo ratings yet
- Theological Implications of The Simulation ArgumentDocument16 pagesTheological Implications of The Simulation ArgumentMayeth MacedaNo ratings yet
- Computing in A Parallel UniverseDocument6 pagesComputing in A Parallel UniverseMayeth MacedaNo ratings yet
- Coronavirus-Report-1 30 2020 PDFDocument81 pagesCoronavirus-Report-1 30 2020 PDFpivap333No ratings yet
- Tropical Cyclones: A Preparedness GuideDocument12 pagesTropical Cyclones: A Preparedness GuideMayeth MacedaNo ratings yet
- UniverseCreationComputer PDFDocument44 pagesUniverseCreationComputer PDFMayeth MacedaNo ratings yet
- Handbook of African Swine Fever in Wild BoarDocument111 pagesHandbook of African Swine Fever in Wild BoarMayeth MacedaNo ratings yet
- Segway - The Human TransporterDocument5 pagesSegway - The Human TransporterMayeth MacedaNo ratings yet
- Carbon 05 00003 v2 PDFDocument31 pagesCarbon 05 00003 v2 PDFMayeth MacedaNo ratings yet
- Ce81 PDFDocument8 pagesCe81 PDFMayeth MacedaNo ratings yet
- Sadoff Experimentation Education Policy OxREP 2014 PDFDocument24 pagesSadoff Experimentation Education Policy OxREP 2014 PDFMayeth MacedaNo ratings yet
- The South China Sea DisputeDocument26 pagesThe South China Sea DisputeMayeth MacedaNo ratings yet
- Communities at The Centre - A Global Aids Update 2019Document316 pagesCommunities at The Centre - A Global Aids Update 2019Mayeth MacedaNo ratings yet
- The South China Sea DisputeDocument26 pagesThe South China Sea DisputeMayeth MacedaNo ratings yet
- Hubble Space Telescope's Top Science FindingsDocument4 pagesHubble Space Telescope's Top Science FindingsMayeth MacedaNo ratings yet
- MPMC Overall Question BankDocument5 pagesMPMC Overall Question BankLAKSHMINo ratings yet
- BFR91Document5 pagesBFR91norgenNo ratings yet
- CI Series Multi-Function Counter / Timer User Manual: FeaturesDocument12 pagesCI Series Multi-Function Counter / Timer User Manual: FeaturesXavier Jesus0% (1)
- LM 19Document14 pagesLM 19hindukusc80No ratings yet
- Hafler Xl-600 Amp ManDocument12 pagesHafler Xl-600 Amp Mandebelideki2811No ratings yet
- 9a02304-Basic Electrical & Electronics EngineeringDocument4 pages9a02304-Basic Electrical & Electronics Engineeringsivabharathamurthy0% (1)
- 24c04 PDFDocument22 pages24c04 PDFDHANAPRAKAASHNo ratings yet
- ElecDocument40 pagesElecakela_life100% (4)
- Lee 2006Document6 pagesLee 2006rahma rahmaNo ratings yet
- Ic Lab RecDocument55 pagesIc Lab RecBinu GeorgeNo ratings yet
- Electrical Conductivity Measurement of Fibers & YarnsDocument8 pagesElectrical Conductivity Measurement of Fibers & YarnsAhmad SamerNo ratings yet
- PricelistDocument54 pagesPricelistErjinKimNo ratings yet
- Silicone FluidsDocument27 pagesSilicone FluidsdvarsastryNo ratings yet
- Layout ExerciseDocument20 pagesLayout ExerciseMasud SarkerNo ratings yet
- Technical Manual For Float Cum Boost Battery Charger (S1A02)Document8 pagesTechnical Manual For Float Cum Boost Battery Charger (S1A02)DEEPAKNo ratings yet
- Big Bass Drive 1.2 PDFDocument4 pagesBig Bass Drive 1.2 PDFPedro Henrique HenriqueNo ratings yet
- NTC Tips-on-Maths-MethodsDocument111 pagesNTC Tips-on-Maths-MethodsFESTUS COBENA AINOONo ratings yet
- Pradhi IITB Placement ExperienceDocument10 pagesPradhi IITB Placement ExperienceTaha PerwaizNo ratings yet
- Max 6675Document8 pagesMax 6675Jeremy WoodsNo ratings yet
- Power Management Devices TexasDocument121 pagesPower Management Devices TexasSaurabh AnmadwarNo ratings yet
- FPGA DS 02056 4 1 MachXO2 Family Data SheetDocument119 pagesFPGA DS 02056 4 1 MachXO2 Family Data Sheetjoaica5046No ratings yet
- Alesis MATICA 500/900 (A4/A8) Service ManualDocument22 pagesAlesis MATICA 500/900 (A4/A8) Service ManualFazar AhmadNo ratings yet
- HIVECTOL CatalogDocument6 pagesHIVECTOL Catalogprathap394No ratings yet
- MQP Electronics Physics Pep TalkDocument5 pagesMQP Electronics Physics Pep TalkGundu RekhaNo ratings yet
- LT24 User Manual Vo04Document24 pagesLT24 User Manual Vo04Lạc DươngNo ratings yet
- Fa5500ap FujiDocument26 pagesFa5500ap FujiAlooomNo ratings yet
- Bosch DS GCU3 1 EN RZDocument2 pagesBosch DS GCU3 1 EN RZInwards CenteredNo ratings yet