You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Sorrentino: Mosby's Textbook For Nursing Assistants, 9th EditionDocument10 pagesSorrentino: Mosby's Textbook For Nursing Assistants, 9th EditionMariam33% (6)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Coa Memo 88-569 Guidelines For AppraisalDocument14 pagesCoa Memo 88-569 Guidelines For Appraisalrubydelacruz100% (7)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- By Michael Hailu Advisor: Bahran Asrat (PHD)Document88 pagesBy Michael Hailu Advisor: Bahran Asrat (PHD)Micheale HailuNo ratings yet
- OFC Assignment QuestionsDocument9 pagesOFC Assignment QuestionsPrashant SangulagiNo ratings yet
- Fog Paper PrashantDocument6 pagesFog Paper PrashantPrashant SangulagiNo ratings yet
- First International Conference On Recent Innovations in Engineering and Technology-2016Document7 pagesFirst International Conference On Recent Innovations in Engineering and Technology-2016Prashant SangulagiNo ratings yet
- Introduction ... 01 2. What Is Cloud Computing? ....................................................................... 02 3. Types of Clouds ..03Document5 pagesIntroduction ... 01 2. What Is Cloud Computing? ....................................................................... 02 3. Types of Clouds ..03Prashant SangulagiNo ratings yet
- Cascade Approach of DWT-SVD Digital Image WatermarkingDocument5 pagesCascade Approach of DWT-SVD Digital Image WatermarkingPrashant SangulagiNo ratings yet
- DSP Viva QuestionsDocument2 pagesDSP Viva QuestionsPrashant Sangulagi0% (1)
- The Load Monitoring and Protection On Electricity Power Lines Using GSM NetworkDocument6 pagesThe Load Monitoring and Protection On Electricity Power Lines Using GSM NetworkPrashant Sangulagi100% (1)
- Kinetic Evaluation of Ethyl Acetate Production For Local Alimentary Solvents ProductionDocument7 pagesKinetic Evaluation of Ethyl Acetate Production For Local Alimentary Solvents ProductionDiego Nicolas ManceraNo ratings yet
- Netbiter Concept Brochure - WebDocument7 pagesNetbiter Concept Brochure - WebVidian Prakasa AriantoNo ratings yet
- Generator Type Eco 3-1Sn/4: Electrical CharacteristicsDocument5 pagesGenerator Type Eco 3-1Sn/4: Electrical CharacteristicsFaridh AmroullohNo ratings yet
- Cr976a - Westlake TyreDocument1 pageCr976a - Westlake TyreLuis Eduardo PuertoNo ratings yet
- Midterm QM MATERIALSDocument28 pagesMidterm QM MATERIALSTrần Thanh TrúcNo ratings yet
- OpenDSS Circuit Interface PDFDocument6 pagesOpenDSS Circuit Interface PDFLucas GodoiNo ratings yet
- The Scientific Contributions of Paul D. Maclean (1913-2007) : John D. Newman, PHD, and James C. Harris, MDDocument3 pagesThe Scientific Contributions of Paul D. Maclean (1913-2007) : John D. Newman, PHD, and James C. Harris, MDJosé C. Maguiña. Neurociencias.No ratings yet
- Compatibility of ENTP With INFP in Relationships TruityDocument1 pageCompatibility of ENTP With INFP in Relationships TruityJill WuNo ratings yet
- Revised Iesco Book of Financial PowersDocument75 pagesRevised Iesco Book of Financial PowersMuhammad IbrarNo ratings yet
- DIFFERENT TYPE OF DRAWING Based On MediaDocument23 pagesDIFFERENT TYPE OF DRAWING Based On MediaLeslyn Bangibang DiazNo ratings yet
- Aits-2021-Open Test-Jeea-Paper-2Document13 pagesAits-2021-Open Test-Jeea-Paper-2Ayush SrivastavNo ratings yet
- Ground Attack - Special EditionDocument32 pagesGround Attack - Special EditionElisa Mardones100% (1)
- Choroid Plexus CystsDocument2 pagesChoroid Plexus Cystsvalerius83No ratings yet
- Notes On Static and Dynamic FrictionDocument2 pagesNotes On Static and Dynamic FrictiondrhillNo ratings yet
- STRAIGHT LINES (Cet)Document11 pagesSTRAIGHT LINES (Cet)Pratheek KeshavNo ratings yet
- CA3162Document8 pagesCA3162marcelo riveraNo ratings yet
- Theorems On Triangle Inequalities and Parallel Lines Cut by A TransversalDocument2 pagesTheorems On Triangle Inequalities and Parallel Lines Cut by A Transversal20100576No ratings yet
- Grade-5-International Kangaroo Mathematics Contest-Benjamin Level-PkDocument9 pagesGrade-5-International Kangaroo Mathematics Contest-Benjamin Level-PkLaiba ManzoorNo ratings yet
- DC 211261Document3 pagesDC 211261debu beraNo ratings yet
- FL WrightDocument20 pagesFL Wrightarpitvyas67100% (1)
- Partnering With Indonesia For 40 YearsDocument8 pagesPartnering With Indonesia For 40 YearsasfsndNo ratings yet
- WAV252 Quick Reference Guide in English Part 2Document2 pagesWAV252 Quick Reference Guide in English Part 2JACKNo ratings yet
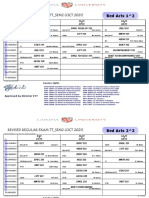
- Revised Regular Exam TT - Sem2 (Oct 2021) : Bed Arts 1 2Document78 pagesRevised Regular Exam TT - Sem2 (Oct 2021) : Bed Arts 1 2kelvinNo ratings yet
- The Seven Deadly SinsDocument47 pagesThe Seven Deadly SinsSilva TNo ratings yet
- BurnerDocument2 pagesBurnerVishnu PatidarNo ratings yet
- Progress Report #1: CO-OP Training in YASREFDocument9 pagesProgress Report #1: CO-OP Training in YASREFMuhammed ajmalNo ratings yet
- Overhaul InfoDocument1 pageOverhaul Infomohamed hamedNo ratings yet