You might also like
- VIC + Compteur DAFDocument106 pagesVIC + Compteur DAFmaxime le sann100% (2)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsRating: 5 out of 5 stars5/5 (1)
- Manual Sly InjectionDocument80 pagesManual Sly Injectiondmantsio100% (2)
- Dual Full-Bridge Driver: DescriptionDocument100 pagesDual Full-Bridge Driver: DescriptionFunashima CostaNo ratings yet
- L298 H BridgeDocument13 pagesL298 H BridgeLe Trong SangNo ratings yet
- Datasheetl 293 DDocument9 pagesDatasheetl 293 Dcristian torresNo ratings yet
- TB6674FAG ToshibaDocument18 pagesTB6674FAG ToshibalucianassisNo ratings yet
- H-Bridge Driver Push-Pull Four Channel/Dual: Pin ConnectionDocument6 pagesH-Bridge Driver Push-Pull Four Channel/Dual: Pin ConnectionromicaNo ratings yet
- LM311 IC Data SheetDocument10 pagesLM311 IC Data SheetcallkalaiNo ratings yet
- Low Power Dual Voltage Comparators: DescriptionDocument11 pagesLow Power Dual Voltage Comparators: DescriptionAlexsander MeloNo ratings yet
- Tap Position TransducerDocument1 pageTap Position Transducerjunnior23No ratings yet
- LM393Document4 pagesLM393maher mlbaseNo ratings yet
- Tca 785 DatasheetDocument18 pagesTca 785 DatasheetCarlos SilvaNo ratings yet
- HCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsDocument9 pagesHCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsEngin UzunNo ratings yet
- Feature: CONCEPT Repair Data BaseDocument4 pagesFeature: CONCEPT Repair Data BaseRaul Trujillo PNo ratings yet
- Power Supply Battery Charger Regulation Control Circuit: Semiconductor Technical DataDocument20 pagesPower Supply Battery Charger Regulation Control Circuit: Semiconductor Technical DataKarim MuhammedNo ratings yet
- Low Power Quad Voltage Comparator: DescriptionDocument10 pagesLow Power Quad Voltage Comparator: DescriptionJesus Almanzar SantosNo ratings yet
- Datasheet Tca 785Document16 pagesDatasheet Tca 785ronaldotecnicoNo ratings yet
- L289 BDocument12 pagesL289 BYanina YaninaNo ratings yet
- HCF4026B: Decade Counter/Divider With Decoded 7-Segment Display Output and Display EnableDocument11 pagesHCF4026B: Decade Counter/Divider With Decoded 7-Segment Display Output and Display EnableLuis GrugerNo ratings yet
- VU Meter A Led, KA2284Document3 pagesVU Meter A Led, KA2284hamed sazegaranNo ratings yet
- TD 310Document9 pagesTD 310Paresh PanchalNo ratings yet
- RunnTech P9000 Proportional AmplifierDocument3 pagesRunnTech P9000 Proportional AmplifierRunnTechNo ratings yet
- BSP742R Cat 938H 1651286Document17 pagesBSP742R Cat 938H 1651286Leandro SilvaNo ratings yet
- LTC1771 DemomanualDocument8 pagesLTC1771 Demomanualmekki1No ratings yet
- 2A Switching Regulator: 1 FeaturesDocument22 pages2A Switching Regulator: 1 FeaturesManuelAlejandroVicuñaRojasNo ratings yet
- GS324-Low Power QUAD Operational AmplifiersDocument9 pagesGS324-Low Power QUAD Operational AmplifiersFlaviano Costa SilvaNo ratings yet
- Power Amplifier For Driving A Deflection Circuit of A Color TelevisionDocument5 pagesPower Amplifier For Driving A Deflection Circuit of A Color TelevisionShamol KormokerNo ratings yet
- 2703 PDFDocument6 pages2703 PDFRadu PaulNo ratings yet
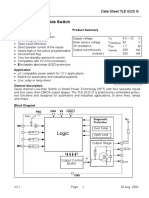
- Smart Power High-Side-Switch: Features Product SummaryDocument16 pagesSmart Power High-Side-Switch: Features Product SummaryMarquinho SilvaNo ratings yet
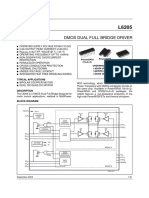
- Dmos Dual Full Bridge Driver: Multipower BCD TechnologyDocument11 pagesDmos Dual Full Bridge Driver: Multipower BCD TechnologyChristian BiancoNo ratings yet
- Dual Operational Amplifiers: Product Description FeaturesDocument9 pagesDual Operational Amplifiers: Product Description FeaturesMendez VeronicaNo ratings yet
- Multifunction Very Low Drop Voltage Regulator: DescriptionDocument10 pagesMultifunction Very Low Drop Voltage Regulator: DescriptionErasmo FrancoNo ratings yet
- Regulador 4949ed PDFDocument11 pagesRegulador 4949ed PDFluizNo ratings yet
- TLE6225GPDocument10 pagesTLE6225GPNoelNo ratings yet
- Infineon Bts6133d Ds v01 00 enDocument17 pagesInfineon Bts6133d Ds v01 00 enmarino246No ratings yet
- Smart Power High-Side-Switch: BSP 762 TDocument16 pagesSmart Power High-Side-Switch: BSP 762 TAlejandro ArangurenNo ratings yet
- Wide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351Document10 pagesWide Bandwidth Single J-Fet Operational Amplifier: LF151 LF251 - LF351romanbun1No ratings yet
- Utc 2822 DDocument5 pagesUtc 2822 DVinícius MottaNo ratings yet
- LM 1815Document6 pagesLM 1815Abbode HoraniNo ratings yet
- LM1801Document10 pagesLM1801sbgayenNo ratings yet
- Smart Power High-Side-Switch: Product Summary FeaturesDocument18 pagesSmart Power High-Side-Switch: Product Summary FeaturesbelchiorNo ratings yet
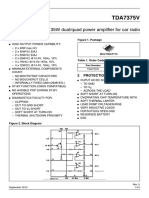
- Tda 7375 VDocument15 pagesTda 7375 Viyc09096No ratings yet
- 2 X 35W Dual/quad Power Amplifier For Car Radio: TDA7375VDocument15 pages2 X 35W Dual/quad Power Amplifier For Car Radio: TDA7375VAnonymous ZmRV6WqNo ratings yet
- ZXCDocument9 pagesZXCArda AkberkNo ratings yet
- DatasheetDocument14 pagesDatasheetTeyfik koyuncuNo ratings yet
- TLE6225GDocument9 pagesTLE6225GNoelNo ratings yet
- 74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerDocument8 pages74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerCyro PereiraNo ratings yet
- KA2131 SamsungDocument4 pagesKA2131 SamsungTito PerezNo ratings yet
- l6205 Driver MotorDocument21 pagesl6205 Driver MotorLeon MartinezNo ratings yet
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- GS RXF 00E E Ed1Document20 pagesGS RXF 00E E Ed1Sani PoulouNo ratings yet
- STK433 290 eDocument13 pagesSTK433 290 eAnonymous r68sPjNo ratings yet
- 1HS01G PDFDocument18 pages1HS01G PDFAldo TonatoNo ratings yet
- Guia Aplicaciones Eazycool BOM 303 - 453 C060106 - 0313 - 0513 - E - AGL - OCU - ZX - FULL - 0Document35 pagesGuia Aplicaciones Eazycool BOM 303 - 453 C060106 - 0313 - 0513 - E - AGL - OCU - ZX - FULL - 0Oscar PerezNo ratings yet
- Motion Control SolutionsDocument19 pagesMotion Control SolutionskurtulmamisNo ratings yet
- Rutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFDocument11 pagesRutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFajc2_1984100% (1)
- ATS 3 Suorces ControlledDocument6 pagesATS 3 Suorces Controlledحسام جمالNo ratings yet
- Service Manual For Toshiba - Equium l300 Satego l300 Satellite l300 l305 Pro l300 Pslb0123Document252 pagesService Manual For Toshiba - Equium l300 Satego l300 Satellite l300 l305 Pro l300 Pslb0123William AcevedoNo ratings yet
- This Training Is Intended For Maintenance PersonnelDocument124 pagesThis Training Is Intended For Maintenance PersonnelVinci Valcu ParneNo ratings yet
- AMCO 1013 Electric Welding MachineDocument2 pagesAMCO 1013 Electric Welding MachineOwais MalikNo ratings yet
- Tension Control SystemsDocument2 pagesTension Control SystemsSheik HassanNo ratings yet
- Cougar XT Compact Rev4Document6 pagesCougar XT Compact Rev4Alfonso RamosNo ratings yet
- QHD 6kg-ServiceDocument37 pagesQHD 6kg-ServiceLaboratórioNo ratings yet
- Yamaha A-S701 PDFDocument77 pagesYamaha A-S701 PDFcharan100% (1)
- SANYO VCC-6584 (336746) - User ManualDocument2 pagesSANYO VCC-6584 (336746) - User ManualSteven RichardsNo ratings yet
- Service Manual PDFDocument210 pagesService Manual PDFAprajita KayasthaNo ratings yet
- Catalog Extract - EduTrainer - enDocument31 pagesCatalog Extract - EduTrainer - enzhangzhaoleiNo ratings yet
- BFT Libra C MaDocument10 pagesBFT Libra C MamcilNo ratings yet
- Xscribe 5: Service ManualDocument68 pagesXscribe 5: Service ManualHerclas SanchezNo ratings yet
- Image System CD100 Technical Man - Code 50 80 004Document129 pagesImage System CD100 Technical Man - Code 50 80 004Anthony RichardNo ratings yet
- TA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyDocument18 pagesTA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyvetchboyNo ratings yet
- Electrical Calculator: - I2 SeriesDocument46 pagesElectrical Calculator: - I2 SeriessyahabdulrizalNo ratings yet
- AEQ TLE-02D Users ManualDocument32 pagesAEQ TLE-02D Users ManualJose Carlos SoaresNo ratings yet
- List of IEC Standards Wikipedia, The FRDocument5 pagesList of IEC Standards Wikipedia, The FRSrikant RanjanNo ratings yet
- Instructions and Warnings English: Control Board 24V For Gate Automation OperatingDocument11 pagesInstructions and Warnings English: Control Board 24V For Gate Automation OperatingNuno AlmeidaNo ratings yet
- BVP130 Led160-4s 740 Psu Ofa52Document3 pagesBVP130 Led160-4s 740 Psu Ofa52diegoNo ratings yet
- Cabinet Types and Their InstallationDocument119 pagesCabinet Types and Their InstallationnamhutechNo ratings yet
- VSDDocument36 pagesVSDFaisal JamilNo ratings yet