You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ID Task Name Duration Start FinishDocument3 pagesID Task Name Duration Start Finishu12003761No ratings yet
- NASA Handrail Clamp Assembly Challenge - GrabCAD PDFDocument9 pagesNASA Handrail Clamp Assembly Challenge - GrabCAD PDFu12003761No ratings yet
- Monday - Chest and TricepsDocument2 pagesMonday - Chest and Tricepsu12003761No ratings yet
- Results GROUP 26 05 - 03 - 2014Document56 pagesResults GROUP 26 05 - 03 - 2014u12003761No ratings yet
- Assignment 6 - 18 AprilDocument1 pageAssignment 6 - 18 Aprilu12003761No ratings yet
- Time TableDocument1 pageTime Tableu12003761No ratings yet
- Web Application Penetration TestingDocument11 pagesWeb Application Penetration TestingRohitNo ratings yet
- Consumer Surplus:: at K Chabveka Economics NotesDocument28 pagesConsumer Surplus:: at K Chabveka Economics NotesShawn DzingayiNo ratings yet
- 2007 Paper - Water Injection Effects On Compressor Stage OperationDocument30 pages2007 Paper - Water Injection Effects On Compressor Stage OperationBassam ElsayedNo ratings yet
- Dh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraDocument3 pagesDh-Ipc-Hdw8341X-3D-S2: 3Mp Wizmind Dual-Lens Network CameraSteve CheaNo ratings yet
- Binomial Poisson Normal DistributionDocument9 pagesBinomial Poisson Normal DistributionFahim MahmudNo ratings yet
- How To Upload Excel File Into Internal Table With Required FormatDocument2 pagesHow To Upload Excel File Into Internal Table With Required FormatErick ViteNo ratings yet
- LatheDocument74 pagesLatheChandrakantha K100% (1)
- An Ecient Uniform-Cost Normalized Edit Distance AlgorithmDocument12 pagesAn Ecient Uniform-Cost Normalized Edit Distance Algorithmanon-75650No ratings yet
- Ball BearingsDocument31 pagesBall Bearingsnike_y2kNo ratings yet
- Kitar FosforusDocument4 pagesKitar FosforusMohd Hakimi MD Setapa100% (1)
- Chapter6b-Combinational Logic Design PracticesDocument38 pagesChapter6b-Combinational Logic Design PracticesZulkarnineNo ratings yet
- Experiment 08-A2dDocument3 pagesExperiment 08-A2dapi-277396867No ratings yet
- Model 793.00 System SoftwareDocument750 pagesModel 793.00 System SoftwareMichel Zarzosa RojasNo ratings yet
- Recent Developments On The Interpretation of Dissolved Gas Analysis in TransformersDocument33 pagesRecent Developments On The Interpretation of Dissolved Gas Analysis in TransformersputrasejahtraNo ratings yet
- Dead and Live LoadDocument5 pagesDead and Live LoadBhuwesh PantNo ratings yet
- Hana Table PartitioningDocument12 pagesHana Table PartitioningGowri Prasanth Chaduvula0% (1)
- 19 - K.van Helden - Towards Iso 17089-1Document58 pages19 - K.van Helden - Towards Iso 17089-1Bar AvaitNo ratings yet
- NOJA 520 05 SCADA Interface Description PDFDocument24 pagesNOJA 520 05 SCADA Interface Description PDFsergio torrez vargasNo ratings yet
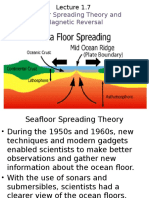
- Seafloor Spreading TheoryDocument16 pagesSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- Shape and Volume: A Presentation On AcousticsDocument35 pagesShape and Volume: A Presentation On AcousticsSiddharth BhandariNo ratings yet
- Sony SDM-N50R PDFDocument76 pagesSony SDM-N50R PDFFöldi BélaNo ratings yet
- Chapter 1 - Distillation PDFDocument107 pagesChapter 1 - Distillation PDFFatin Natasha NazriNo ratings yet
- Module 5 Grade 10 FinalDocument9 pagesModule 5 Grade 10 FinalSandy CarbonillaNo ratings yet
- Speech Enhancement Using Minimum Mean-Square Error Short-Time Spectral Amplitude EstimatorDocument13 pagesSpeech Enhancement Using Minimum Mean-Square Error Short-Time Spectral Amplitude EstimatorwittyofficerNo ratings yet
- PDF 4.6 MDocument2 pagesPDF 4.6 MmdisicNo ratings yet
- CN101A Timer ManualDocument2 pagesCN101A Timer ManualMauricioVilalvaJr.0% (1)
- Carbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEDocument53 pagesCarbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEsaintEmNo ratings yet
- 3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Document16 pages3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Pkay TandohNo ratings yet
- ABB MNS IAC Additional Test ReportDocument14 pagesABB MNS IAC Additional Test ReportSheik100% (1)
- August 19-23 Lesson PlanDocument1 pageAugust 19-23 Lesson Planapi-282162606No ratings yet