You might also like
- Synchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetDocument4 pagesSynchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetGthulasi78No ratings yet
- Six Step BLDC Motor ControlDocument5 pagesSix Step BLDC Motor Controlgthulasi787126No ratings yet
- SensorlessBLDCControl 2 PDFDocument5 pagesSensorlessBLDCControl 2 PDFgthulasi787126No ratings yet
- Sensorless BLDC Motor Control With BEMF Zero-Crossing DetectionDocument6 pagesSensorless BLDC Motor Control With BEMF Zero-Crossing DetectionGthulasi78No ratings yet
- 10 A 8 DDDocument7 pages10 A 8 DDElectromateNo ratings yet
- Review 3Document24 pagesReview 3Anthony BeltranNo ratings yet
- DC To AC Inverter With DSCDocument23 pagesDC To AC Inverter With DSCUsamah FarooquiNo ratings yet
- SFCDocument16 pagesSFCKelvin Liew100% (1)
- Manufacturer's Declaration of Conformity: Reliance Electric Company, Inc. 24800 Tungsten Rd. Cleveland, Ohio 44117 - USADocument3 pagesManufacturer's Declaration of Conformity: Reliance Electric Company, Inc. 24800 Tungsten Rd. Cleveland, Ohio 44117 - USADejen HaileslassieNo ratings yet
- Analog Servo Drive: Description Power RangeDocument13 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- 2SA2040/2SC5707: Bipolar TransistorDocument10 pages2SA2040/2SC5707: Bipolar Transistorblueword66No ratings yet
- Assun Motor Catalogue-2020Document137 pagesAssun Motor Catalogue-2020MiguelNo ratings yet
- QS5 Servo Driver Manual PDFDocument88 pagesQS5 Servo Driver Manual PDFValentin ValoNo ratings yet
- Ba6956an, Ba6287f, Ba6285fs, Ba6285afp Y, Ba6920fp yDocument18 pagesBa6956an, Ba6287f, Ba6285fs, Ba6285afp Y, Ba6920fp yproctepNo ratings yet
- PFC-PWM CM6800/01/02/24 and CM6900/01/02 Design Algorithms Also, For Single PFC, CM6500 and CM6501, Please Use The Equations For CM6800/01/02Document5 pagesPFC-PWM CM6800/01/02/24 and CM6900/01/02 Design Algorithms Also, For Single PFC, CM6500 and CM6501, Please Use The Equations For CM6800/01/02Đào Ngọc HoàngNo ratings yet
- Amc B25a20ac SpecsheetDocument9 pagesAmc B25a20ac SpecsheetElectromateNo ratings yet
- Advanced Motion Controls S16a8Document8 pagesAdvanced Motion Controls S16a8ElectromateNo ratings yet
- D9259Document10 pagesD9259calinsatNo ratings yet
- Advanced Motion Controls 25A20DDDocument8 pagesAdvanced Motion Controls 25A20DDServo2GoNo ratings yet
- TP Ftf2008 Motorctrl Part4Document102 pagesTP Ftf2008 Motorctrl Part4Percy MancNo ratings yet
- Analog Servo Drive: Description Power RangeDocument11 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- FPGA Based Digital Control Technique For BLDC Motor Drive: 978-1-5386-7703-2/18/$31.00 ©2018 IEEEDocument5 pagesFPGA Based Digital Control Technique For BLDC Motor Drive: 978-1-5386-7703-2/18/$31.00 ©2018 IEEEVidhya M PNo ratings yet
- N.capability Curve (Ani.) MPPGCLDocument17 pagesN.capability Curve (Ani.) MPPGCLvikasoza100% (1)
- AMC Datasheet BX25A20ACDocument9 pagesAMC Datasheet BX25A20ACsaberleffi1No ratings yet
- Amp STAC5 DatasheetDocument7 pagesAmp STAC5 DatasheetElectromateNo ratings yet
- Motortronics Training - 2012Document95 pagesMotortronics Training - 2012daly2daly100% (1)
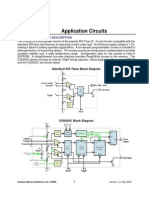
- Description: Demo Manual Dc1562B Ltc699X-X Timerblox: Oscillators, One Shots, PWM, Delay, Power On ResetDocument14 pagesDescription: Demo Manual Dc1562B Ltc699X-X Timerblox: Oscillators, One Shots, PWM, Delay, Power On Resetthachsanh86No ratings yet
- CSS555CDocument20 pagesCSS555CprofjhzNo ratings yet
- Advanced Motion Controls S100a20Document8 pagesAdvanced Motion Controls S100a20ElectromateNo ratings yet
- Half-Bridge MOSFET Driver DocDocument7 pagesHalf-Bridge MOSFET Driver DocEric Lenin Marin MoncadaNo ratings yet
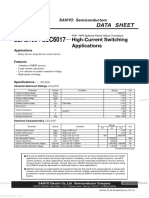
- 2SA2169 / 2SC6017: High-Current Switching ApplicationsDocument5 pages2SA2169 / 2SC6017: High-Current Switching ApplicationsbambamtdoyNo ratings yet
- Data SheetDocument24 pagesData Sheetleandrosacon1No ratings yet
- Motor Controllers CMMB-AS, For Servo Motors TOC Bookmark Motor Controllers CMMB-AS, For Servo MotorsDocument8 pagesMotor Controllers CMMB-AS, For Servo Motors TOC Bookmark Motor Controllers CMMB-AS, For Servo MotorsOtavio CarvalhoNo ratings yet
- Features: 5V/3.3V 2.5Gbps VARIABLE Output Swing Pecl/Ecl Differential ReceiverDocument0 pagesFeatures: 5V/3.3V 2.5Gbps VARIABLE Output Swing Pecl/Ecl Differential Receiverckean_ngNo ratings yet
- An-8201 FCM8201 Three-Phase Sine-Wave BLDC Motor ControllerDocument25 pagesAn-8201 FCM8201 Three-Phase Sine-Wave BLDC Motor ControllerFelipePerezNo ratings yet
- Advanced Motion Controls Dpeaniu-C060a400Document11 pagesAdvanced Motion Controls Dpeaniu-C060a400ElectromateNo ratings yet
- Advanced Motion Controls Dpeaniu-C100a400Document11 pagesAdvanced Motion Controls Dpeaniu-C100a400ElectromateNo ratings yet
- Analog Servo Drive: Description Power RangeDocument7 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Seminar On Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocument69 pagesSeminar On Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationKiran SirajNo ratings yet
- Gen 12MW PDFDocument11 pagesGen 12MW PDFTesta Bonaventura Vincenzo100% (1)
- DRV 8811Document22 pagesDRV 8811nelson_loboNo ratings yet
- AKM53X-ACCNC-00: AC Synchronous Servo MotorDocument2 pagesAKM53X-ACCNC-00: AC Synchronous Servo MotorRicardo DêgeloNo ratings yet
- STM Green Model SMPS Solution For High Power SLIM AdaptorDocument35 pagesSTM Green Model SMPS Solution For High Power SLIM Adaptorsontuyet82No ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Power Electronics Drive CircuitDocument26 pagesPower Electronics Drive CircuitSafnas KariapperNo ratings yet
- 32Document3 pages32Tárcio AndréNo ratings yet
- Machine Training PM Synchronous Ansoft MaxwellDocument111 pagesMachine Training PM Synchronous Ansoft Maxwellmashinbaz1100% (3)
- Analog Servo Drive: Description Power RangeDocument7 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Model Number Structure: Enclosed SwitchDocument9 pagesModel Number Structure: Enclosed SwitchMuhamad PriyatnaNo ratings yet
- AKM44X-ACCNC-00: AC Synchronous Servo MotorDocument2 pagesAKM44X-ACCNC-00: AC Synchronous Servo MotorRicardo DêgeloNo ratings yet
- E Tended Environment: Analog Servo DriveDocument8 pagesE Tended Environment: Analog Servo DriveElectromateNo ratings yet
- Mot-Ec - enDocument8 pagesMot-Ec - enYERKO ANDRÉS GONZÁLEZNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Machine Training PM Synchronous Ansoft MaxwellDocument111 pagesMachine Training PM Synchronous Ansoft MaxwellLatisha CarterNo ratings yet
- HS-2420RH - Fast Sample and HolDocument8 pagesHS-2420RH - Fast Sample and HolDeepa DevarajNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Displacement Current & Maxwell's EquationsDocument4 pagesDisplacement Current & Maxwell's Equationsgthulasi787126No ratings yet
- Electromagnetics 2Document5 pagesElectromagnetics 2gthulasi787126No ratings yet
- Maxwell's Equations (SI Units) Differential Form: Density of ChargesDocument7 pagesMaxwell's Equations (SI Units) Differential Form: Density of Chargesgthulasi787126No ratings yet
- Electromagnetics 3Document5 pagesElectromagnetics 3gthulasi787126No ratings yet
- 2.5 Field Of A Sheet Of Charge: Adding the effects of all the strips; dy' ρDocument5 pages2.5 Field Of A Sheet Of Charge: Adding the effects of all the strips; dy' ρgthulasi787126No ratings yet
- Hybrid Car Technology and Emergency Procedures: Presented by Oxford Fire-EMSDocument5 pagesHybrid Car Technology and Emergency Procedures: Presented by Oxford Fire-EMSgthulasi787126No ratings yet
- Electromagnetics 1 PDFDocument4 pagesElectromagnetics 1 PDFgthulasi787126No ratings yet
- Maxwell - Equations 2Document6 pagesMaxwell - Equations 2gthulasi787126No ratings yet
- 01maxwells Equations1Document4 pages01maxwells Equations1gthulasi787126No ratings yet
- Maxwell's Equations (SI Units) Differential Form: Density of ChargesDocument3 pagesMaxwell's Equations (SI Units) Differential Form: Density of Chargesgthulasi787126No ratings yet
- Maxwell - Equations 1Document5 pagesMaxwell - Equations 1gthulasi787126No ratings yet
- Differential Operators: A A A A X y ZDocument3 pagesDifferential Operators: A A A A X y Zgthulasi787126No ratings yet
- 01maxwells Equations5Document5 pages01maxwells Equations5gthulasi787126No ratings yet
- EM fields and units guideDocument3 pagesEM fields and units guidegthulasi787126No ratings yet
- Maxwell - Equations 1Document5 pagesMaxwell - Equations 1gthulasi787126No ratings yet
- Engine Sealing, Gaskets, and Fastener Torque: © 2012 Delmar, Cengage LearningDocument5 pagesEngine Sealing, Gaskets, and Fastener Torque: © 2012 Delmar, Cengage Learninggthulasi787126No ratings yet
- Maxwell's Equations (SI Units) Differential Form: Density of ChargesDocument7 pagesMaxwell's Equations (SI Units) Differential Form: Density of Chargesgthulasi787126No ratings yet
- Maxwell - Equations 2Document6 pagesMaxwell - Equations 2gthulasi787126No ratings yet
- As Is Independent of Path, It Does Not Matter Which Path C From (A, B) To (X, Y) Is Used To Evaluate F (X, Y)Document5 pagesAs Is Independent of Path, It Does Not Matter Which Path C From (A, B) To (X, Y) Is Used To Evaluate F (X, Y)gthulasi787126No ratings yet
- Displacement Current & Maxwell's EquationsDocument4 pagesDisplacement Current & Maxwell's Equationsgthulasi787126No ratings yet
- Choose Any Point (X, Y) in The Disk With X X.: Conservative Vector FieldDocument4 pagesChoose Any Point (X, Y) in The Disk With X X.: Conservative Vector Fieldgthulasi787126No ratings yet
- Vector Fields Independent of Path are ConservativeDocument4 pagesVector Fields Independent of Path are Conservativegthulasi787126No ratings yet
- Conversely, If It Is True That Whenever C Is A Closed Path in D, Then We Demonstrate Independence of Path As FollowsDocument6 pagesConversely, If It Is True That Whenever C Is A Closed Path in D, Then We Demonstrate Independence of Path As Followsgthulasi787126No ratings yet
- Vector Fields & Conservative FieldsDocument5 pagesVector Fields & Conservative Fieldsgthulasi787126No ratings yet
- Most Computer Algebra Systems (CAS) Have Commands That Compute The Curl and Divergence of Vector FieldsDocument5 pagesMost Computer Algebra Systems (CAS) Have Commands That Compute The Curl and Divergence of Vector Fieldsgthulasi787126No ratings yet
- With This Terminology, We Can Say That:: Line Integrals of Conservative Vector Fields Are Independent of PathDocument6 pagesWith This Terminology, We Can Say That:: Line Integrals of Conservative Vector Fields Are Independent of Pathgthulasi787126No ratings yet
- We Assume That D Is Open - Which Means That, For Every Point P in D, There Is A Disk With Center P That Lies Entirely in DDocument4 pagesWe Assume That D Is Open - Which Means That, For Every Point P in D, There Is A Disk With Center P That Lies Entirely in Dgthulasi787126No ratings yet
- F I J K: X y Z P Q R R Q P R Q P y Z Z X X yDocument6 pagesF I J K: X y Z P Q R R Q P R Q P y Z Z X X ygthulasi787126No ratings yet
- Lithium Ion (Li-Ion) Batteries: Prof. R. Shanthini 09 Feb 2013Document5 pagesLithium Ion (Li-Ion) Batteries: Prof. R. Shanthini 09 Feb 2013gthulasi787126No ratings yet
- Vector CalculusDocument6 pagesVector Calculusgthulasi787126No ratings yet