You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solution - Bejan.Convection Heat Transfer - Third Edition PDFDocument280 pagesSolution - Bejan.Convection Heat Transfer - Third Edition PDFHugo Leonardo Leao91% (11)
- Module 2. Concepts, Theories and Principles of Physical/ Earth Science B. EnergyDocument2 pagesModule 2. Concepts, Theories and Principles of Physical/ Earth Science B. EnergyJherrie Mae MattaNo ratings yet
- 3 PhaseDocument76 pages3 PhaseastridyoungtheoNo ratings yet
- Determination of Material Removal Rate in Electro Discharge Machining Through Copper ElectrodeDocument7 pagesDetermination of Material Removal Rate in Electro Discharge Machining Through Copper ElectrodeIJRASETPublicationsNo ratings yet
- Torque Wrench Calibration ProcedureDocument2 pagesTorque Wrench Calibration ProcedureAjit K GNo ratings yet
- De ZG514 - Fracture MechanicsDocument13 pagesDe ZG514 - Fracture MechanicsLokesh PrakashNo ratings yet
- The 100 Greatest Lies in Physics by Ray Fleming PDFDocument235 pagesThe 100 Greatest Lies in Physics by Ray Fleming PDFAbir Ghosh100% (2)
- Instruction Writing Magnetic Testing For Single Vee Butt WeldDocument5 pagesInstruction Writing Magnetic Testing For Single Vee Butt WeldVu PhamNo ratings yet
- Lecture 11 - Interference and Pulse TestingDocument24 pagesLecture 11 - Interference and Pulse TestingSyarifah Nurul HudaNo ratings yet
- Cleanroom PresentationDocument30 pagesCleanroom Presentationjonh366No ratings yet
- Steady Heat ConductionDocument25 pagesSteady Heat ConductionMohd Azhari Mohd RodziNo ratings yet
- Reheating and Preheating After Inflation: An IntroductionDocument9 pagesReheating and Preheating After Inflation: An IntroductionSourav GopeNo ratings yet
- Saroj Paper PDFDocument9 pagesSaroj Paper PDFkrishnaNo ratings yet
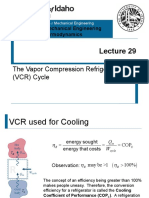
- L29 - Vapor Compression RefrigerationDocument14 pagesL29 - Vapor Compression RefrigerationAnonymous 5HYsyrddpNo ratings yet
- Engineering Mechanics: Dynamics: (3rd Edition)Document2 pagesEngineering Mechanics: Dynamics: (3rd Edition)george guerraNo ratings yet
- Cone Penetration of Lubricating Grease Using One-Quarter and One-Half Scale Cone EquipmentDocument8 pagesCone Penetration of Lubricating Grease Using One-Quarter and One-Half Scale Cone EquipmentAhmedNo ratings yet
- Alyssa Choi Tic Tac ToeDocument10 pagesAlyssa Choi Tic Tac ToeWord ExeonNo ratings yet
- HDP Serie Installation Operation and Maintenance ManualDocument68 pagesHDP Serie Installation Operation and Maintenance ManualMar CrucisNo ratings yet
- Iso 8573-4 (2001)Document8 pagesIso 8573-4 (2001)francoisjbrNo ratings yet
- Coaching ManualDocument104 pagesCoaching ManuallyanglarhaltzNo ratings yet
- Suitability of Gypsum and Crushed Waste Brick Mix For Stabilization of Weak Subgrade SoilDocument7 pagesSuitability of Gypsum and Crushed Waste Brick Mix For Stabilization of Weak Subgrade SoilBasha FayissaNo ratings yet
- IEO English Sample Paper 2 For Class 11 With SolutionsDocument27 pagesIEO English Sample Paper 2 For Class 11 With SolutionsmenekyakiaNo ratings yet
- Wave Transmission in CrystalsDocument11 pagesWave Transmission in CrystalsRichard Simon KisituNo ratings yet
- Physical Quantities and System of Units: Physics Lesson 1Document4 pagesPhysical Quantities and System of Units: Physics Lesson 1Douglas Kufre-Abasi GilbertNo ratings yet
- 1590 EC2249 SignedDocument5 pages1590 EC2249 SignedDeepak HoleNo ratings yet
- Quiz 5 Ultrasound QuestionsDocument6 pagesQuiz 5 Ultrasound Questionsmalaz husseinNo ratings yet
- AKG Bearings - SRTBDocument2 pagesAKG Bearings - SRTBWahyu HadiNo ratings yet
- Pages: 3: Answer Any Two Full QuestionsDocument3 pagesPages: 3: Answer Any Two Full Questionslakshmi dileepNo ratings yet
- Drag ForcesDocument10 pagesDrag ForcesFahadNo ratings yet
- Fans Static Head Calculation SheetDocument1 pageFans Static Head Calculation SheetraifaisalNo ratings yet