You might also like
- Domenico and Schwartz - Physical and Chemical Hydrogeology Text ExcerptsDocument42 pagesDomenico and Schwartz - Physical and Chemical Hydrogeology Text Excerptsgeo_uno100% (1)
- Drexel: Geosynthetic InstituteDocument7 pagesDrexel: Geosynthetic Institutegeo_unoNo ratings yet
- PMI-RMP Risk Managemente Professional PDFDocument22 pagesPMI-RMP Risk Managemente Professional PDFfelip108No ratings yet
- Coordinates and TraverseDocument39 pagesCoordinates and Traversegeo_uno100% (1)
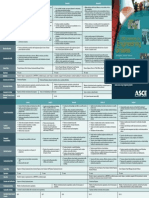
- ASCE Engineering Grades BrochureDocument2 pagesASCE Engineering Grades Brochuregeo_unoNo ratings yet
- Drexel: Geosynthetic InstituteDocument7 pagesDrexel: Geosynthetic Institutegeo_unoNo ratings yet
- How To Write An Arduino Application For The Adrc Shield 0.2 1Document18 pagesHow To Write An Arduino Application For The Adrc Shield 0.2 1magravcombrNo ratings yet
- Ladder Logic For PIC and AVRDocument9 pagesLadder Logic For PIC and AVRCarlos Cesar MaiaNo ratings yet
- USB ThermometerDocument40 pagesUSB ThermometerTheodøros D' SpectrøømNo ratings yet
- DSPACE Procedure With MPPT ExampleDocument21 pagesDSPACE Procedure With MPPT ExampleSri SriNo ratings yet
- Arduino LAB 2 Serial CommunicationDocument12 pagesArduino LAB 2 Serial CommunicationanakayamNo ratings yet
- F2833x Analogue Digital Converter: V V V D VDocument28 pagesF2833x Analogue Digital Converter: V V V D VSaiNo ratings yet
- This Following BMS Interview Questions and Answer Purely Focused On Testing and Commissioning EngineerDocument16 pagesThis Following BMS Interview Questions and Answer Purely Focused On Testing and Commissioning Engineerjahangir samiNo ratings yet
- Lab-AR-2-Jueves 24Document11 pagesLab-AR-2-Jueves 24Syd BarrettNo ratings yet
- 2013 Arduino PID Lab 0Document7 pages2013 Arduino PID Lab 0Uma MageshwariNo ratings yet
- Arduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFDocument73 pagesArduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFpermasa100% (1)
- 1.2 Parts of A DAQ SystemDocument37 pages1.2 Parts of A DAQ SystemMaddipati SumanthNo ratings yet
- MQ-135 Gas Sensor Module - ENDocument24 pagesMQ-135 Gas Sensor Module - ENSanti Martín100% (1)
- Introduction to ArduinoDocument9 pagesIntroduction to Arduinoahmad jamelNo ratings yet
- SSA 1 — ”Concepting” - Arduino Voltage Control for a Peristaltic PumpDocument3 pagesSSA 1 — ”Concepting” - Arduino Voltage Control for a Peristaltic PumpemomNo ratings yet
- A Simple Digital Thermometer: ContentDocument13 pagesA Simple Digital Thermometer: ContentKumar SamvatNo ratings yet
- GROUP4Document59 pagesGROUP4Ian Harvey Mendoza100% (1)
- LDmicro - Manual InglesDocument17 pagesLDmicro - Manual InglesMoacyr_Jr0% (1)
- LabVIEW Basics Vol1Document273 pagesLabVIEW Basics Vol1samson41879No ratings yet
- Microprocessors and Microcontrollers DesignDocument8 pagesMicroprocessors and Microcontrollers DesignBittu VermaNo ratings yet
- M4 Micro OneNoteDocument6 pagesM4 Micro OneNoteAryan RaiNo ratings yet
- Mcus How Do They WorkDocument21 pagesMcus How Do They WorkhoudaNo ratings yet
- PLC Unit 2-1 PDFDocument44 pagesPLC Unit 2-1 PDFMahesh ShendeNo ratings yet
- Advantages of Labview Over Embedded System in Home AutomationsDocument4 pagesAdvantages of Labview Over Embedded System in Home AutomationsmikotorifkyNo ratings yet
- Ladder Logic For PIC and AVRDocument6 pagesLadder Logic For PIC and AVRTomás Totaro100% (1)
- Embedded Software Architecture: EECS 461, Fall 2007 J. A. Cook J. S. FreudenbergDocument14 pagesEmbedded Software Architecture: EECS 461, Fall 2007 J. A. Cook J. S. Freudenbergpkt123No ratings yet
- How To Automate Measurements With PythonDocument8 pagesHow To Automate Measurements With PythonJoe Muller100% (1)
- University Automoma of Queretaro Engineering Faculty: Digital System 2Document15 pagesUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- Unit 3Document10 pagesUnit 3H. ShekharNo ratings yet
- Lab 3e LCD Alarm Clock Page 3e.1Document5 pagesLab 3e LCD Alarm Clock Page 3e.1iky77No ratings yet
- Frequently Asked Questions - AVRDocument18 pagesFrequently Asked Questions - AVRSagar Gupta100% (2)
- Gauge Programming FundamentalsDocument13 pagesGauge Programming FundamentalsMarius MullerNo ratings yet
- Lab1 - Seven Segment DisplayDocument9 pagesLab1 - Seven Segment DisplayJaime BarraganNo ratings yet
- Getting Started: Creating A Simple OPC Client Support ApplicationDocument25 pagesGetting Started: Creating A Simple OPC Client Support ApplicationAnonymous tW1zTL2ltNo ratings yet
- Atmega TutorialDocument18 pagesAtmega Tutorialsaran2012No ratings yet
- Arduino Handouts and ReviewerDocument8 pagesArduino Handouts and ReviewerEliane DadoNo ratings yet
- Monitoring Process Variables Through Digital TelemetryDocument17 pagesMonitoring Process Variables Through Digital TelemetryPäblïthö VäldëzNo ratings yet
- PC Based Oscilloscope Using ArduinoDocument18 pagesPC Based Oscilloscope Using ArduinoATMAKURI S V N ANJANEYA SESHASAINo ratings yet
- Introduction To Microprocessor-Based ControlDocument42 pagesIntroduction To Microprocessor-Based ControlAhdan FawwazNo ratings yet
- I O Port Detailed StructureDocument7 pagesI O Port Detailed StructureNaveed Asif100% (1)
- Matlab Arduino PDFDocument20 pagesMatlab Arduino PDFmekanicobucaroNo ratings yet
- Journey To The Center of The Plant and Back Again - SCADA 1Document10 pagesJourney To The Center of The Plant and Back Again - SCADA 1Anonymous zdCUbW8HfNo ratings yet
- ArduinoDocument24 pagesArduinoGoutham Krish100% (1)
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 pagesSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaNo ratings yet
- Clap Switch: An Industry Oriented Main Project ReportDocument31 pagesClap Switch: An Industry Oriented Main Project Reportanon_574219456No ratings yet
- Audio VU MeterDocument3 pagesAudio VU MeterkutayNo ratings yet
- Arduino - CalibrationDocument5 pagesArduino - CalibrationJose Maria Silva PimentaNo ratings yet
- Welcome To Turbofuture!: Internet Computers Cell Phones Consumer ElectronicsDocument26 pagesWelcome To Turbofuture!: Internet Computers Cell Phones Consumer ElectronicsMoyukh MandalNo ratings yet
- Arduino Hack PLC Siemens Through Lanwifi IndustriaDocument13 pagesArduino Hack PLC Siemens Through Lanwifi IndustriaImran YasinNo ratings yet
- Atmega TutorialDocument18 pagesAtmega TutorialEssel Jojo FlintNo ratings yet
- Introduction to Arduino IDE - code Arduino projectsDocument4 pagesIntroduction to Arduino IDE - code Arduino projectsRupankar MandalNo ratings yet
- 4 - 1 Arduino Basic Functions - 1Document7 pages4 - 1 Arduino Basic Functions - 1ankita81123singhNo ratings yet
- Embed SensorDocument20 pagesEmbed SensorBelinda LeeNo ratings yet
- Arduino Manual v7Document21 pagesArduino Manual v7Isar Andrei100% (6)
- Lab 3: Basic C Signals and Sockets; ICMP/PING, and TracerouteDocument7 pagesLab 3: Basic C Signals and Sockets; ICMP/PING, and TracerouteInf EtherealNo ratings yet
- Lab 14Document6 pagesLab 14diegogachet1618No ratings yet
- Thuc Hanh LabDocument7 pagesThuc Hanh LabDuy Đức TrầnNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- 2016-National Transit DatabaseDocument59 pages2016-National Transit Databasegeo_unoNo ratings yet
- Graphic Land Slide Chart-VarnesDocument1 pageGraphic Land Slide Chart-Varnesgeo_unoNo ratings yet
- Secondary Creek in Soft SoilsDocument9 pagesSecondary Creek in Soft Soilsgeo_unoNo ratings yet
- How To Learn FasterDocument25 pagesHow To Learn Fastersajid_saiyad100% (6)
- TM 5-852-6 Arctic and Subacrctic Construction Calc Methods For Depths of Freeze-Thaw Soils PDFDocument62 pagesTM 5-852-6 Arctic and Subacrctic Construction Calc Methods For Depths of Freeze-Thaw Soils PDFsean_dibartolo3668No ratings yet
- Zero Discharge PDFDocument7 pagesZero Discharge PDFgeo_uno100% (1)
- United States December 2016 - November 2017Document12 pagesUnited States December 2016 - November 2017geo_unoNo ratings yet
- NATM Design ConstructionDocument110 pagesNATM Design Constructiongeo_uno100% (1)
- Vedanta KesariDocument56 pagesVedanta Kesarigeo_unoNo ratings yet
- Cementation Skanska Energy Piles Data SheetDocument2 pagesCementation Skanska Energy Piles Data Sheetgeo_unoNo ratings yet
- Prayon Process Optimizes Phosphoric Acid ProductionDocument20 pagesPrayon Process Optimizes Phosphoric Acid Productiongeo_unoNo ratings yet
- Building Collapse Due To Shallow Trench ExcavationDocument7 pagesBuilding Collapse Due To Shallow Trench Excavationgeo_unoNo ratings yet
- Polytube Issues TipsDocument4 pagesPolytube Issues Tipsgeo_unoNo ratings yet
- Appendix B Geotechnical 201304241854130499Document91 pagesAppendix B Geotechnical 201304241854130499geo_unoNo ratings yet
- 05 Coordinates and Traverse PDFDocument39 pages05 Coordinates and Traverse PDFgeo_unoNo ratings yet
- Back of EnvelopeDocument5 pagesBack of Envelopegeo_unoNo ratings yet
- Designing Purely Decentralized Controllers To Stabilize Non-Minimum-Phase Double Integrator Networks With General Sensing TopologiesDocument6 pagesDesigning Purely Decentralized Controllers To Stabilize Non-Minimum-Phase Double Integrator Networks With General Sensing Topologiesgeo_unoNo ratings yet
- An Empirical Evaluation of Interval Estimation For Markov Decision ProcessesDocument8 pagesAn Empirical Evaluation of Interval Estimation For Markov Decision Processesgeo_unoNo ratings yet
- Snap 2Document77 pagesSnap 2simone stanoNo ratings yet
- CPT Analyst Manual 4Document57 pagesCPT Analyst Manual 4geo_unoNo ratings yet
- Test Methods, Test Properties and Testing Frequency For High Density Polyethylene (HDPE) Smooth and Textured GeomembranesDocument11 pagesTest Methods, Test Properties and Testing Frequency For High Density Polyethylene (HDPE) Smooth and Textured Geomembranesgeo_unoNo ratings yet
- APA Diaphragms and Shear WallsDocument32 pagesAPA Diaphragms and Shear WallsagustinussetNo ratings yet