You might also like
- Lab 8 Notes - Basic Aircraft Design Rules: H V H V H H VDocument8 pagesLab 8 Notes - Basic Aircraft Design Rules: H V H V H H VRia Jiot100% (1)
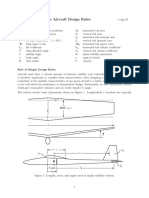
- Background On Aircraft AerodynamicsDocument8 pagesBackground On Aircraft AerodynamicsAbdelrahman NassifNo ratings yet
- Advanced UAV Aerodynamics, Flight Stability and Control: Novel Concepts, Theory and ApplicationsFrom EverandAdvanced UAV Aerodynamics, Flight Stability and Control: Novel Concepts, Theory and ApplicationsPascual MarquésRating: 5 out of 5 stars5/5 (1)
- Helicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftFrom EverandHelicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftNo ratings yet
- Low Speed Airfoil Data V3 PDFDocument445 pagesLow Speed Airfoil Data V3 PDFK11E77No ratings yet
- Preliminary Design Approach of The Wing BoxDocument3 pagesPreliminary Design Approach of The Wing BoxWhyDirgantara IDNo ratings yet
- About Winglets DesignDocument8 pagesAbout Winglets DesignAdel AliNo ratings yet
- Wing Rib Analysis Shear Center For 3 Stringer Closed CellDocument33 pagesWing Rib Analysis Shear Center For 3 Stringer Closed Cellpramodssg100% (1)
- Study of Preliminary Configuration Design of F-35 Using Simple CFDDocument13 pagesStudy of Preliminary Configuration Design of F-35 Using Simple CFDMithun Ravichandran100% (1)
- NASA - Composite StructuresDocument50 pagesNASA - Composite StructuresDragomirescu Alina100% (1)
- Aircraft Design Formula SheetDocument4 pagesAircraft Design Formula SheetAnon ymousNo ratings yet
- Wing Design ParametersDocument5 pagesWing Design ParametersMakam VenkateshNo ratings yet
- Landing Gear ConceptualDesignDocument6 pagesLanding Gear ConceptualDesignHafsa KhanNo ratings yet
- Basic Design of Flying Wing ModelsDocument32 pagesBasic Design of Flying Wing Modelst8e7w2ko100% (1)
- Proadvice 3 - Aileron SizingDocument12 pagesProadvice 3 - Aileron SizingSnorri Gudmundsson100% (1)
- How To Design and Build Your Own Airplane: Y'.' 3. Has The Best Possible Performance For The Power AvailableDocument2 pagesHow To Design and Build Your Own Airplane: Y'.' 3. Has The Best Possible Performance For The Power AvailablejustincosgroveNo ratings yet
- Airfoil Data V1Document315 pagesAirfoil Data V1drypatrick100% (1)
- Design of Wood Aircraft StructuresDocument242 pagesDesign of Wood Aircraft Structurestrang15100% (2)
- Foam RC AirplaneDocument10 pagesFoam RC Airplanemarius_danila8736No ratings yet
- Spar LocationDocument4 pagesSpar LocationParth ChopraNo ratings yet
- Efficient Light Aircraft Design - GlidingDocument43 pagesEfficient Light Aircraft Design - GlidingkearnscribdNo ratings yet
- Landing Gear LocationDocument6 pagesLanding Gear LocationJack Azad67% (3)
- Aerodynamic Analysis of A Class II High-Performance Hang GliderDocument27 pagesAerodynamic Analysis of A Class II High-Performance Hang Gliderbillnye1250No ratings yet
- Fluid-Dynamic LiftDocument507 pagesFluid-Dynamic LiftMike Corvin100% (1)
- Design and AnalysisDocument9 pagesDesign and Analysisiaset123No ratings yet
- Analysis of Composite WingDocument260 pagesAnalysis of Composite WingIr AyenNo ratings yet
- Airplane DesignDocument216 pagesAirplane DesignPHÚC Lê Mai HoàngNo ratings yet
- Analytic Wing and FuselageDocument55 pagesAnalytic Wing and FuselageJack100% (2)
- Calculation of Thrust in A Ducted Fan Assembly For HovercarftDocument14 pagesCalculation of Thrust in A Ducted Fan Assembly For HovercarftAndrew Whipple100% (2)
- Design of An Aircraft Wing Structure For Static Analysis and Fatigue LifeDocument5 pagesDesign of An Aircraft Wing Structure For Static Analysis and Fatigue Lifeankitsinghal54No ratings yet
- Aircraft Design Day6Document39 pagesAircraft Design Day6arun_sanga1233515100% (2)
- Bruhn Errata 2nd Edition Draft2Document309 pagesBruhn Errata 2nd Edition Draft2gamermax13100% (1)
- Airfoil Design MethodsDocument5 pagesAirfoil Design Methodsjagath chandraNo ratings yet
- Wing Box - Role and LayoutDocument24 pagesWing Box - Role and LayoutNguyen Van Trong100% (2)
- Morphing Aerospace Vehicles and StructuresFrom EverandMorphing Aerospace Vehicles and StructuresJohn ValasekNo ratings yet
- Aircraft Airfoil DatabaseDocument288 pagesAircraft Airfoil DatabaseSharjeel Ahmad100% (2)
- ABOTT Summary of Airfoil DataDocument266 pagesABOTT Summary of Airfoil Datapilotazprz100% (1)
- Spars and Stringers - Function and Designing PDFDocument4 pagesSpars and Stringers - Function and Designing PDFprabs20069178No ratings yet
- C. T. Sun Mechanics of Aircraft StructuresDocument192 pagesC. T. Sun Mechanics of Aircraft StructuresYogendraKumarNo ratings yet
- Aircraft Design Day3Document42 pagesAircraft Design Day3arun_sanga1233515100% (1)
- Simplified Flutter Prevention Criteria For Personal Type AircraftDocument27 pagesSimplified Flutter Prevention Criteria For Personal Type AircraftDavid Russo100% (2)
- Hinge Moment Theoretical CalculationDocument13 pagesHinge Moment Theoretical CalculationArmghan ShabirNo ratings yet
- Structural Analysis at Aircraft Conceptual Design StageDocument127 pagesStructural Analysis at Aircraft Conceptual Design StageYvessNo ratings yet
- Aircraft Stress Analysis and Structural Design Full VersionDocument20 pagesAircraft Stress Analysis and Structural Design Full VersionErhanNo ratings yet
- Pega Stol Wing Kit Wing Stress AnalysisDocument39 pagesPega Stol Wing Kit Wing Stress Analysislaerciofilho100% (1)
- Components Weight EstimatingDocument19 pagesComponents Weight Estimatingmurad_ashourNo ratings yet
- Aircraft Engine Attachment and Vibration ControlDocument8 pagesAircraft Engine Attachment and Vibration ControlSivaramanNo ratings yet
- Human Powered Aircraft ReportDocument83 pagesHuman Powered Aircraft ReportvrgohilNo ratings yet
- Analysis & Design of Composite & Metallic Flight Vehicle Structures - Abbott - 2016 - First EditionDocument154 pagesAnalysis & Design of Composite & Metallic Flight Vehicle Structures - Abbott - 2016 - First EditionRamesha AswathanarayanappaNo ratings yet
- The Glider - Stelio Frati English Version of "L'aliante"Document198 pagesThe Glider - Stelio Frati English Version of "L'aliante"Luca MicheliniNo ratings yet
- An Introduction to the Longitudinal Static Stability of Low-Speed AircraftFrom EverandAn Introduction to the Longitudinal Static Stability of Low-Speed AircraftRating: 5 out of 5 stars5/5 (1)
- Taildragger Tales: My Late-Blooming Romance with a Piper Cub and Her Younger SistersFrom EverandTaildragger Tales: My Late-Blooming Romance with a Piper Cub and Her Younger SistersRating: 2 out of 5 stars2/5 (1)
- Current Aeronautical Fatigue Problems: Proceedings of a Symposium Held in Rome, 23–25 April 1963From EverandCurrent Aeronautical Fatigue Problems: Proceedings of a Symposium Held in Rome, 23–25 April 1963No ratings yet
- Aircraft Structure Vibration.Document4 pagesAircraft Structure Vibration.Abdelrahman NassifNo ratings yet
- Aircraft Structure Vibration (Problem 11)Document6 pagesAircraft Structure Vibration (Problem 11)Abdelrahman NassifNo ratings yet
- Report Title Solution of Time Response Problem Using MATLABDocument8 pagesReport Title Solution of Time Response Problem Using MATLABAbdelrahman NassifNo ratings yet
- Vibration Analysis SDOF.Document11 pagesVibration Analysis SDOF.Abdelrahman NassifNo ratings yet