You might also like
- EECS MaglevDocument9 pagesEECS MaglevAkhil GuptaNo ratings yet
- Pid Without A PHD PDFDocument14 pagesPid Without A PHD PDFGiovanni Eliezer100% (2)
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiNo ratings yet
- Numerical Analysis Exam Review AnswersDocument7 pagesNumerical Analysis Exam Review AnswerswasifNo ratings yet
- Lec 12Document23 pagesLec 12Edu Daryl MacerenNo ratings yet
- IEPG 2019 Week 2 2-7 Modelling The Power Output of A Wind Turbine-TranscriptDocument3 pagesIEPG 2019 Week 2 2-7 Modelling The Power Output of A Wind Turbine-Transcriptsebastian nava perezNo ratings yet
- Model Reference Adaptive ControlDocument22 pagesModel Reference Adaptive Controlasusd112550% (4)
- Lec10 EsrDocument23 pagesLec10 EsrEswar ChNo ratings yet
- Control ReportDocument18 pagesControl ReportChris CroninNo ratings yet
- Pole Placement by State Feedback in DC Motor by MatlabDocument13 pagesPole Placement by State Feedback in DC Motor by MatlabJason JonesNo ratings yet
- Turbine Governor ModelingDocument28 pagesTurbine Governor ModelingGuruxyz100% (1)
- Servo MotorDocument41 pagesServo MotorVaibhav Patil100% (1)
- PID Without A PHDDocument16 pagesPID Without A PHDirfanexpertNo ratings yet
- Lec 18Document20 pagesLec 18deciohNo ratings yet
- Tm450 Acopos Control Concept and AdjustmentDocument51 pagesTm450 Acopos Control Concept and Adjustmentsatish734No ratings yet
- Equal Area Criterion Power System DynamicsDocument28 pagesEqual Area Criterion Power System Dynamicsபிரசன்னகுமார் ஆனந்தன்No ratings yet
- Servo FundamentalsDocument12 pagesServo FundamentalsMohanraj SelvakumarNo ratings yet
- Control Project ModifiedDocument4 pagesControl Project ModifiedMohamed Elsayed HasanNo ratings yet
- Space Vector PWM VSI Induction Motor DriveDocument11 pagesSpace Vector PWM VSI Induction Motor DrivesjillelamoodiNo ratings yet
- Alex Hile Experiment 5Document8 pagesAlex Hile Experiment 5Alex HileNo ratings yet
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007No ratings yet
- PID Without A PHDDocument7 pagesPID Without A PHDEEpro808No ratings yet
- Design of An Antenna Azimuth Position Control SystemDocument12 pagesDesign of An Antenna Azimuth Position Control SystemUche PaulNo ratings yet
- Ieee Modelling of Excitation SystemDocument31 pagesIeee Modelling of Excitation SystemSalih Ahmed ObeidNo ratings yet
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocument13 pagesPi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNo ratings yet
- Lec1 PDFDocument21 pagesLec1 PDFK DNo ratings yet
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDocument7 pagesLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoNo ratings yet
- Theory SERVO Linear Position ControlDocument7 pagesTheory SERVO Linear Position ControlEnMaa 96No ratings yet
- DC Servo MotorDocument10 pagesDC Servo MotorGourav KumarNo ratings yet
- Direct Torque Control of Induction Motor ThesisDocument5 pagesDirect Torque Control of Induction Motor Thesiscrystaljacksonnewhaven100% (2)
- Servo TurorialDocument38 pagesServo TurorialJamesNo ratings yet
- mv18n011990p45Document13 pagesmv18n011990p45vanphuc1182No ratings yet
- SRV02 Exp2 Speed ControlDocument11 pagesSRV02 Exp2 Speed Controlsh1999No ratings yet
- MBS Report Lab 2_Adeymi Mayowa_Saluri_MadhuriDocument10 pagesMBS Report Lab 2_Adeymi Mayowa_Saluri_Madhurimayowae6No ratings yet
- SynchrosDocument43 pagesSynchrosjashjaNo ratings yet
- Project Report Designing Position Control System: Abu Dhabi UniversityDocument13 pagesProject Report Designing Position Control System: Abu Dhabi UniversityMohammed ShifulNo ratings yet
- Servo Motor - Servo Mechanism - Theory and Working PrincipleDocument6 pagesServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghNo ratings yet
- Closedloop PID Control of Universal MotorDocument9 pagesClosedloop PID Control of Universal MotorabhywaNo ratings yet
- NI Tutorial 4604Document12 pagesNI Tutorial 4604bamanjunathaNo ratings yet
- Jurnal 4Document7 pagesJurnal 4Muhammad NafikNo ratings yet
- PID Without A PHDDocument7 pagesPID Without A PHDRamius HamdaniNo ratings yet
- DC Motor Control 2017Document43 pagesDC Motor Control 2017Rasheed ShahNo ratings yet
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocument4 pagesEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyNo ratings yet
- Figure 1 Process Under ControlDocument9 pagesFigure 1 Process Under ControlKajalNo ratings yet
- 5.CS Lab Manual R14Document80 pages5.CS Lab Manual R14Kh KhalilNo ratings yet
- NNS Notes ServomotorDocument9 pagesNNS Notes ServomotorNarendra SinhaNo ratings yet
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkDocument25 pagesCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARNo ratings yet
- Science of TuningDocument8 pagesScience of TuningeacondeNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDocument7 pagesDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNo ratings yet
- Understanding PID Control, Part 7 - Important PID ConceptsDocument5 pagesUnderstanding PID Control, Part 7 - Important PID ConceptsFirman Wahyu NugrohoNo ratings yet
- DC Motor ArduinoDocument40 pagesDC Motor ArduinoBodo De La BuernoNo ratings yet
- Engrmece3350u Lab Handbook f2014Document52 pagesEngrmece3350u Lab Handbook f2014Bob LeeNo ratings yet
- NI Tutorial 10703 enDocument7 pagesNI Tutorial 10703 enthulinh12a1No ratings yet
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- CRC Problem: 1.using Polynomial Method Write The Code Word For The Message 11100110 Given Generator Polynomial G 11001Document1 pageCRC Problem: 1.using Polynomial Method Write The Code Word For The Message 11100110 Given Generator Polynomial G 11001mailmadoNo ratings yet
- Determine What Needs To Be Improved. Improve The Rise Time. The Overshoot. The Steady-State Error. A Desired Overall ResponseDocument1 pageDetermine What Needs To Be Improved. Improve The Rise Time. The Overshoot. The Steady-State Error. A Desired Overall ResponsemailmadoNo ratings yet
- Leapfrog Filer CircuitDocument6 pagesLeapfrog Filer CircuitmailmadoNo ratings yet
- RH CriterionDocument2 pagesRH CriterionmailmadoNo ratings yet
- Feeling Good The New Mood Therapy Revised and Updated 609896Document6 pagesFeeling Good The New Mood Therapy Revised and Updated 609896mailmado0% (4)
- Data Communication - CS601 Spring 2010 Mid Term Solved McqsDocument23 pagesData Communication - CS601 Spring 2010 Mid Term Solved Mcqsmailmado100% (2)
- Signal Processing Examples Using The TMS320C67x Digital Signal Processing Library (DSPLIB)Document18 pagesSignal Processing Examples Using The TMS320C67x Digital Signal Processing Library (DSPLIB)Rogmary DominguezNo ratings yet
- Expectations Investing-Reading Stock Prices For Better ReturnsDocument35 pagesExpectations Investing-Reading Stock Prices For Better ReturnsmailmadoNo ratings yet
- 8086 Masm ProgramsDocument46 pages8086 Masm ProgramsVeera Ragavan50% (8)
- Rising Action Exposition: MoanaDocument2 pagesRising Action Exposition: MoanaElyn SabordoNo ratings yet
- Design of Composite Columns: The American Approach: Roberto T. LeonDocument18 pagesDesign of Composite Columns: The American Approach: Roberto T. LeonvardhangargNo ratings yet
- Horticulture Value Chain in Botswana & Roles of The Various Stakeholders InvolvedDocument16 pagesHorticulture Value Chain in Botswana & Roles of The Various Stakeholders Involvedkoxewon749No ratings yet
- Livro Phonics Teoria e PassosDocument257 pagesLivro Phonics Teoria e PassosLisza Pn100% (1)
- WhitePaper AVEVA UnifiedEngineering 07-19 PROOF PDFDocument12 pagesWhitePaper AVEVA UnifiedEngineering 07-19 PROOF PDFManoj Kumar Singh0% (1)
- Compressor MSW 60 Max Two Stages 175 PsigDocument2 pagesCompressor MSW 60 Max Two Stages 175 PsigJoel Leandro Ibarra CoriaNo ratings yet
- ĐỀ LUYỆN TH HỌC SINH GIỎI ĐỀ 9 10 HSDocument10 pagesĐỀ LUYỆN TH HỌC SINH GIỎI ĐỀ 9 10 HSmh3804325No ratings yet
- En Generator Spec DrawDocument9 pagesEn Generator Spec DrawNos GoteNo ratings yet
- Sikaswell s-2Document4 pagesSikaswell s-2Eko PriambudiNo ratings yet
- Assignment1 10%Document3 pagesAssignment1 10%Felicia ChinNo ratings yet
- (Sustainable Agriculture Reviews 1) Eric Lichtfouse (Auth.), Eric Lichtfouse (Eds.)-Organic Farming, Pest Control and Remediation of Soil Pollutants_ Organic Farming, Pest Control and Remediation of sDocument416 pages(Sustainable Agriculture Reviews 1) Eric Lichtfouse (Auth.), Eric Lichtfouse (Eds.)-Organic Farming, Pest Control and Remediation of Soil Pollutants_ Organic Farming, Pest Control and Remediation of sCesar Diaz Barrios100% (1)
- FLIGHTLINE® Series, Enhanced BD-5 KitsDocument1 pageFLIGHTLINE® Series, Enhanced BD-5 KitsMiguel Angel Ramirez Moreno0% (1)
- Indian Science and Technology in The Eighteenth CenturyDocument4 pagesIndian Science and Technology in The Eighteenth CenturyshabditaNo ratings yet
- Pce SopDocument2 pagesPce SopA MallikNo ratings yet
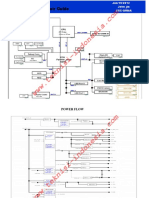
- .Asus X45a RGDocument5 pages.Asus X45a RGNgipik Komp PatiNo ratings yet
- Business World (Jan. 14, 2016)Document27 pagesBusiness World (Jan. 14, 2016)Peter RojasNo ratings yet
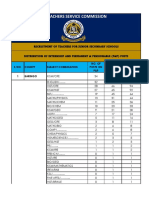
- Recruitment of Teachers For Junior Secondary Schools For Interns and Permanent and PensionableDocument38 pagesRecruitment of Teachers For Junior Secondary Schools For Interns and Permanent and PensionablePeris KamangaNo ratings yet
- MMS 101 - Course Module PDFDocument245 pagesMMS 101 - Course Module PDFalexiefrancisNo ratings yet
- Paper On Solar Cell FibresDocument9 pagesPaper On Solar Cell FibresRajkumarNo ratings yet
- Trắc nghiệm ĐTA2Document52 pagesTrắc nghiệm ĐTA2Kiệt TrầnNo ratings yet
- Topclean S CPC 30 Ti235cenDocument32 pagesTopclean S CPC 30 Ti235cenVicho TronicoNo ratings yet
- Brochure PDFDocument4 pagesBrochure PDFSUJITH KRISHNANNo ratings yet
- Port Performance Measurement in Practice-Vitsounis-BelgradeDocument56 pagesPort Performance Measurement in Practice-Vitsounis-BelgradeBryan YeoNo ratings yet
- FlowchartDocument3 pagesFlowchartSarah SazaliNo ratings yet
- Evaluation D'une Motopompe Kirloskar TV-1/NW9ME À Kakondji, Tombouctou, MaliDocument21 pagesEvaluation D'une Motopompe Kirloskar TV-1/NW9ME À Kakondji, Tombouctou, MaliCSL4DNo ratings yet
- AirlinesDocument28 pagesAirlinesSandraPriya Medusa MurugiahNo ratings yet
- Machine Design REE 302: Tutorial 3 (Ch.2: Materials II)Document19 pagesMachine Design REE 302: Tutorial 3 (Ch.2: Materials II)Dull PersonNo ratings yet
- Argus FMB Strategy Report World Processed Phosphates Outlook To 2028 - JW - 4Document2 pagesArgus FMB Strategy Report World Processed Phosphates Outlook To 2028 - JW - 4vahidNo ratings yet
- Slump Test ReportDocument15 pagesSlump Test ReportRuchiethaa KalaiselvanNo ratings yet