Professional Documents
Culture Documents
AD898 Overhaul Part III - Rev C
AD898 Overhaul Part III - Rev C
Uploaded by
Bala PalaniOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AD898 Overhaul Part III - Rev C
AD898 Overhaul Part III - Rev C
Uploaded by
Bala PalaniCopyright:
Available Formats
AD898 Overhaul Manual-Part III
OVERHAUL MANUAL
AD898
AUTOMATIC DIE BONDER
Part III
Module Assembly
REFERENCE
REVISION
: M164-O3
:C
COPYRIGHT NOTICE
This document contains information proprietary to ASM Assembly Automation
Ltd. No part of this publication can be reproduced, photocopied, stored on a
retrieval system or transmitted without prior written consent of ASM Assembly
Automation Ltd.
Copyright 2007 ASM Assembly Automation Ltd. All Rights Reserved.
THE INFORMATION HEREIN IS SUBJECT TO CHANGE WITHOUT PRIOR NOTICE
i
AD898 Overhaul Manual-Part III
ASM Office (Worldwide)
Should you have any inquiry about machine setup/operation, please contact the ASM office nearest to your area
for assistance. ASM
Hong Kong
ASM ASSEMBLY AUTOMATION LTD
4/F Watson Centre, 16 Kung Yip Street
Kwai Chung, Hong Kong
16 4
Tel
: 852-2619 2000
Fax
: 852-2619 2118/9
China
ASM MICROELECTRONICS TECHNICAL SERVICES
(SHANGHAI) CO., LTD
2/F, No.55 Qing Yun Road, Shanghai Zhangjiang HiTech Park, Shanghai, China
Post Code: 201203
Tel
: 86-21-5080 5465 / 5080 5466
Fax
: 86-21-5080 5467
()
55
: 201203
Tel
: 86-21-5080 5465 / 5080 5466
Fax
: 86-21-5080 5467
ASM MICROELECTRONICS TECHNICAL SERVICES
(SHANGHAI) CO., LTD
Suzhou Branch Office
Block A, #05-03/06, No.5 Xing Han Street, Suzhou
Industrial Park, Suzhou, China
Post Code: 215021
()
A 05-03/06
: 215021
Tel : 0512-67626278
Fax: 0512- 67626378
ASM MICROELECTRONICS TECHNICAL
SERVICES (SHANGHAI) CO., LTD
Shenzhen Branch Office
7/F, Asia Light Building, West Wing
No. 8, TaiRan Road 8, Block 503
TaiRan Industry & Commerce Zone, Chegong
Temple
FuTian District, Shenzhen, China
()
8
8 503 7
: 518040
Tel : 86-755-8344 6365
Fax : 86-755-8344 6245
ASM MICROELECTRONICS TECHNICAL
SERVICES(SHANGHAI) CO.,LTD
DONG GUAN OFFICE
Zhang Mu Tou Town, Dong Guan City, China
()
A A9,A10,A11
: 86-769-7125600,
: 86-769-7125601
ii
Taiwan
ASM ASSEMBLY AUTOMATION
(TAIWAN) BRANCH
10F, No. 530, Sec.2, Chung Shan Road
Chung Ho City, Taipei Hsien
Taiwan, R.O.C.
2 530 10F
Tel
: 886-2-2227 3388
Fax
: 886-2-2227 3399
No. 4-2, East 3 Road Street
N.E.P.Z. Kaohsiung
Taiwan, R.O.C.
811
4-2
Tel
: 886-7-367 6300
Fax
: 886-7-367 6399
2/F, No. 9, Lane 379, Sec 1
Ching Kuo Road
Hsin-Chu, Taiwan, R.O.C.
300
379 9 2
Tel
: 886-3-543 1500
Fax
: 886-3-543 1555
8F-1, NO. 135, Sec 2
Chung-Shan Rd, Tantzu
Taichung, Taiwan R.O.C.
Tel
: 886-4-2535 6390
Fax
: 886-4-2535 6820
Europe
ASM ASSEMBLY PRODUCTS B.V.
Jan van Eycklaan 10
3723 BC Bilthoven
The Netherlands
Tel
: 31-30-229 8411
Fax
: 31-30-225 0584
U.S.A.
ASM PACIFIC ASSEMBLY PRODUCTS
INC.
3440 East University Drive, Phoenix
Arizona 85034-7200, U.S.A.
Tel
: 1-602-437 4760
Fax
: 1-602-437 4630
West Regional Office
97 East Brokaw Road,
Suite 100, San Jose
California 95112-4209, U.S.A.
Tel
: 1-408-451 0800
Fax
: 1-408-451 0808
Singapore
ASM TECHNOLOGY SINGAPORE PTE LTD
2 Yishun Avenue 7
Singapore 768924
Tel
: 65-6752 6311
Fax
: 65-6758 2287
Malaysia
ASM ASSEMBLY EQUIPMENT MALAYSIA
SDN. BHD.
Bayan Point, Block A, No: 15-1-23
Medan Kampung Relau, 11900
Penang, Malaysia
Tel
: 60-4-644 9490
Fax : 60-4-645 1294
ASM MUAR
17 Tingkat Satu, Jalan Mulia Satu
Taman Sri Mulia, Sungai Abong
84000, Muar, Johor, Malaysia
Tel
: 60-6-951 5713
Fax : 60-6-951 5786
Thailand
ASM ASSEMBLY EQUIPMENT BANGKOK
LTD.
51/3, Vibhavadi Tower, 18/2 Floor
Ngamwongwan Road, Ladyao,
Chathuchak, Bangkok 10900
Thailand
Tel
: 66-2-941 3181/2
Fax : 66-2-941 3183
Japan
ASM ASSEMBLY TECHNOLOGY CO LTD
5F, Tachikawa F-Bldg, 1-7-18, Nishiki-cho
Tachikawa-shi, Tokyo 196-0022, Japan
Tel
: 81-42-521-7751
Fax : 81-42-521-7750
Korea
ZEMOS KOREA INC./
ASM PACIFIC KOR LTD
3F, 628-6, Deung Chon Dong
Kangseo Gu, Seoul, 157-030, Korea
Tel
: 82-2-538 5900
Fax : 82-2-561 5905
ASM PACIFIC KOR LTD.
Rm501, 5F., Hi-Tech Center, 958-14
Daechon-dong, Buk-gu, Gwangju
500-470, KOREA
Tel
: 82-62-973 4174
Fax : 82-62-973 4216
Philippines
CAPITAL EQUIPMENT DISTRIBUTION LTD
2108 Prime Street
Corner Enterprise Street
Madrigal Business Park
Alabang, Muntinlupa City
Philippines 1770
Tel
: 63-2-850 4543
Fax : 63-2-850 4547
AD898 Overhaul Manual-Part III
Table Of Contents
CHAPTER 1
INTRODUCTION....................................................................... 1-1
1.1
AD898 Main Module List .......................................................................................... 1-1
1.2
Overhaul Flowchart ................................................................................................. 1-2
CHAPTER 2
2.1
MODULE ASSEMBLY ................................................................ 2-1
Bond Head Table .................................................................................................... 2-1
2.1.1
Bond Head Specification Check List ..................................................................................2-1
2.1.2
Bondhead Table Assembly .................................................................................................2-2
2.2
Bond Optic Table .................................................................................................. 2-10
2.2.1
Bond Optic table Specification Check List........................................................................2-10
2.2.2
Bond Optic Table Assembly..............................................................................................2-10
2.3
Workholder .......................................................................................................... 2-15
2.3.1
Workholder Specificaitons Check List ..............................................................................2-15
2.3.2
Workholder Assembly .......................................................................................................2-15
2.4
Epoxy Table ......................................................................................................... 2-27
2.4.1
Epoxy Writer Table Specification Check List....................................................................2-27
2.4.2
Epoxy Writer Assembly.....................................................................................................2-27
2.5
Ejector................................................................................................................. 2-32
2.5.1
Ejector Specification Check List .......................................................................................2-32
2.5.2
Multiple Ejector Assembly.................................................................................................2-32
2.6
Wafer Table ......................................................................................................... 2-42
2.6.1
Wafer Table Specification Check List...............................................................................2-42
2.6.2
Wafer Table Assembly......................................................................................................2-42
2.7
Wafer Ring Assembly (8 Wafer Ring)..................................................................... 2-45
2.7.1
Wafer Ring Specifications Check List...............................................................................2-45
2.7.2
Wafer Ring Assembly .......................................................................................................2-45
2.8
Wafer Expander Assembly ..................................................................................... 2-48
2.8.1
Wafer Expander Specifications Check List.......................................................................2-48
2.8.2
8 inches wafer expander assembly procedures ...............................................................2-48
2.9
Leadframe Loader................................................................................................. 2-51
2.9.1
Leadframe Loader Specification Check List .....................................................................2-51
2.9.2
Leadframe Loader Assembly............................................................................................2-51
2.10
Stack Loader ........................................................................................................ 2-54
CHAPTER 3
TOOL LIST ............................................................................. 3-1
CHAPTER 4
GREASE AND LUBRICANT......................................................... 4-1
4.1
Tools for Preventive Maintenance ............................................................................. 4-2
AD898 Overhaul Manual-Part III
CHAPTER 5
LOCTITE AND WHERE TO USE .................................................. 5-2
CHAPTER 6
STANDARD LM GUIDE/CROSS ROLLER WAY ASSEMBLY .............. 6-2
6.1
Cross Roller Way..................................................................................................... 6-2
6.2
LM Guide ............................................................................................................... 6-5
6.3
A/C Bearing............................................................................................................ 6-7
6.4
Ballscrew ............................................................................................................... 6-9
6.5
Timing Belt........................................................................................................... 6-11
6.6
Coupling .............................................................................................................. 6-12
CHAPTER 7
VOICE COIL & LINEAR MOTOR RESISTANCE .............................. 7-1
CHAPTER 8
SCREW USAGES AND REQUIREMENTS ....................................... 8-1
ii
AD898 Overhaul Manual-Part III
Revision History Record
Revision History Record
Revision
Revision Description
Initial Release
Add tools and grease/ oil pictures
Update the procedure and pictures on Ch2 and add voice coil
and linear motor resistance on Ch7
Amended
Section
Ch3, Ch4 & Ch5
Ch2 & Ch7
AD898 Overhaul Manual
Ch1 Introduction
Chapter 1
Introduction
Overhaul is a part of Machine Preventive Maintenance which refers to thorough examination
followed by any necessary repairs. The need of overhaul mainly depends on machine
utilization, requirements, operating condition and etc. In general, it could be done when the
machine has been servicing for long time. It includes dismantle and assembly of main
modules or the whole machine. This manual shows the overhaul procedures of main machine
modules.
1.1
AD898 Main Module List
Bondhead Table
Bond Optic Table
Wafer Optic Table
Workholder
Epoxy Writer Table
Ejector Table
Wafer Table
Wafer Expander
Wafer Loader
Stack Loader
Leadframe Loader
Epoxy Writer
Table
Stack
Loader
Bond Head
Ejector
Table
Wafer
Expander
Part III 1-1
AD898 Overhaul Manual
Ch1 Introduction
1.2
Overhaul Flowchart
Below flowchart gives the general procedure of overhauling AD898.
Design the overhaul plan
Are all the
spare parts and
tools ready?
No
Order necessary
parts and tools
Yes
AD898/AD8912 Key modules for overhaul
Bondhead Table
2.1
Bond Optic Table
2.2
Wafer Optic Table
Workholder
2.3
Epoxy Table
2.4
Ejector
2.5
Wafer Table
2.6
Wafer Ring
2.7
Wafer Expander
2.8
Wafer Loader
Leadframe Loader
2.9
Stackloader
2.10
Check the key parts of modules and
sub-modules and see if repair or
replacement is needed
Perform modules disassembly, parts
replacement and assembly
Is there any
other module for
overhaul?
Yes
No
Machine integration and module alignment
*Please refer to Intermediate Machine Setup Manual
Device setup for bonding quality check
*Please refer to Operation Manual
End
Part III 1-2
AD898 Overhaul Manual
Ch2 Module Assembly
Chapter 2
Module Assembly
2.1
Bond Head Table
2.1.1
Bond Head Specification Check List
Item Description
Specification/requirement
Y axis LM Guide
Note: Use THK AFF Grease
1
Y LM Guide parallelism
<10m
2
Y LM Guide Block sliding force
100-400gf (each)
3
Y With YZ bracket sliding force
250-650gf
Z axis LM Guide
Note : Use THK AFF Grease
4
Z LM Guide parallelism
<10m
5
Z LM Guide Block sliding force
30-130gf
6
Z LM Guide with loading (Z Back
200-450gf
Plate)
Y axis Ballscrew assembly
Note : Use NSK LG2 Grease
7
Y axis ball screw forward preload
A1=100-400gfcm, <=150gfcm
8
Y axis ball screw backward preload
With loading (forward)
Result
A1=
<=
A2=
<=
A11=
<=
A22=
<=
A2=100-400gfcm, <=150gfcm
A11= A1+(150-200gfcm),
<=150gfcm
10
With loading (backward)
A22=A2+(150-200gfcm),
<=150gfcm
11
Y axis and Z guide rail parallelism
<=0.04mm
Z axis Ballscrew assembly
Note: Use NSK LG2 Grease
12
Z axis ball screw forward preload
B1=100-400gfcm, <=150gfcm
13
Z axis ball screw backward preload
B2=100-400gfcm
<=150gfcm
14
With loading (forward)
B11=B1+(150-200)gfcm,
<=150gfcm
15
With loading (backward)
B22=B2+(150-200)gfcm,
<=150gfcm
Z front guide LM Guide plate
Note: Use THK AFF Grease
16
LM Guide preload
30-130gf (each)
17
No gap between the bearings and the Z Visual Check. The bearings should
guide plate
move at the same time and the torque
increment cannot more than 20gfcm
18
Z moving distance
32-34mm
Micro X cross roller ways
Use: Staburags Grease NBU12/300KP
19
Cross roller ways sliding force
22-32gf
Micro X play
<0.002mm gap
20
Check play between cross roller way
using 2kgf applied at one cross roller
ways
21
Locking force for the M3 screw
>= 15kgfcm
B1=
<=
B2
<=
B11=
<=
B22=
<=
Part III 2-1
AD898 Overhaul Manual
Ch2 Module Assembly
22
Y axis Toque after install the Z front
guide link with the Z bar
Others
23
Check wiring and cable
24
Vacuum reading
25
Micro X calibration
26
Bond head Y encoder calibration
The Y axis torque will be increase
less than 20m
No folding
<=-85Kpa
Refer to setup manual
Refer to setup manual
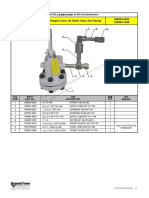
Bondhead Table Assembly
2.1.2
Tools and Equipment Preparation
1) Grease gun
2) 6 G clamp
3) 100-1000gf gram gauge
4) 50-500gf gram gauge
5) 25-250gf gram gauge
6) 5-50gf gram gauge
7) Loctite #222
8) 4 & 6 Spanner
9) 1200gfcm torque driver
10) dial gauge: resolution 1um
11) Torque Driver (50 kgfcm)
12) MicroX Calibration Equipment
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Add AFF grease into the Y and Z LM Guide Block as Figure 2-1 and Figure 2-2.
3) Check the Y LM Guide Block preload force with a gram gauge for each side should
be 100-400gram and on Z LM Guide Block preload force should be 30-130gram.
4) Add LG2 grease into the Z ballscrew and Y ballscrew.
Figure 2-1 Add grease to Y LM Guide Block
Figure 2-2 Add grease to Z LM Guide Blocks
5) Use a G Clamp to clamp the Bond Head Y table LM Guide rail. Check the parallelism
of the LM Guides if it is less than 10um and then tighten the six M4X14 with spring
lock screws at 42kgfcm added with loctite#222 as Figure 2-3.
Part III 2-2
AD898 Overhaul Manual
Ch2 Module Assembly
6) Use a G clamp to clamp the Bond Head Z table LM guide rail. Check the parallelism
of the LM Guides if it is less than 10um and then tighten the four M3X12 with spring
lock screws at 20kgfcm added with loctite#222 as Figure 2-4.
Figure 2-3 Use G clamp to fix Y LM Guide Rails
Figure 2-4 Use G clamp to fix Z LM Guide Rail
7) Install the YZ Bracket on the LM Guide Blocks using four M4X12 screws with
springs added with loctite#222.
8) Check the sliding force on the Y LM Guide with the YZ Bracket with a gram gauge
as Figure 2-5. The specification should be within 250 to 650gram.
9) Similarly, install the BH Back Plate on the Z LM Guide Blocks using sixteen M4X8
screws with springs added with loctite#222.
10) Tighten the Z table mount set screw with 2.5kgcm force.
11) Measure the Z LM Guide with gram gauge and the specification is within 200 to
450gram as Figure 2-6.
Figure 2-5 Check the YZ Bracket sliding force
Figure 2-6 Check the BH Back Plate sliding force
12) Assemble the parts in A as B shown as Figure 2-7
13) Measure the Y ballscrew preload force with a torque gauge. The specification is 100400gfcm and the variation is less than 150gfcm.
14) Install sub-assembly parts and the ballscrew as Figure 2-8.
15) Mount the part B onto the BH table.
Part III 2-3
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-7 Assembly the Y stopper
Figure 2-8 Assembly the Y ballscrew sub-assembly
16) Install the parts as shown in Figure 2-8 into the Y table LM guide as shown in Figure
2-9.
17) Do not tighten the screws. Slightly tighten the lock screws as shown in Figure 2-9 and
then measure the torque with torque gauge. Rotate the ballscrew and then tighten the
lock screws slowly if you get the lowest torque reading (250-600gram). The
specifications for the torque variation within 150gfcm.
Lock screws
Figure 2-9 Check the driving torque of Y ballscrew
18) Similarly, install the Z ballscrew parts as shown in Figure 2-10 and Figure 2-11 to the
Z base plate as Figure 2-12.
19) Rotate the Z ballscrew and slightly tighten the lock screw and monitor the torque and
then tighten the lock screw to get minimum torque. The torque specification for the
back and forth motion is within 100 to 400gfcm and variation is 150gfcm.
Figure 2-10 Assembly the Z ballscrew sub-assembly
Part III 2-4
Figure 2-11 Assembly the Z stopper
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-12 Install the Z ballscrew and stopper
20) After installing the ballscrew in the BH Z base plate and put the Z base plate assembly
to the BH table base and rotate the ballscrew and adjust all the related lock screws so
that the torque is within the specification.
21) Mount a dial gauge at the Y motion assembly as Figure 2-13.
22) Measure the parallelism of the Z guide rail respective with the Y LM guide. The
specification is within 40um.
Figure 2-13 Check parallelism of Z Guide Rail respect to Y LM Guide
23) Assemble Figure 2-14 parts as shown in Figure 2-15.
Figure 2-14 Assembly the Z front guide CRW
Figure 2-15 Check the CRW sliding force
Part III 2-5
AD898 Overhaul Manual
Ch2 Module Assembly
24) Adjust the set screw by torque driver and then measure the sliding force with a 50g
gram gauge. The specification is between 22 to 32gf.
25) Assembly the LM guide onto the parts as Figure 2-16. Be careful of the LM Guide
Block wont come out from the LM Guide. Or adding the stopper at both ends.
26) Put the Z clamp bearing assembly shown in Figure 2-16 onto the Figure 2-17.
27) Adjust the clamp bearing on the X plate guide. The gap should be zero between the
bearings and the guide. After adjusting the clamp bearing, check the Y motion
ballscrew torque again. The increased torque should not be larger than 20gfcm.
Clamp
bearing
Stopper
Linear
encoder
read head
Figure 2-16 Assembly the LM Guide to Z front guide
Figure 2-17
28) Install the Micro X read head and the electronic ruler shown in Figure 2-18 onto the
Micro X position as shown in Figure 2-19.
Electronic
ruler
Read
head
Figure 2-18 Micro-X Encoder and Linear Scale
Figure 2-19 Check the Micro-X Waveform
29) Adjust the gap between the electronic ruler and read head to 1mm.
30) Connect the read head cable to PWM 8 and oscilloscope.
31) Adjusting the read head position until we can get required specification. (Note: the
details calibration may refer to the setup manual)
32) Assemble pneumatics tube and parts as shown in Figure 2-20 and tighten set screws to
avoid pressure air leakage.
33) Assemble the parts and wiring as Figure 2-21 to Figure 2-23.
Part III 2-6
AD898 Overhaul Manual
Ch2 Module Assembly
Set screws
position
Figure 2-20
Figure 2-21
Figure 2-22
Figure 2-23
34) Connecting all the wiring and pneumatics tubes in sequence as shown in Figure 2-24
to Figure 2-28.
Figure 2-24
Figure 2-25
Part III 2-7
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-26
Figure 2-27
Figure 2-28
Figure 2-29
35) Install the AC servo motor to the BH assembly as Figure 2-30.
Figure 2-30 Finished BH Table Assembly
36) Adjust the BHY Scan Head and Encoder Scale position by inserting a 0.8mm spacer
between the scan head and encoder scale and then lock the screw and remove the
spacer.
Figure 2-31 0.8mm Spacer
Part III 2-8
AD898 Overhaul Manual
Ch2 Module Assembly
37) Adjust the following two screws of the encoder yaw adjustment block in up/down
direction, until the gap is 0.8mm as in Figure 2-32.
Figure 2-32 Adjust the gap is 0.8mm
38) Adjust the following two screws of the encoder pitch adjustment block in left/right
direction, until the green LED (of encoder) is ON throughout the traveling range of
encoder scale as in Figure 2-33.
Figure 2-33 Adjust position until green LED is all the way ON
39) Adjust the reference mark such that when homing the read head to the reference mark
should light red.
Part III 2-9
AD898 Overhaul Manual
Ch2 Module Assembly
2.2
Bond Optic Table
2.2.1
Bond Optic table Specification Check List
Item Description
Specification/requirement Result
Y Optic table assembly
Note: use AFF grease for LM Guide, NBU 12/300 KP grease for cross roller ways
1
LM Guide rail parallelism
<10m
2
LM rails leveling
<10m
3
LM Guide block preload
40-90gfcm (each)
4
LM Guide with loading (forward or backward) 150-400gfcm
5
Gap between linear motor and magnet
1.1~1.4mm
6
Cross roller ways sliding force
140-180gf
7
Y Table sliding force with loading
800gf
8
Leadscrew torque with loading
200-400gfcm
9
Y direction traveling distance
<84mm
2.2.2
Bond Optic Table Assembly
Tools and Equipment Preparation
1) Gram gauge
2) Dial indicator
3) Feeler gauge
4) Torque gauge
5) Torque driver
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Use 6 M4X12 screws with springs to mount the (OB) Magnet Mount onto the (OB)
Table Base as Figure 2-34.
Figure 2-34 Mounting of Magnet Mount onto the Table Base
3) Use 4 M4X18 screws with springs to mount the (OB) Adj. Hard Stopper (L & R) to
the (OB) Table Base as Figure 2-35.
Part III 2-10
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-35 Mounting of Adjustment Hard Stopper
4) Add AFF grease into the Y and Z LM block as Figure 2-36.
Figure 2-36 Greasing on the LM Guide Blocks
5) Check the LM preload force with a gram gauge. The specification should be within 40
to 90gf.
6) Use 10 M3X12 screws with springs to mount the LM Guide onto the (OB) Table Base.
LM Guide with KB mark should put on the reference side.
LM Guide Blocks without KB mark and with smooth side should face out.
Parallelism of LM Guide should <10um.
Leveling of LM Guide should <10um.
5 screws
to KB side
Figure 2-37 Mounting of LM Guide onto the Table Base
7) Install the LM guide on the Y table. Tighten the lock screws with 20kgfcm force.
8) Use 16 M4X16 screws with springs to mount the (OB) Y Sliding Plate onto the LM
Guide as in Figure 2-38.
Parallelism of the (OB) Y Sliding Plate to the LM Guide should <0.01mm.
Gap between them should be 1.1~1.4mm.
Sliding force of the (OB) Y Sliding Plate should 800g.
Part III 2-11
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-38 Mounting of Y Sliding Plate onto the LM Guide
9) Install the magnet onto table. Be careful of the direction of the magnet. The five screw
hole should be close to the reference surface as Figure 2-37.
10) Use 4 M4X12 screws with springs to mount the (OB) Fixed Hard Stopper (L & R) to
the (OB) Table Base as in Figure 2-39.
Figure 2-39 Mounting of Fixed Hard Stopper
11) Use 2 M3X6 flat screws to mount the cable clamp onto the (OB) Table Base.
Figure 2-40 Mounting of Cable Clamps
12) Use 2 M4X12 screws with springs to mount the (OB) Y-Sensor Holder onto the (OB)
Table Base as in Figure 2-41.
Figure 2-41 Mounting of Y-Sensor Holder
Part III 2-12
AD898 Overhaul Manual
Ch2 Module Assembly
13) Use 2 M3X8 screws with springs to mount the (OB) Y Sensor Flag onto the (OB) Y
Sliding Plate as in Figure 2-42.
Figure 2-42 Mounting of Y Sensor Flag
14) Assemble the linear motor as Figure 2-43.
15) Check the lighting of the linear encoder. Green light should be observed along the
way. If red LED is on, adjust the linear encoder lock screw as shown Figure 2-43.
Set screw for encoder
adjustment
Lighting position
Figure 2-43 Checking of Linear Encoder
16) Assemble the part A into part B through the cross roller as adjustment table as in
Figure 2-44. Check the sliding force if within 140-180gf with the gram gauge. Set the
force by adjust the set screws (let say 0.8kg) on the adjustable cross roller way. After
that, use the torque driver to tighten all the screws. The torque should be 20kgfcm.
17) Assemble X-leadscrew and X-nut. The torque specification should be within 200400gfcm with the use of torque gauge as Figure 2-45.
18) Install all the parts as shown in Figure 2-46.
19) Make sure all the sensor flags cannot be crashed with the sensor. There should be
signal only sensor flag cut in the middle of the sensor. The traveling distance of
sensor flag Y should be kept less than 84mm.
Part A
Part B
Figure 2-44 Assembly of Cross Roller Way
Part III 2-13
AD898 Overhaul Manual
Ch2 Module Assembly
X leadscrew
Figure 2-45 Assembly and Check the Torque of the X Leadscrew
Figure 2-46 Finished Module
Part III 2-14
AD898 Overhaul Manual
Ch2 Module Assembly
2.3
Workholder
2.3.1
Workholder Specificaitons Check List
Item Description
Specification/requirement
Result
Left Workholder stand
Note: NBU 12/300KP for cross roller ways and NSK Grease PS2 for ballscrew
1
Y Cross roller way sliding force
250-350gf
2
Z Cross roller way sliding force
150-250gf
3
Y leadscrew torque with loading
150-300gfcm
4
Z leadscrew torque with loading
150-300gfcm
5
Play check
10um
Right Workholder stand
Note: NBU 12/300KP for cross roller ways and NSK Grease PS2 for ballscrew
6
Y Cross roller way sliding force
250-350gf
7
Z Cross roller way sliding force
150-250gf
8
Y ballscrew torque with loading
150-300gfcm
9
Z ballscrew torque with loading
150-300gfcm
Indexer Assembly
Note: AFF Grease for LM Guide
10
LM Guide preload
A1=30-100gf (each)
11
LM Guide after equipped with linear A11=A1+(0-100gf)
motor
12
LM guide parallelism between datum 10um
13
LF support lower than the lower claw 10-30um
jaw
14
Indexer lower jaw leveling with the
<5um
LM guide
15
Torque for the LM Guide lock screw 18kgfcm with some loctite#222
16
Torque for the Indexer lower jaw
8kgfcm
lock screw
17
Torque for the Indexer Clamp screw 18kgcm
18
Torque for the Indexer wire clamp
15kgcm
19
Indexer clamp force in X direction
800gfcm
(Use SOIC LF)
20
Indexer clamp force in Y direction
400gfcm
(Use SOIC LF)
21
Indexer cable tension
Move the indexer to the stopper and
then release and the indexer cannot
bound back more than 30mm
22
Gap between upper and lower jaw
1.6mm
2.3.2
Workholder Assembly
Tools and Equipment Preparation
1) Gram gauge
2) Dial gauge
3) Torque gauge
4) Torque driver
Part III 2-15
AD898 Overhaul Manual
Ch2 Module Assembly
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Check the preload force of LM guides. The specification should be less than 30100gfcm for each LM guide.
3) Install the LM guides onto the index base. Tighten the screws.
4) Use the dial gauge to measure the parallelism which should be less than 10um as in
Figure 2-47 and Figure 2-48.
LM guide
Figure 2-47 Check the parallelism of the LM Guide
Figure 2-48 Method of measuring parallelism
5) Install the four indexer clamps onto the LM guides. Tighten the screw with torque at
18kgfcm.
Indexer clamp
Linear encoder
LM guide
Figure 2-49 Sticking the Golden Scale
6) Install the linear encoder into the indexer clamp. Adjust the lock screw such that the
encoder have green light without blinking all the way of the encoder.
7) Install the coil with the clamp and tidy up all the wires using wire support as Figure
2-50. Tighten the 2 M3X14 with spring lock screws with torque equals to 15kgfcm.
Part III 2-16
AD898 Overhaul Manual
Ch2 Module Assembly
Wire support
Lock screws (2
M3X14 with
spring washers)
Coil
Figure 2-50 Install the coil with the clamp
8) Install all the parts and wiring as shown in Figure 2-51 and Figure 2-52.
2 M3X8
Flat Screw
Figure 2-51 Connect the cables
Figure 2-52 Tide up the cables
9) Install two magnet bars as Figure 2-53 such that the coil is surrounded by the two
magnets
Magnet bar
Reference mark
Coil is located between
two magnet bars
Figure 2-53 Install the magnet bars
10) Measure the parallelism of the three lower jaws. Use the lowest one as the reference
as shown from Figure 2-54 to Figure 2-57. Adjust the other lower jaws in order to
meet the specification. For single jaw, the parallelism should be less than 5um. The
parallelism for all the lower jaw throughout the workholder should be less than 20um
Part III 2-17
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-54 Check the level on Input Indexer
Figure 2-55 Check the level on Dispense
Indexer
Figure 2-56 Check the level on Dispense
Indexer near mid way
Figure 2-57 Check the level on Bond Indexer
Input clamp
lower jaw
Dial gauge
Figure 2-58 Check the parallelism of the Input Indexer lower jaw
Part III 2-18
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-59 The parallelism of the single lower jaw should less than 5um
11) Install the leadframe support into the workholder as Figure 2-60. The leadframe
support should be lower than the lower jaws by 10-30um.
Leadframe support
Figure 2-60 Checking the LF Support Level
12) Install the upper jaw with clamp plate using six M3 screws.
13) Install the clamp plate with index clamp such that the gap between upper jaw and
lower jaw should be 1.6mm.
2 M3X8
Flat Screw
Clamp plate
Figure 2-61
Part III 2-19
AD898 Overhaul Manual
Ch2 Module Assembly
14) Adjust the linear encoder mount such that the encoder will off the light when pass the
reference mark but green light throughout the workholder.
15) Check the distance between the reference mark and the home sensor should be 1mm
0.2mm. If not, adjust the home sensor mount to achieve the specification.
Home sensor
Position of
reference mark
Figure 2-62 Adjust the Home Sensor Position
16) Install the double leadframe sensor and the sensor mount as Figure 2-63.
Double lead frame sensor
and sensor mount
The right most wire is
number 1 while the left
most wire is number 5
Figure 2-63 Mount the Double LF Sensor
17) The wiring of the workholder was shown in the following Figure 2-64.
Part III 2-20
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-64 Wiring for the indexer clamp
Wire 1
Wire 2
Wire 3
Wire 4
Wire 5
Black colour
Red colour
Green/Black colour
Blue/Black colour
Red/Black colour
Figure 2-65
Clamp coil
Clamp coil
Linear motor
Linear motor
Linear motor
Figure 2-66
Part III 2-21
AD898 Overhaul Manual
Ch2 Module Assembly
For the LF adjust assembly:
There are two parts for the assembly. Y direction control the track width while the Z direction
control the downset.
1. Clean all mechanical parts with alcohol and dustless paper or clothes.
2. Add grease into the cross roller with NBU 12/300KP.
3. Install two pairs of cross roller into the module as Figure 2-67. The force for Y
direction should be 250gf-350gf while Z direction should be 150gf-250gf. Force can
be adjusted by set screw at the side of cross roller.
Table Y
Z direction cross
roller
Y direction cross roller
Table Z
Bed
Figure 2-67
4. Add grease to A/C bearing with NBU 12/300KP.
5. Install Y direction leadscrew into the table as Figure 2-68.
A/C bearing
Figure 2-68 Install the Y direction leadscrew
6. Add grease PS2 into the leadscrew. Install the Z direction leadscrew and A/C bearing.
The torque should be within 100-300gfcm. Make sure the left bed and right bed have
the same height.
Part III 2-22
AD898 Overhaul Manual
Ch2 Module Assembly
A/C bearing
Figure 2-69 Z direction ballscrew
7. For Y direction: Add grease NBU 12/300KP into MC bearing. Tighten one side of
bearing cover and then adjust the other side such that the worm shaft have torque
between 150-300gf.
Worm shaft
Figure 2-70
8. For right side Z direction, assemble MC bearing and add grease with NBU 12/300KP.
Adjust bearing cover such that the torque within 150-300gf.
Part III 2-23
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-71 Z direction right side
9. Install Z direction left side as mention in procedure 8.
Figure 2-72 Z direction left side
10. Check the parallelism of Y and Z table. The left and right stand maximum difference
should be less than 0.03mm and the leveling should be less than 0.03mm as well.
11. As Figure 2-73, install the Z direction worm gear by using C-clamp to adjust the
worm gear position such that the worm shaft and worm gear work smoothly.
Worm shaft
Worm gear
Figure 2-73 Z Direction Worm Gear
Part III 2-24
AD898 Overhaul Manual
Ch2 Module Assembly
12. Install Y direction worm gear as mention in procedure 11.
Worm gear
Worm shaft
Figure 2-74 Install the Y direction worm gear
13. Check the total torque of the table should be within 150-300gfcm. If out of
specification, adjust the position of worm gear.
Figure 2-75 Check the torque of the worm gear
14. Add PS2 grease into worm gear and worm shaft. Install the motors and sensors as
Figure 2-76.
Left table
Right Table
Figure 2-76 Left and right WH stand
Part III 2-25
AD898 Overhaul Manual
Ch2 Module Assembly
For the front track:
1. Assemble drop-off alignment clamp as shown in Figure 2-77.
Figure 2-77 Drop off alignment clamp
2. Install the dowel pin and flat screw onto the front track as Figure 2-78.
Flat screw
Dowel pin
Figure 2-78 Install the dowel pins and flat screws
3. Install the platform blocks.
Figure 2-79 Different Platform Blocks
4. Install the anvil blocks and measure the parallelism of the surface should be within 00-0.03mm.
5. Finished module as shown in Figure 2-80.
Figure 2-80 The finished front track module
Part III 2-26
AD898 Overhaul Manual
Ch2 Module Assembly
2.4
Epoxy Table
2.4.1
Epoxy Writer Table Specification Check List
Item Description
Specification/requirement
Result
X table Installation
Note: AFF grease for LM, NSK PS2 or LG2 grease for ballscrew
1
X LM Guide parallelism
<10um
2
LM Guide preload
50-150gf (each)
3
LM with loading
200-500gf
4
X ballscrew preload (forward)
A1= 100-400gfcm, Max Range 150gfcm
Variation 100gfcm
5
X ballscrew preload (backward) A2= 100-400gfcm, Max Range 150gfcm
Variation 100gfcm
6
X ballscrew with loading
A11=A1+50gfcm, Max Range 150gfcm
(forward)
Variation 100gfcm
7
X ballscrew with loading
A21=A2+50gfcm, Max Range 150gfcm
(backward)
Variation 100gfcm
Y table Installation
Note: AFF grease for LM, NSK PS2 or LG2 grease for ballscrew
8
Y LM Guide parallelism
<10um
9
LM Guide preload
100-400gf (each)
10
LM with loading
400-1000gf
11
Y ballscrew preload (forward)
B1=100-400gfcm, Variation 150gfcm
12
Y ballscrew preload (backward) B2=100-400gfcm
13
Y ballscrew with loading
B11=B1+50gfcm, Variation 150gfcm
(forward)
14
Y ballscrew with loading
B22=B2+50gfcm, Variation 150gfcm
(backward)
Z LM Guide
Note: Use AFF grease for Z LM
15
LM guide block with loading
100-200gf
16
Z Spring force
3.1 - 4.65 KG
17
XY table leveling
30um
2.4.2
Epoxy Writer Assembly
Tools and Equipment Preparation
1) Gram Gauge (25-250gf, 50-500gf, 100-1000gf)
2) Torque Driver
3) Torque Gauge
4) Push & Pull Gauge
5) G Clamp
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Add AFF grease into the LM Guide Block as Figure 2-81.
Part III 2-27
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-81 Adding grease to the LM Guide
3) Add NSK grease PS2 or LG2 into the ballscrew.
4) Check the parallelism of the two sides of the Y table. The parallelism should be less
than 10um.
5) Check the preload force of the both X and Y LM guide by gram gauge. The X LM
guide should be between 50-150gf for each LM guide block while the Y direction LM
guide should be within 100-400gf.
6) After install the table, the table X sliding force is between 200gf-500gf while the Y
table is 400-1000gf.
7) Check the torque of the ballscrew for both X and Y direction. For the X direction, the
torque for clockwise and anti-clockwise direction should be between 100-400gfcm
while variation less than 150gfcm. For Y direction, the torque for both clockwise and
anticlockwise direction is 100-400gfcm while variation less than 150gfcm.
8) Install the LM guides with torque force 42kgfcm as Figure 2-82.
Figure 2-82 Install the LM guides
9) Assemble part A onto the LM guide as Figure 2-83.
10) Install the A/C ball bearing. Check the torque again and the specification is the LM
guide torque plus 50gfcm while the variation is less than 150gfcm as Figure 2-84.
Part A
Testing point
Figure 2-83 Put on the X table over the Y table
11) Install the ballscrew and then check the torque. The total torque should be A/C
bearing torque plus 150-200gfcm while the variation less than 100gfcm as Figure
2-85.
Part III 2-28
AD898 Overhaul Manual
Ch2 Module Assembly
Testing point
for torque
Figure 2-84
Figure 2-85
12) Install the two LM guide on the X table as Figure 2-86. Tighten all the screws with
torque at 20kgfcm.
Testing point for
table Y direction
Figure 2-86 Check the Y driving torque with loading
13) Assemble part B onto the LM guide. Check the force of the table in X direction in
both clockwise and anti-clockwise direction as the specification should within 200500gfcm as Figure 2-87.
Testing point for table
X direction
Part B
Figure 2-87 Check the X driving torque with loading
14) Install the ballscrew and bearing and check the torque. The specification is ballscrew
preload torque plus 50gfcm with variation less than 100gfcm.
15) Check the overall torque. The specification is ballscrew preload torque plus 100150gfcm with variation less than 100gfcm.
16) Assemble the A/C bearing as Figure 2-88.
Part III 2-29
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-88 Assembly the A/C bearings
17) Check the preload force of the Z LM guide with specification between 100-200gf.
18) Install the Z-axis LM guide onto the table and tighten all the screws. The torque of the
screws should be 20kgfcm.
19) Install Z-eccentric shaft and part C as shown in Figure 2-89.
Part C
Figure 2-89 Install the Z-eccentric shaft
20) Install part D onto the LM guides. Be careful that part D should stay near the
reference side and then tighten all the screws. Check the force with the use of gram
gauge. The specification should be within 100-200gf.
Part D
Figure 2-90
21) Install all the parts as shown in Figure 2-91. The spring force specification is 3.104.65kg.
Spring
Z-direction
testing point
Figure 2-91
Part III 2-30
AD898 Overhaul Manual
Ch2 Module Assembly
22) Push the X, Y table to the limits and check the parallelism of the Z-bracket should
less than 0.03mm.
23) Assemble all the parts as shown in Figure 2-92 and Figure 2-93. Check the preload
force of the cross rollers should within 130-170gf.
Figure 2-92
Figure 2-93
24) Arrange all the wires.
25) The below Figure 2-94 and Figure 2-95 show the finished epoxy writer.
Figure 2-94 Epoxy writer (1)
Figure 2-95 Epoxy writer (2)
Part III 2-31
AD898 Overhaul Manual
Ch2 Module Assembly
2.5
Ejector
2.5.1
Ejector Specification Check List
Item Description
Specification/requirement
Result
XY Table Assy
Note: JoJoba oil for leadscrew, NBU 12/300 KP for cross roller ways
1
X and Y Table cross roller ways 10um
parallelism
2
XY Table sliding force
200~600gf
3
Timing belt tension
230-300Hz (for 73-10522 grey one)
500-600Hz (for 73-10055 black one)
4
Z Up down mount Sliding force
65-85gf
5
Ejector pin up down sliding force 18-25gf
6
Up down cylinder cross roller
35-45gf
ways sliding force
7
No play after installing the
Visual check by camera or use dial
ejector pin
gauge to check
8
Ejector Vacuum
-35KPa or 50cmhg
9
Ejector cam adjust to lowest
When home sensor flag block the
position
sensor, the cam should at the lowest
position. When turn 90 clockwise, it
should be at the highest position.
2.5.2
Multiple Ejector Assembly
Tools or Equipment Preparation
1) Belt tension meter
2) Grease
3) Gram Gauge 5~50 Gram
4) Gram Gauge 10~100 Gram
5) Gram Gauge 50~500 Gram
6) Allen Keys (Metric) include 1.0mm one
7) Spanner
8) Hook
9) Shim Paper
10) Loctite# 222
Assembly Procedures
1) Clean all the part and cross roller ways with alcohol and dustless paper.
2) Add some anti-rusting grease on the cross roller way and appropriate grease on the
cross roller.
3) Add small amount of loctite# 222 on set screws and lock screws.
4) Use 10 M3X10 screws with springs to mount the Cross Roller Way CRW2-75 (inner
part) onto the (EJ) X-Plate Offset Knob as in Figure 2-96.
Part III 2-32
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-96 Install the Cross Roller Way onto the X Plate
Figure 2-97 Install the Fixed and Adjustable CRW
5) Use 5 M3X16 screws with springs to mount the Fixed Cross Roller Way CRW2-75
on the left hand side of the (EJUD) Ejector Base Offset Knob. And put the together
with the adjustable CRW on the right and use 5 M3X16 screws with springs to fix its
position as in Figure 2-97.
Figure 2-98 Adjust the set screw to get the correct sliding force
6) Use 5 M3X6 set screws to adjust the sliding force of around 200~600g as in Figure
2-98. After adjusting the sliding force, tighten the lock screw with torque at 20kgfcm.
Figure 2-99 Install the CRW onto the X-Adjust Screw and Y-Block Assy.
Part III 2-33
AD898 Overhaul Manual
Ch2 Module Assembly
7) Use 6 M3X10 screws with springs to mount the Cross Roller Way G2-45 (inner) onto
the (EJ) X-Adj. Screw and Y-Block Assy as in Figure 2-99.
8) Install springs and leadscrew at the ejector base as shown in Figure 2-100.
Spring
Leadscrew
Figure 2-100 Install the spring and leadscrew
Figure 2-101 Install the fixed and adjustable CRW
9) Use 3 M3X8 screws with springs to mount the Fixed Cross Roller Way G2-45 onto
one side of the (EJ) X-Plate Offset Knob. Then, put together the (EJ) X-Adj. Screw
and Y-Block Assy. with the adjustable Cross Roller Way G2-45 on the other side and
use 3 M3X8 screws with springs to fix its position as in Figure 2-101.
10) Use 3 M3X6 set screws to adjust the sliding force of around 200~600g as in Figure
2-102.
Part III 2-34
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-102 Adjusting the sliding force by these 3 set screws
11) Use 2 M4X16 screws with springs to mount the (EJ) X-Adj. Screw onto the Y-Block
Assy. as in Figure 2-103
Figure 2-103
12) Insert the (EJ) Y-Adj. Screw with 2 springs mount onto the (EJUD) Ejector Base as in
Figure 2-104.
Figure 2-104
13) Use 2 M3X10 screws with springs to mount the Nut Assy. onto the (EJUD) Ejector
Base as in Figure 2-105.
Part III 2-35
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-105
14) Use 2 M4X16 screws with springs to mount the (EJ) Y-Adj. Screw onto the (EJUD)
Ejector Base as in Figure 2-106.
Figure 2-106
15) Use 6 M4X12 screws with springs to mount the Cross Roller Way 3-75 (inner) onto
the (EJ) Z-Base as in Figure 2-107.
Figure 2-107 Mount the CRW onto Z-Base
Figure 2-108 Check the sliding force
16) Use 6 M4X12 screws with springs to mount the Cross Roller Way 3-75 (outer) to the
(EJ) Z-Slide Plate. Use 3 M4X8 set screws to adjust the sliding force of around
65~85g as in Figure 2-108.
17) Install the up-down controlling cross roller ways as Figure 2-109. Use 2 M4X8 set
screws to adjust the sliding force of around 35~45g as in Figure 2-110.
Part III 2-36
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-109 Up/down control CRW assy
Figure 2-110 Adjust the set screw for the sliding force
18) Use 2 M4X12 screws with springs to mount the (EJ) Up/Down Wedge (Figure 2-111)
to the Cross Roller Way CRWM 3-50 (inner) as in Figure 2-112.
Figure 2-111 Up-down wedge
Figure 2-112
19) Insert the (EJ) Up/Down Sensor with Cylinder Module to the (EJ) Up/Down Wedge
and lock the 2 nuts as in Figure 2-113.
Figure 2-113 Lock the cylinder module
20) Use 4 M5X18 screws with spring to mount the (EJ) Z-Base to the (EJ) X-Adj. Screw
and Y-Block Assy.
Figure 2-114 Mounting the Z-Base
Part III 2-37
AD898 Overhaul Manual
Ch2 Module Assembly
21) Use 2 M5X10 screws with springs to mount the (EJ) Up/Down Sensor with Cylinder
Module to the (EJ) Z-Base as in Figure 2-115.
Figure 2-115 Lock the cylinder
22) Assembly the ejector pin (sliding base) module and mount to the Column Body from
Figure 2-116 to Figure 2-121. Adjust the cross roller ways sliding force to 18-25gf.
Put some grease on the shaft and around the O-ring.
Figure 2-116
Figure 2-117
Figure 2-118
Figure 2-119
Figure 2-120
Figure 2-121
23) Use 4 M3X8 screws with springs to mount the spacer (left), CAM (A), spacer (right),
lock nut, cam shaft, flag mount 270deg to the (EJ) Column Body as Figure 2-122.
Part III 2-38
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-122 Install the cam shaft
24) Use 2 M3X8 flat screws to mount the (EJ) Fork Sensor Mount onto the (EJ) Column
Body as in Figure 2-123.
Figure 2-123 Mount the sensor on the column body
25) Use 4 M3X6 screws with springs to mount the Cover to the (EJ) Column Body as in
Figure 2-124.
Figure 2-124 Mount the cover
Figure 2-125 Mount the Top Flange
26) Use 3 M3X6 screws with springs to mount (EJ) Top Flange onto the (EJ) Column
Body as in Figure 2-125.
27) Put on the (EJUD) MP Ejector Kit over the (EJ) Top Flange and use 2 M4X5 set
screws to fix it as in Figure 2-126.
Part III 2-39
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-126 Put on MP Ejector Kit
28) Use 4 M4X14 screws with springs to mount the (EJ) Column Body to (EJ) Z-Slide
Plate as in Figure 2-127 and Figure 2-128.
Figure 2-127
Figure 2-128 Mount the column body to Z-Slide Plate
29) Use 2 M3X5 set screws to mount the (EJ) Driven Pulley (AT3/40) to the Cam Shaft.
Figure 2-129 Mount the Driven Pulley
Part III 2-40
Figure 2-130
AD898 Overhaul Manual
Ch2 Module Assembly
30) Use 2 M4X12 screws with springs and 2 M4X6 flat screws to mount the (EJ) Motor
Mount (Servo) to the (EJ) Z-Slide Plate as in Figure 2-130.
31) Use 4 M4X14 screws with springs to mount the (EJSV) 8912 Electrical Assy. to the
(EJ) Motor Mount (Servo). Note: New module will equip with servo motor instead of
stepper motor as in Figure 2-131.
Figure 2-131 Mount the motor
32) Align the pulleys with timing belt so that they are parallel with each other.
33) Adjust the timing belt tension until the belt tension meter reading is from 230300Hz.(note: If you have no belt tension meter, you may use a cable tie round on the
motor body and pull it with 5 to 6 kg force and then tighten the screws).
34) Install all other ejector parts as Figure 2-132 and Figure 2-133.
Figure 2-132 Ejector table (1)
Figure 2-133 Ejector table (2)
Part III 2-41
AD898 Overhaul Manual
Ch2 Module Assembly
2.6
Wafer Table
2.6.1
Wafer Table Specification Check List
Item Description
Specification/requirement
XY Table Assy
Note AFF Grease for the LM Guide
1
X LM rail parallelism
10um
2
X LM guide preload
100-450gf (each)
3
X LM guide with loading
Initial sliding friction 1000-2000gf
Dynamics sliding friction 1000-1400gf
4
Y LM rail parallelism
10um
5
Y LM guide preload
100-400gf (each)
6
Y LM guide with loading
Initial sliding friction 1000-2000gf
Dynamics sliding friction 1200-1600gf
7
Check the linear encoder
Refer to manual
2.6.2
Result
Wafer Table Assembly
Tools and Equipment Preparation
1) Gram gauge
2) Feeler gauge
3) Torque gauge
4) Torque driver
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Install the LM guide onto Y-table base. Tighten all the screws with torque at 40kgfcm.
Be careful that the KB mark of the LM guide should face to the reference side.
3) Check the LM guide preload force should be within 100-450gf (each block) with
gram gauge.
Stopper
KB
Figure 2-134 Y table
4) Install the LM guide onto X table. Reminded that the LM guide without KB marks
should face the reference side. Tighten all the screws with torque at 40kg.
5) Check the preload force of the LM guides should be between 100-450gf.
6) Turn the X table upside down and then install the coil as shown in Figure 2-136.
7) Put the X table onto the LM guides of the Y table.
Part III 2-42
AD898 Overhaul Manual
Ch2 Module Assembly
8) Install two magnet bars into the Y table as shown in Figure 2-137. Tighten the screws
with torque at 40kg. The gap between the coil and magnet bar should between 1.11.4mm
9) Check the sliding force of LM guide on Y table. The specification should be within
1200gf-1600gf.
KB
Figure 2-135 X table
Wafer table left coil
Reference side
Wafer table right coil
Figure 2-136 Y direction linear motor coil
Coil
X table
Magnet bar
Figure 2-137 Y direction magnet bars
Part III 2-43
AD898 Overhaul Manual
Ch2 Module Assembly
10) Turn expander table upside down and install the coil onto the table.
11) Install expander table onto the LM guides of the X table and put the magnet bar into
X table. The gap between the coil and magnet bar should between 1.1-1.4mm.
12) Check the force of the X table with gram gauge. The specification is within the range
1000gf-1400gf.
Expander table
Magnet bar
Figure 2-138 X direction magnet bar
13) Install the linear encoders on both X and Y table. The gap between the encoder and
the electronic ruler should be equal to 0.8mm. Adjust the linear encoder mount such
that green light must observe through the whole traveling distance and no blinking
should be seen.
Linear encoder
Electronic ruler
Figure 2-139 Linear encoder and golden ruler
14) Connect all the wires and check the sensors flag should cut the sensor exactly at the
middle of the fork sensor.
Part III 2-44
AD898 Overhaul Manual
Ch2 Module Assembly
2.7
Wafer Ring Assembly (8 Wafer Ring)
2.7.1
Wafer Ring Specifications Check List
Item
1
2
3
2.7.2
Description
Ring rotation timing belt
Theta motor timing belt tension
Rotational sliding force
Specification/requirement
110-150Hz (by belt tension meter)
250-400Hz (by belt tension meter)
500-1000gf
Result
Wafer Ring Assembly
Tools or Equipment Preparation
1) Gram gauge 100-1000gfcm
2) Belt tension meter
3) Grease
4) Loctite# 222
Assembly Procedures
1) Clean the (WE) 8 rotational ring as in Figure 2-140 and Figure 2-141.
2) Put on the bearing onto the bottom part of the rotational ring and make sure the
bearing direction such that the balls of the bearing can be seen on bottom of the
rotational ring as in Figure 2-142 and Figure 2-143.
Figure 2-140 (WE) 8 Rotational Ring Top View
Figure 2-141 (WE) 8 Rotational Ring Bottom View
Figure 2-143 Balls of the Bearing
Figure 2-142 Bearing KC-110XPO
3) Put the (WE) bearing clamp plate 2 on the bottom of the rotational ring as in Figure
2-144 and tighten the 16 M3X4 flat screws with Loctite# 222 as in Figure 2-145.
Part III 2-45
AD898 Overhaul Manual
Ch2 Module Assembly
M3X4 Flat Screw
(WE) Bearing
Clamp Plate 2
Ring Home
Sensor Flag
Figure 2-144 Put on the (WE) Bearing Clamp Plate2
Figure 2-145 Tighten the 12 M3X4 Flat Screws
4) Put the rotational ring onto the expander frame as in Figure 2-146 and Figure 2-147.
Make sure the timing belt is already attached to the rotational ring.
Figure 2-146
Figure 2-147 Put on the Rotational Ring
5) Put on the 12 (WE) bearing mount plates to fix the rotational ring by using M3X4 flat
screws (2 for each plate) with Loctite# 222 to tighten it as in Figure 2-148 and Figure
2-149.
6) Check the rotational sliding force using the gram gauge if it is within 500 to 1000gf as
in Figure 2-150.
Figure 2-148 Put on the bearing mount plates
Figure 2-149 Put on the M3X4 Flat Screws
Figure 2-150 Check the Rotational Sliding Force
Part III 2-46
AD898 Overhaul Manual
Ch2 Module Assembly
7) Mount the (WE) theta motor assembly and the (WE) idler bracket on the expander
frame as in Figure 2-151.
8) Adjust the idler bracket position until the timing belt tension is within 110-150Hz as
shown in Figure 2-152.
9) Install the theta motor timing belt and then adjust the belt tension so that it can be
within the range 250-400Hz as in Figure 2-153.
Figure 2-151 Mount the Theta Motor Assy and the Idler
Bracket
Figure 2-152 Adjust the Timing Belt Tension (Large)
Figure 2-154 Finished Wafer Ring Assembly
Figure 2-153 Adjust the Timing Belt Tension (Small)
Part III 2-47
AD898 Overhaul Manual
Ch2 Module Assembly
2.8
Wafer Expander Assembly
2.8.1
Wafer Expander Specifications Check List
Item Description
8 Inch Wafer Expander
1
Timing belt tension
Specification/requirement
<100um for 4 leadscrew location
Top plate leveling
Result
165-195Hz
8 inches wafer expander assembly procedures
2.8.2
Tools or Equipment Preparation
1) Belt tension meter
2) Loctite #222
Assembly procedures
1. Install all the pulleys and timing belt on the wafer expander ring base as in Figure 2-155.
Note: You should add some Loctite #222 onto the pulley screw nuts.
2. Check the timing belt tension with the belt tension meter and adjust the tension by turning
the tensioner shaft shown as in Figure 2-156 to Figure 2-158.
Loosen
the lock
screw first
Figure 2-155 Put on the pulleys and timing belt
Then, turn
this screw
to adjust the
tensioner
shaft
Figure 2-156
Figure 2-157 Adjust the tension (1)
Figure 2-158 Adjust the tension (2)
3. Install the top plate onto the 8 bottom disk as shown in Figure 2-159. Make sure the ring
open/close sensor flag sit in the slot on the bottom disk as in Figure 2-160.
Part III 2-48
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-159 Put on the top plate
Figure 2-160 Align the ring open/close sensor flag slot
4. Put on the four leadscrew assembly onto the top plate and screw a little bit onto the
pulleys as shown in Figure 2-161 and Figure 2-162.
Figure 2-161 Put on the leadscrew assy
Figure 2-162 Screw in a little bit of the leadscrew assy
5. Put on the leadscrew cover over the leadscrew assembly and tighten a little bit on the 2
M4X5 flat screw as shown in Figure 2-163. Use a screw driver to adjust the height of the
top plate by turning the leadscrew such that the level on the top plate is the same on the
ring as shown from Figure 2-164 to Figure 2-166.
Figure 2-163 Hand tighten the leadscrew assy
Figure 2-164 Adjust the top plate level
Figure 2-165 Check the level (1)
Figure 2-166 Check the level (2)
6. Put back the top cover of the wafer expander. Align on the 3 guide pins at the back as
shown in Figure 2-167 and Figure 2-168. Tighten the eight M3X8 lock screws (4 on left
and 4 on right) with spring and flat washers as shown in Figure 2-169 and Figure 2-170.
Part III 2-49
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-167 Back of the wafer expander
Figure 2-168 Put on the top cover
Figure 2-170 4 lock screws on right
Figure 2-169 4 lock screws on left
Figure 2-171 8 Wafer Expander
Part III 2-50
AD898 Overhaul Manual
Ch2 Module Assembly
2.9
Leadframe Loader
2.9.1
Leadframe Loader Specification Check List
Item Description
Y Pick Arm Assembly
Note: AFF
1
Pick Arm LM Guide preload
2
Pick Arm LM Guide with loading
3
Y Arm Timing belt
4
Check Solenoid Valve Function
5
Check Sensor function
2.9.2
Specification/requirement Result
200-300gf (each)
800-1500gf
80-120Hz
Visual Check
Visual Check
Leadframe Loader Assembly
Tools and Equipment Preparation
1) Gram gauge
2) Torque gauge
3) Torque driver
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) Assemble A/C bearing as in Figure 2-172.
3) Install the motor and A/C bearing onto the base as shown in Figure 2-173.
4) Install the timing belt. The timing belt and the pulley should be parallel. The timing
belt tension should within 80-120Hz.
Figure 2-172 Install the Motor and A/C Bearing
Figure 2-173
Figure 2-174 Install the Timing Belt and check the tension
Part III 2-51
AD898 Overhaul Manual
Ch2 Module Assembly
5) Check the preload force of LM guide which between 200-300gf.
6) Add grease AFF onto the LM guide.
7) Install the LM guide onto Y arm and tighten the screw with torque equal to 40kgfcm
as Figure 2-175.
Figure 2-175 Checking the sliding force of the LM Guide without loading
8) Install Y arm onto the base mount. Check force of the LM guide with gram gauge.
The force should between 800-1500gf as in Figure 2-176.
Use gram gauge
to check the force
Figure 2-176 Checking the sliding force of the LM Guide with loading
9) Connect the Y arm with the timing belt and the motor. Make sure all the parts can
move smoothly without missing step.
10) Assemble all the parts shown in Figure 2-177. All the sucking heads should in the
same level and no air leakage.
Sucking heads
Figure 2-177
11) Install the lead frame and paper sucker onto Y arm.
12) Connect all the wires, sensors and air pipe.
Part III 2-52
AD898 Overhaul Manual
Ch2 Module Assembly
Figure 2-178
Figure 2-179
Part III 2-53
AD898 Overhaul Manual
Ch2 Module Assembly
2.10 Stack Loader
Stack Loader Specifications Check List
Item Description
Stack Loader Assembly
1
LM Guide Preload
2
LM Guide with loading
3
Leadscrew preload
4
Leadscrew with loading
5
Timing belt tension
Specification/requirement
Result
50-100gf (each)
100-250gf
50-250gf, 150gfcm
100-400gfcm, 150gfcm
250-350Hz (by belt tension meter)
Tools and Equipment Preparation
1) Gram gauge
2) Tension meter
3) Torque gauge
4) Torque driver
Assembly Procedures
1) Clean all mechanical parts with alcohol and dustless paper or clothes.
2) For the stack loader elevator, check the preload torque of the leadscrew with a torque
gauge. The specification is between 50-250gfcm while variation less than 150gfcm.
3) Assemble the A/C bearing and add NSK grease into the leadscrew as shown in Figure
2-180.
A/C bearing
Figure 2-180 Install the A/C Bearing and Leadscrew
4)
5)
6)
7)
Check the LM guide preload force with gram gauge. The specification is 50-100gf.
Install the LM guide and tight all screws with torque 20kgfcm.
Install the L/F plate mount onto the LM guide.
Check the torque of leadscrew in both clockwise and anti-clockwise direction that
should be between 100-400kgfcm with variation less than 150gfcm.
8) Assemble all parts as shown in Figure 2-181.
Part III 2-54
AD898 Overhaul Manual
Ch2 Module Assembly
L/F plate mount
Stopper mount
Figure 2-181 Put on the L/F Plate Mount
9) Assemble part A and motor as shown in Figure 2-182 to Figure 2-184. Check the
tension of the timing belt should within 250-350Hz.
Part A
Figure 2-182
Motor
Figure 2-183
Figure 2-184 Mount the motor
10) Assemble Y-rack, Y L/F rear guide onto Y-rear guide base to form Y-rear guide.
11) Install Y-rear guide into the base as Figure 2-185.
Part III 2-55
AD898 Overhaul Manual
Ch2 Module Assembly
Y rear guide
Y L/F rear guide
Figure 2-185
12) Assemble Y rack, Y L/F front guide onto Y-front guide base to form Y-front guide.
13) Install Y-front into the base. Make sure the gears of rear guide and front guide work
smoothly as Figure 2-186.
Y L/F front guide
Y front guide
Figure 2-186
14) Assemble X-rack and X L/F left guide onto X-left guide base to form X-left guide.
15) Install X-left guide onto Y-front guide as Figure 2-187.
X left guide
X L/F left guide
Figure 2-187
Part III 2-56
AD898 Overhaul Manual
Ch2 Module Assembly
16) Assemble X-rack and X L/F right guide onto X right guide base to form X-right guide.
17) Install X-right guide onto X-left guide as Figure 2-188. Make sure the gears for X left
guide and X right guide work smoothly and the height of six platform guide should be
the same.
X L/F right guide
X right guide
Figure 2-188
18) Install part A onto X right guide as in Figure 2-189.
Part A
Figure 2-189
19) Figure 2-190 shown the finished module.
Figure 2-190 Finished Module
Part III 2-57
AD898 Overhaul Manual
Ch3 Tool List
Chapter 3
Item
ASM Part No.
Tool List
Description
Photo
Qty
26-E08842
Locking tool (ejector
eccentric shaft clamp)
26-E08868
Torque gauge adaptor
(ID10)
26-E08869
Torque gauge adaptor
(ID12)
26-E08870
Torque gauge adaptor (ID8)
53-00208
62-10002
Micro-X Calibration Kit
PWM9
Interface Adapter
(11uA)
Interface Adapter (TTL)
Interface Adapter
(1Vss)
BNC Cables
12-Pin Connecting
Cable
Gram gauge 25-250gf
62-10003
Feeler Gauge - Metric
62-10004
Gram gauge 5-50gf
Part III 3-1
AD898 Overhaul Manual
Ch3 Tool List
93-83000
BP Allen key (metric straight)
10
S26-58902
Gauge Block
11
S26-58903
Clamp Bar
12
SPP-00081
Torque Gauge 1200gfcm
13
SPP-00082
Torque Wrench 120 kgfcm
14
SPP-00083
Torque driver 12 kgfcm
15
SPP-00084
Torque driver 3 kgfcm
16
SPP-00085
Torque driver 50 kgfcm
17
SPP-00087
Dial indicator 513-1011(8mm stem)
18
SPP-00088
Dial indicator (1mm and
range 1mm)
Part III 3-2
AD898 Overhaul Manual
Ch3 Tool List
19
SPP-00089
Dial Height Gauge 192-130
20
SPP-00091
Gram gauge 100-1000gf
21
SPP-00092
Gram gauge 10-100gf
22
SPP-00094
Gram gauge 50-500gf
23
SPP-00096
Holding bar 900321,100mm
long
24
SPP-00097
Magnetic stand ( Fine
adjustment )
25
SPP-00098
Push and push gauge 10KG
26
SPP-00100
Swivel Clamp 900321
Part III 3-3
AD898 Overhaul Manual
Ch3 Tool List
27
SPP-00258
Belt tension meter Vendor
Name: Clavis Model no. :
Belt tension meter type 5
28
049-03001
Oil Stone Fine 25MM Flat
29
NO ASM part
no. and
customer can
buy this at the
market
Ring Piler
30
NO ASM part
no. and
customer can
buy this at the
market
G Clamp (around 80 mm)
31
NO ASM part
no. and
customer can
buy this at the
market
Leveling table
32
NO ASM part
no. and
customer can
buy this at the
market
Oscilloscope
SPP-00295
SPP-00296
SPP-00297
SPP-00298
SPP-00299
SPP-00300
SPP-00301
Part III 3-4
Optional Items
6.0MM HEX BIT USE IN
TORQUE DRIVER
1.5MM HEX BIT USE IN
TORQUE DRIVER
2.0MM HEX BIT USE IN
TORQUE DRIVER
2.5MM HEX BIT USE IN
TORQUE DRIVER
3.0MM HEX BIT USE IN
TORQUE DRIVER
4.0MM HEX BIT USE IN
TORQUE DRIVER
5.0MM HEX BIT USE IN
TORQUE DRIVER
1
1
1
1
1
1
1
AD898 Overhaul Manual
Ch3 Tool List
SPP-00302
7MM NUT SOCKET USE IN
WRENCH
SPP-00303
8MM NUT SOCKET USE IN
WRENCH
10
SPP-00304
9MM NUT SOCKET USE IN
WRENCH
11
SPP-00305
10.0MM NUT SOCKET USE
IN WRENCH
12
SPP-00306
11MM NUT SOCKET USE
IN WRENCH
13
SPP-00307
3.0MM SOCKET USE IN
TORQUE WRENCH
14
SPP-00308
6.0MM SOCKET USE IN
TORQUE WRENCH
15
SPP-00309
4.0MM SOCKET USE IN
TORQUE WRENCH
16
SPP-00310
5.0MM SOCKET USE IN
TORQUE WRENCH
17
SPP-00311
7.0MM SOCKET USE IN
TORQUE WRENCH
Part III 3-5
AD898 Overhaul Manual
CH4-Grease and Lubricant
Chapter 4
Name
Grease and Lubricant
ASM
P/N
Remark
Usage
Qty
NSK grease PS 2, Light duty
00-50019
Ballscrew, leadscrew
80g
NSK grease LG2, Clean Room
00-00145
Ballscrew, leadscrew
80g
Dunwell EP-2
(high temp, lithium soap base,
multi- purpose)
00-50020
Bearing , cross
roller(slider)
14 OZ
00-50022
Specially for die
bonder W/H Table
4" X 8"
6" X 6"
8" X 8"
1L
00-00144
LM guide
70g
00-00275
LM guide
400g
00-50023
Bond Head X, cross
roller way, bearing
1Kg
JOJOBA oil
(filed test with good anti
friction property on lead-screw
assy.)
THK AFF grease, Clean Room
Base Oil: High-grade
Synthetic Oil
Consistency Enhancer:
Lithium-based
THK AFB grease
Base Oil: Refined Mineral Oil
Consistency Enhancer:
Lithium-based
Kluber Staburags Grease
NBU12/300KP
Part III 4-1
AD898 Overhaul Manual
Ch4 Grease and Lubricant
4.1
Tools for Preventive Maintenance
Part III 4-2
Name
P/N
Usage
THK grease
gun unit
00-00146
For ballscrew,
LM guide slider
Syringe
Nil
For LM guide
Alcohol
Nil
For cleaning
Dustless / lintfree paper
Nil
For cleaning
Photo
AD898 Overhaul Manual
Ch5 Loctite and Where to Use
Chapter 5
Loctite
222
Appearance
Purple liquid
Cure
Anaerobic
Usage
Threadlocking. Particularly
suitable for applications such as
adjustment of set screws, small
diameter or long engagement
length fasteners, where easy
disassembly is required without
shearing the screw. Screws up
to diameters.
243
Blue liquid
Anaerobic
406
Transparent
liquid
Humidity (Although
full functional
strength is
developed in a
relatively short time,
curing continues for
at least 24 hours
before full
chemical/solvent
resistance is
developed.)
Threadlocking. Particularly
suitable for applications on less
active substrates such as
stainless steel and plated
surfaces, which prevents
loosening and leakage from
shock and vibration. While
disassembly with hand tools is
required for servicing. Screws
up to diameters.
Bonding. Designed for bonding
of plastics and elastomeric
materials where very fast
fixturing is required.
409
Clear to
slightly
cloudy gel
Humidity (Although
full functional
strength is
developed in a
relatively short time,
curing continues for
at least 24 hours
before full
chemical/solvent
resistance is
developed.)
Part III 5-2
Photo
Loctite and Where to Use
Bonding. Suitable for plastics,
rubbers and metals. It prevents
adhesive flow even on vertical
surfaces.
AD898 Overhaul Manual
CH5-Grease and Lubricant
498
Transparent
liquid
Humidity (Although
full functional
strength is
developed in a
relatively short time,
curing continues for
at least 24 hours
before full
chemical/solvent
resistance is
developed.)
Bonding. Designed for bonding
of rubbers, plastics and metals
where heat resistance is
required.
609
Green liquid
Anaerobic
Retaining. Designed for the
bonding of cylindrical fitting
parts and prevents loosening
and leakage from shock and
vibration.
1401C
Red
Anaerobic
Sealing. Synthetic-resin
locking agents that prevent
screws and bolts from
loosening, leaking, or
rusting.
Part III 5-3
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
Chapter 6
Standard LM Guide/Cross
Roller Way Assembly
The following parts would demonstrate the overhaul procedure of our standard parts. Those
parts would include:
Cross roller way
LM guide
A/C bearing
Ball screw
Timing belt
Coupling
6.1
Cross Roller Way
Advantage:
Lubrication:
Cross roller way can run smoothly in very high accuracy
Kluber Lubrication
Cross roller way
End screw
Ball cage
Figure 6-1
Procedures:
1. Clean the mechanical parts with alcohol or dustless paper.
2. Add grease onto the cross roller way.
3. Usually one pair of cross roller way can be divided into two parts: adjustable and fix
one. Install the fix part onto the module and tighten all the screw from center to the
two sides.
4. Install the adjustable part on to the module.
Part III 6-2
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
Fix side of cross
roller way
Adjustable side of
cross roller way
Figure 6-2
No set screw
on the fix side
Set screw on the
adjustable side
Figure 6-3
5. Loosen the end screw of either side.
6. Keep moving the module and put the ball cage inside the gap between the two cross
roller way as in Figure 6-4.
Part III 6-3
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
7. Put back the end screw into the cross roller way.
End screw
Figure 6-4
8. Adjust the set screw at the adjustable side of the cross roller way until the whole
module move smoothly and no bouncing during the movement. Also, the force should
be within specification. (Different modules have different specification, please refer to
corresponding chapter).
Part III 6-4
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
6.2
LM Guide
Advantage:
High efficiency, high accuracy, low cost
Lubrication:
THK AFB grease or THK AFF grease (for clean room). The grease being used
must be same as the original one and a thin layer of Grease should be added
onto the surface of LM guide to prevent rusting.
Reference mark:
A KB mark would be shown at the reference side of the LM guide.
Procedures:
1. Check the part number of the LM guide and roller if they are the same. The mark on
the rollers should be in the same direction.
2. Install the roller onto the LM guide and tighten the screws. The sequence of
tightening the screw should follow the figure shown below.
Figure 6-5
3. The torque (kgf.cm) of the screw should follow the below table.
M2
5
M2.5/M2.6 M3
12
20
M4
42
M5
90
M6
140
M8
310
4. Clean the LM guide with alcohol and cloth.
5. Use G clamp to fix the LM guide close to the reference side of the module. Tighten all
the screws from center to two sides.
6. If there is no reference side on the module, use the KB side as reference. Check the
parallelism of the LM guide with dial gauge and specification should be within 10um
as Figure 6-6.
7. Check the preload force of the roller and let this value be A.
Part III 6-5
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
Testing point
Reference side
Figure 6-6 Checking Parallelism of the LM Guide
8. Put the module onto the rollers but not tighten all the screws.
9. Check the loaded force of the LM guide and let this value be B. The vale of B should
be smaller than A+100gf.cm.
10. Also check the loaded force in reverse direction and let this value be C. The value of
C should be smaller than A+100gf.cm.
Maximum value
Minimum value
Figure 6-7 Checking the loaded sliding force of the LM Guide
Remarks:
Part III 6-6
The parallelism of the LM guide for normal purpose is 10um.
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
6.3
A/C Bearing
Lubrication:
Kluber lubrication
Procedures:
1. Clean the A/C bearing with alcohol.
2. Add Kluber lubrication into the bearing.
3. There is a little circle mark located both in the inner bearing and the outer bearing.
Rotate the bearing such that the two circle marks stand in the same line as Figure 6-8.
Figure 6-8 Locate the marks on the bearings
4.
Put the two bearing together as Figure 6-9 so that a V mark would be form on the
surface of the bearing. Usually the arrow would point to the shaft or nut.
Figure 6-9 Position the bearings to form a similar V mark
Part III 6-7
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
5.
6.
7.
8.
9.
Install the bearing into the module hole.
Install a lock nut into the bearing and measure the torque. Let the value be A.
Tighten the lock nut with a specific torque driver and the torque should be smaller than
A+80gf.cm.
Install the E ring into the bearing and the torque should have no change.
The outer bearing was locked and there should be a gap between the bearing and module.
So tighten the bearing cover screw.
Remarks: If there is a large change of torque after tightening the bearing cover screw, may be
The module bearing hole is not perpendicular with the bearing.
Usually, four screws are used to lock the bearing cover. The screws should not be
tighten in one time but at least to tighten the screws in three times.
The module hole is not match with the bearing.
Part III 6-8
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
6.4
Ballscrew
Advantage:
High efficiency, less noise
Lubrication:
NSK PS2 or LG2 grease
Procedures:
1. Check the torque of the ballscrew before adding grease. The torque should not exceed
30gf.cm and variation should be constant.
2. Add grease with grease gun using NSK PS2 or LG2 grease and then run the screw for 5
minutes as Figure 6-11.
Figure 6-10
Figure 6-11
3.
4.
5.
Wait for 10 minutes after dry run of ballscrew to prevent the high temperature may
affect the operation of ballscrew.
Check the torque and torque variation of ballscrew for full traveling distance. As the
ballscrew turns, there would be a maximum value and a minimum value for each pitch
such as (max1, min1) for the first pitch and (max2,min2) for the second pitch. Take the
maximum value only for example the torque range would be max1 to max2 gf.cm.
Check the torque variation by comparing the torque difference for every pitch. For
example, first pitch have max1 min1 = 80, second pitch have max2 max2 = 100.
Then 100gf.cm would be the torque variation.
Part III 6-9
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
Torque value
Figure 6-12
6.
Assemble the ballscrew and the A/C bearing and the module. Do not tighten all the
screw but measure the torque first.
7. Measure the preload torque of ballscrew and A/C bearing and let the values be Tp and
Ta.
8. Measure the force of the module and ballscrew traveling distance. The value would be F
and L respectively.
9. The total torque would be T=Tp+Ta+F*L/(2*3.14)
10. After tightening all the screw, the torque should be smaller than T+100gf.cm.
Part III 6-10
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
6.5
Timing Belt
Things to be notice during installation of timing belt:
1. The timing gear should be parallel to each other and not tilted.
2. The timing tension should not be too tight or too loose.
3. The size of timing belt gear is matched to each other such that the size of gears cannot
be changed.
4. The screw should be tightened well.
5. During the operation of timing belt, no noise should be made and movement should be
very smooth.
Figure 6-13 Tension Meter
The timing belt gear is parallel with
each other and the tension of timing
belt is not too tight or too loose.
Figure 6-14 Checking the Timing Belt Position
Part III 6-11
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
6.6
Coupling
Advantage:
Constant angular speed, oil resistance, anti-corrosive
Application:
vibration.
Connect 2 shafts which may not be parallel, transmitting the power, reduce the
Marking:
DKN20/42-6.35H7-8H7 (DKN20:20 Rated torque is 2Nm; 42:Length of
coupling; 6.35H7-8H7:Hole size and tolerance.
Procedures:
1. Incoming material inspection: no scratch on surface, no bend, no dirt, gap between pitch
is even.
2. Hole size of the coupling should match with the shaft. 2 shafts should not touch each
other.
3. When assembly, the 2 shafts should in the same center line, when loosen the locking
screws, the coupling can move freely. When tighten the locking screw on one side, while
turning the shaft on the other side, the coupling should not turn.
Gap should be even
Locking screws
Figure 6-15 Coupling
4. The shafts length inside the coupling should exceed the locking screw area toward
inward.
5. Locking screws will come with the coupling, tightening force should follow Screw
Usages and Requirements (screws should add Loctite#222), follow special instruction on
special requirement.
6. Follow instruction to add RED Loctite to mark the screws have already tightened.
Remarks: Before assembly, dont extend, compress, bend the coupling with hands to reduce
its accuracy.
Part III 6-12
AD898 Overhaul Manual
Ch6 Standard LM Guide / Cross Roller Way Assembly
Torque Driver
Red Loctite
Figure 6-16
Part III 6-13
AD898 Overhaul Manual
Ch7 Voice Coil & Linear Motor Resistance
Chapter 7
Picture
Voice Coil & Linear Motor
Resistance
Part No.
01-20343
Description
(Bond Head Table) Micro-X Coil-4
(MAG6) Assy. (red and white cables with
normal value 7.9~8.0 )
Resistance ( )
7.15~9.96
01-25178
(Bond Arm) BF VCM Module (for PF2
bond arm)
111
S02-17117
(Bond Optic) 8912 Y Motor Assy. (red
and white cables with normal value
1.2~1.3 )
1.05~1.89
S01-17906
Indexer Linear Motor Coil Assy. (pairs
with red and white, red and black, white
and black with normal value 1.1 )
0.9~1.2
S01-17752
(Wafer Table) Linear Motor
Male: 1-2
c f
2-3
d e
1-3
(Work Holder) Clamp Coil Assy. (red and
white cables with normal value 6.2 )
10.2 for X
20.3 for Y
01-19158
6.50.3
Part III 7-1
AD898 Overhaul Manual
Ch8 Screw Usages and Requirements
Chapter 8
Item
Description
Screw Usages and
Requirements
Screw Type Washer Spacer
Loctite
222
(301-00110-1)
Cross Roller or LM
Guide
Coupling, Pulley,
Clamp Rring, Ball
Screw, Lead
Screw, Nut Mount,
Motor
M2
M2.5(6)
ball
head
12
20
M4
42
M5
90
M6
140
M8
310
M2
M2.5(6)
ball
head
M3
18
M4
40
M5
80
M6
130
X
ALL
ball
head
Heating Area
All Screw
ball
head
flat
head
ball
head
flat
head
ball
head
All Screw
2 mm Aluminium All Screw
Board
All Screw
M2
M2.5
General
specification
General
specX0.7
M4
14
M5
29
M6
49
M8
122
M2.5
Depend on
the design
Use OKS240
4
6
other
screw
M3
M2
18
Sensor Flag ,
Cover
Non Metal
The screw
(LM guide should be in
the hold
rail not
center
required, LM
guide block
need to add)�
10
M3
4-40
Tightening
Loctite
Torque
1401C
Remark
(kgf.cm) (SS-00273)
2
4
M3
M4
14
Part III 8-1
AD898 Overhaul Manual
Ch7 Screw Usages and Requirements
Item
Description
Screw Type Washer Spacer
Loctite
222
(301-00110-1)
General case
Tightening
Loctite
Torque
1401C
Remark
(kgf.cm) (SS-00273)
M5
29
M6
49
M8
122
M2
M2.5(6)
ball
head
M3
13
M4
28
M5
60
M6
94
M8
Tighten with
appropriate
torque
M10
M12
M14
M16
M20
M2
M2.5/M2.6
flat
head
M3
M4
(Cover
screw no
need to
add�
M5
6-32
: Need to add loctite
10
18
35
All Set Screw
4-40
ball
head
13
X : No need to add
25
* : Depended on requirement
Note:
1) Non metal screw, no need to add Loctite.
2) Install with specific requirement.
3) NON metal including non metal thread and pressed non metal.
4) General screw selection: Same part and location use same type of screws. The thread
length of screw is larger the twice of outer diameter of the screws and the thread cannot
over more than two threads.
5) For Loctite 1401C, only for specific requirement.
~~~ End of Part III ~~~
Part III 8-2
You might also like
- Creality Falcon2 User ManualDocument24 pagesCreality Falcon2 User ManualSteven BaynesNo ratings yet
- OMRON PLC程式編輯與軟體教學CS1 PLC & CX-PROGRAMMER (Ver 5.0)Document35 pagesOMRON PLC程式編輯與軟體教學CS1 PLC & CX-PROGRAMMER (Ver 5.0)STM WorksNo ratings yet
- FSP271-5F01 - DIA Service ManualDocument3 pagesFSP271-5F01 - DIA Service Manualasghar1234No ratings yet
- 第2章 乐高齿轮Document14 pages第2章 乐高齿轮Jun MengNo ratings yet
- 行動衛星通訊Mobile Satellite CommunicationDocument31 pages行動衛星通訊Mobile Satellite CommunicationSTM WorksNo ratings yet
- API617压缩机标准Document82 pagesAPI617压缩机标准黃冠旗No ratings yet
- ZXR10-8900系列 (V2 8 01C) 万兆路由交换机用户手册 (IPv6分册)Document92 pagesZXR10-8900系列 (V2 8 01C) 万兆路由交换机用户手册 (IPv6分册)Paulo TianNo ratings yet
- 伺服教材Document11 pages伺服教材zhulibingNo ratings yet
- Inverter TT100 0213Document28 pagesInverter TT100 0213MarioNo ratings yet
- 台達電梯一體機 Ied G系列使用手冊Document137 pages台達電梯一體機 Ied G系列使用手冊siegfriedNo ratings yet
- ATS11-A成品使用说明书 20150121Document5 pagesATS11-A成品使用说明书 20150121mikiNo ratings yet
- Datasheet 8Document69 pagesDatasheet 8conti51No ratings yet
- Ua32d4003b - U57g - U56hDocument55 pagesUa32d4003b - U57g - U56hAntonioCésarUtreraNo ratings yet
- 軟起動Document60 pages軟起動方包No ratings yet
- 3VA9908-0BB.. Undervolatge Release UVR, UVR (LNO), UNIDocument6 pages3VA9908-0BB.. Undervolatge Release UVR, UVR (LNO), UNIsabeerNo ratings yet
- AST8835简介Document6 pagesAST8835简介Jorch Ramirez EstradaNo ratings yet
- 課程:節省人力、提升效率的製程自動化 & 機器人控制器mrc01解決提案Document60 pages課程:節省人力、提升效率的製程自動化 & 機器人控制器mrc01解決提案check.chang3No ratings yet
- FN-LINK 3121系列模组AT指令集 - v1.07Document25 pagesFN-LINK 3121系列模组AT指令集 - v1.07MacTubesNo ratings yet
- 01蘑菇物联 空压车间云联控方案Document14 pages01蘑菇物联 空压车间云联控方案bruce xuNo ratings yet
- Fn Link 3121n h Plc模组软件开发指南 - v1.01cnDocument17 pagesFn Link 3121n h Plc模组软件开发指南 - v1.01cnMacTubesNo ratings yet
- TIA-920.130-A 2011 的翻譯版本Document94 pagesTIA-920.130-A 2011 的翻譯版本點潔No ratings yet
- Ge Epm5500p ManualDocument156 pagesGe Epm5500p ManualSek TionoNo ratings yet
- M C 25 Và 26 (NSX Diamond Power)Document1 pageM C 25 Và 26 (NSX Diamond Power)Erick100% (1)
- 1 9# DR6000分光光度计中文操作手册 PDFDocument144 pages1 9# DR6000分光光度计中文操作手册 PDFscribd birdNo ratings yet
- 01倍福王涛Document45 pages01倍福王涛back1949No ratings yet
- LR Mate 200id Mechanical Unit Operator ManualDocument108 pagesLR Mate 200id Mechanical Unit Operator Manualzhaodong.liangNo ratings yet
- WS9002 WinsemiDocument9 pagesWS9002 WinsemiHiếu Khải Bạch MaiNo ratings yet
- BA VBL1000 02 19080 V4out HK 1Document24 pagesBA VBL1000 02 19080 V4out HK 1Koon Chin LawNo ratings yet
- STM32F4 EMWIN開發手冊Document25 pagesSTM32F4 EMWIN開發手冊lawhun0083No ratings yet
- Jckzc 58 水内冷发电机绝缘测试仪说明书 (可选档位)Document13 pagesJckzc 58 水内冷发电机绝缘测试仪说明书 (可选档位)Slobodan Savic0% (1)
- PB840使用说明书Document438 pagesPB840使用说明书shdiahNo ratings yet
- 三一集团品类分工表xlsxDocument52 pages三一集团品类分工表xlsxzxy320dNo ratings yet
- Adam (5510M) (5510e) (5510 TCP) (5510e TCP)Document15 pagesAdam (5510M) (5510e) (5510 TCP) (5510e TCP)brctlnNo ratings yet
- CAN600 ZH-CHSDocument102 pagesCAN600 ZH-CHStoufikNo ratings yet
- 工控自动化行业深度报告Document58 pages工控自动化行业深度报告莊智豪No ratings yet
- 107 Chapter 2 IC製程技術Document32 pages107 Chapter 2 IC製程技術huntercherry kechenNo ratings yet
- E-13 Final Drawing of Ups PDFDocument10 pagesE-13 Final Drawing of Ups PDFvikingNo ratings yet
- 东芝 2508A 3008A 3508A 4508A 5008A 便携手册Document61 pages东芝 2508A 3008A 3508A 4508A 5008A 便携手册Long HuulongNo ratings yet
- S204-8-2020 Operator's Manual (Chinese) PDFDocument105 pagesS204-8-2020 Operator's Manual (Chinese) PDFDiego Castañeda SantaNo ratings yet
- FN-LINK 3121系列模组软件开发指南 - v1.03Document16 pagesFN-LINK 3121系列模组软件开发指南 - v1.03MacTubesNo ratings yet
- 光電半導體元件導論期末報告Document6 pages光電半導體元件導論期末報告max hsuNo ratings yet
- 系統分析與設計 System Analysis and DesignDocument32 pages系統分析與設計 System Analysis and DesignSTM WorksNo ratings yet
- Ipc Tm 650 Cn中文 2023 - 测试方法扫描版Document10 pagesIpc Tm 650 Cn中文 2023 - 测试方法扫描版cdmingNo ratings yet
- 3931000248A6 Spec Undate 2020.5.7 - cgnv5Document25 pages3931000248A6 Spec Undate 2020.5.7 - cgnv5CarlosNo ratings yet
- Distributors ListDocument4 pagesDistributors Listnvkneelima90No ratings yet
- 980303 TIMTOS'09競賽廠商得獎名單Document16 pages980303 TIMTOS'09競賽廠商得獎名單Don wizzyNo ratings yet
- SAE J1939协议分析指南Document14 pagesSAE J1939协议分析指南Ahmad Eka FauziNo ratings yet
- Motor Control Product Catalog ChinaDocument82 pagesMotor Control Product Catalog ChinaMuhammad AbizarNo ratings yet
- Power Press PDFDocument8 pagesPower Press PDFMitricaGheorgheNo ratings yet
- CANopen协议分析指南 PDFDocument17 pagesCANopen协议分析指南 PDF40818248No ratings yet
- Delta Ia-Asd Asda-A2 Um SC 20240111Document751 pagesDelta Ia-Asd Asda-A2 Um SC 20240111li58872024No ratings yet
- 混合毛巾绣的安装使用说明Document59 pages混合毛巾绣的安装使用说明Mohamed NadirNo ratings yet
- C2-1 NCS7000G2F产品白皮书-V1.0Document54 pagesC2-1 NCS7000G2F产品白皮书-V1.0尹实No ratings yet
- ML Manual For Direct Drive TW enDocument2 pagesML Manual For Direct Drive TW enJose Antonio Rojas BautistaNo ratings yet
- Ylsk 1140 CNC Camless Spring Forming MachineDocument26 pagesYlsk 1140 CNC Camless Spring Forming MachineMarcelo S. PereiraNo ratings yet
- Q66da-G CHNDocument184 pagesQ66da-G CHNJackam kamNo ratings yet
- 51659 Ctx Dnpa 數位網路廣播系統 使用手冊Document57 pages51659 Ctx Dnpa 數位網路廣播系統 使用手冊Nick WuNo ratings yet
- s7200 System Manual ZH-CHSDocument554 pagess7200 System Manual ZH-CHSAryo Prastyo AjiNo ratings yet
- MT 1820 Driver SopDocument11 pagesMT 1820 Driver Sop赵越No ratings yet
- 全自动麻将机故障与维修Document9 pages全自动麻将机故障与维修yinming2020No ratings yet
- AIR150Fi系列09 離合器、齒輪移位機構Document8 pagesAIR150Fi系列09 離合器、齒輪移位機構巧克力金沙No ratings yet
- Ib 0300044 CDocument322 pagesIb 0300044 CsangoldungNo ratings yet
- 112 4y 01 1Document8 pages112 4y 01 1Herman HuNo ratings yet
- 基于变刚度的机器人关节设计与控制研究 罗木林Document80 pages基于变刚度的机器人关节设计与控制研究 罗木林chaiwei032No ratings yet