You might also like
- PowerAcoustik Distributor PricesDocument5 pagesPowerAcoustik Distributor PricesMarv PascNo ratings yet
- UV-5R Charger PDFDocument1 pageUV-5R Charger PDFJozo Ćurčić100% (2)
- VENTILATIONDocument16 pagesVENTILATIONMwine Isaac NormanNo ratings yet
- Hse Plan Asl PDFDocument87 pagesHse Plan Asl PDFBudi Prasetyo100% (1)
- Leyland HA6ETI Service ManualDocument72 pagesLeyland HA6ETI Service ManualPolavarapu Sreedhar100% (4)
- The Color Purple NotesDocument9 pagesThe Color Purple NotesFreddy GaraboaNo ratings yet
- NMC SVMH Presentation 7Mar2012Final-2Document37 pagesNMC SVMH Presentation 7Mar2012Final-2dram408No ratings yet
- JVC Service Manual mxgt80 PDFDocument48 pagesJVC Service Manual mxgt80 PDFAlex GuerreroNo ratings yet
- SW Radio PDFDocument5 pagesSW Radio PDFAhmed BoubakerNo ratings yet
- Yorkville AM100 Service ManualDocument10 pagesYorkville AM100 Service Manualcaimanater100% (1)
- Cocoa-Value-Chain-Assessment-Pind FoundationDocument64 pagesCocoa-Value-Chain-Assessment-Pind FoundationAfaaqi Engineering LimitedNo ratings yet
- Gemini Sound X-2 Service ManualDocument24 pagesGemini Sound X-2 Service Manualbizzinifra5522No ratings yet
- Quint DC UPS ManualDocument9 pagesQuint DC UPS ManualZain Ahmed MalikNo ratings yet
- Assignment - Proposal Writting Assignment July 20Document2 pagesAssignment - Proposal Writting Assignment July 20Digital Era0% (1)
- Trafo Loss CalDocument3 pagesTrafo Loss Calashish sahaNo ratings yet
- Emergency Plan in Case of JailbreakDocument6 pagesEmergency Plan in Case of JailbreakChristianBaloaloa0% (1)
- IGBC - AP Practice Paper - 1Document38 pagesIGBC - AP Practice Paper - 1Anonymous Qm0zbNk50% (2)
- Service Manual Cobra 200GTL DX ENGDocument31 pagesService Manual Cobra 200GTL DX ENGBuzarin DanielNo ratings yet
- Service Manual RCI 6900F150 ENG PDFDocument41 pagesService Manual RCI 6900F150 ENG PDFRichardson Almeida0% (1)
- MA5002VZ SM 130446-1amplificator ManualDocument140 pagesMA5002VZ SM 130446-1amplificator Manualtiganiada100% (1)
- Metal Detector ReportDocument13 pagesMetal Detector ReportAnonymous ytZsBOVNo ratings yet
- SearchDocument9 pagesSearchMartin JimenezNo ratings yet
- DX 1227Document11 pagesDX 1227Marcos Daniel Muñoz ToledoNo ratings yet
- Active 3 Band Tone ControlDocument1 pageActive 3 Band Tone ControlAnonymous vKD3FG6RkNo ratings yet
- Voyager VB777 MosfetDocument1 pageVoyager VB777 MosfetLuis CarlosNo ratings yet
- Teac MC DX10 Service ManualDocument26 pagesTeac MC DX10 Service ManualVaishakNo ratings yet
- Alto A200.2 Power Amp Service ManualDocument25 pagesAlto A200.2 Power Amp Service ManualmundomusicalmeriaNo ratings yet
- Hi Fi AmplifierDocument16 pagesHi Fi AmplifierMiguel Mejía100% (1)
- Sony HCD Rv222 Ver 1.1Document86 pagesSony HCD Rv222 Ver 1.1Carlos Raul100% (2)
- Midas VeniceDocument46 pagesMidas Venicemirescualin100% (1)
- HC 14000 MH 9400 SCHDocument1 pageHC 14000 MH 9400 SCHGustavo de Vargas DiasNo ratings yet
- ELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFDocument3 pagesELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFChornosDjajal100% (1)
- JVC AV-21B117BDocument10 pagesJVC AV-21B117Bdoraemon007100% (1)
- Service Manual: Fm/Am Compact Disc PlayerDocument10 pagesService Manual: Fm/Am Compact Disc PlayerelekossNo ratings yet
- stk412 240Document1 pagestk412 240luisclaudio31No ratings yet
- Simply Ph03-070808 Chassis Ph03Document4 pagesSimply Ph03-070808 Chassis Ph03Hector Arias100% (2)
- BU120 - HTS-20revJ SM PDFDocument35 pagesBU120 - HTS-20revJ SM PDFcoolruler40100% (1)
- Yamaha psr550 Sevicemanual PDFDocument50 pagesYamaha psr550 Sevicemanual PDFAnand s100% (1)
- Baa-Baa DistortionDocument1 pageBaa-Baa DistortionCah KampoengsNo ratings yet
- Peavey PR15D Service ManualDocument12 pagesPeavey PR15D Service ManualMartín SayagoNo ratings yet
- P3A - 60-100W Hi-Fi PowerAmp - Dual OutputDocument13 pagesP3A - 60-100W Hi-Fi PowerAmp - Dual OutputEdvaldo CostaNo ratings yet
- Philips HTB5550GDocument48 pagesPhilips HTB5550Gboroda2410No ratings yet
- 4 Band EqualizerDocument1 page4 Band EqualizerJesus Perez Potro100% (1)
- ISIS Professional AMPLIFICADOR - Zener 200W Yiroshi.Document1 pageISIS Professional AMPLIFICADOR - Zener 200W Yiroshi.Rafael MendozaNo ratings yet
- PV T-Max 1Document9 pagesPV T-Max 1akkNo ratings yet
- Simple Bass Treble Tone ControlDocument1 pageSimple Bass Treble Tone ControlsanapashokNo ratings yet
- Pioneer Sx-4, 5, 6, 7 SMDocument14 pagesPioneer Sx-4, 5, 6, 7 SMvali dNo ratings yet
- 100W MOSFET Power Amplifier Circuit Using IRFP240, IRFP9240Document30 pages100W MOSFET Power Amplifier Circuit Using IRFP240, IRFP9240Moises TorresNo ratings yet
- Class D Ucd Beta01 06.12Document1 pageClass D Ucd Beta01 06.12luizcpimentaNo ratings yet
- TDA7294 ELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFDocument3 pagesTDA7294 ELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFTitan SottoNo ratings yet
- 2kw Power Amplifier PDFDocument1 page2kw Power Amplifier PDFYuda AditamaNo ratings yet
- Od3 Schematic Carrillo Values Jan 2012Document4 pagesOd3 Schematic Carrillo Values Jan 2012Pablo Carrillo SanmartínNo ratings yet
- Ar7240 Ah1a PDFDocument1 pageAr7240 Ah1a PDFOscar Luis Quincoses Del ValleNo ratings yet
- 4d4fe32593743 - SiA 208RDocument8 pages4d4fe32593743 - SiA 208RManoj VattavilaNo ratings yet
- M-PRO2 DatasheetDocument17 pagesM-PRO2 DatasheetcdpangoNo ratings yet
- Class D Audio-Power Amplifiers - Interactive SimulationsDocument5 pagesClass D Audio-Power Amplifiers - Interactive SimulationsJUNIOR700No ratings yet
- K 4700Document16 pagesK 4700EvangelistaNo ratings yet
- STK 415Document12 pagesSTK 415bbchacinNo ratings yet
- D1KPro Schematic Ver.1Document3 pagesD1KPro Schematic Ver.1Danang Prasetiyo100% (1)
- Bassman Bass Preamp: Mod+layout Deadastronaut 2013Document1 pageBassman Bass Preamp: Mod+layout Deadastronaut 2013Jezz Mort0% (1)
- JLH 2001 DesignDocument4 pagesJLH 2001 DesignDaniel ScardiniNo ratings yet
- D:/Mydata/Ltspice/Blameless 1500V2.AscDocument1 pageD:/Mydata/Ltspice/Blameless 1500V2.AscrudiNo ratings yet
- Hfe Kef Psw3500 Service enDocument30 pagesHfe Kef Psw3500 Service enTiromancino Tiromancino100% (1)
- Ba 15218 NDocument6 pagesBa 15218 NsadadsNo ratings yet
- Kit 49. Ultrasonic Movement Detector Ii: ComponentsDocument2 pagesKit 49. Ultrasonic Movement Detector Ii: Componentsbhavyasri14No ratings yet
- 125-Electronics Projects Vol 26Document6 pages125-Electronics Projects Vol 26Ye Min OoNo ratings yet
- REGENERATIVE SHORTWAVE RECEIVER - Circuit Diagram - Forum - SeekICDocument1 pageREGENERATIVE SHORTWAVE RECEIVER - Circuit Diagram - Forum - SeekICdaniNo ratings yet
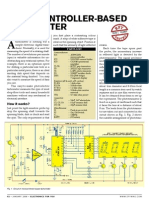
- Microcontroller-Based Tachometer: ConstructionDocument4 pagesMicrocontroller-Based Tachometer: Constructionjoniakom100% (1)
- HomeworkDocument7 pagesHomeworkDoutimiye Tonlagha EddieNo ratings yet
- Experimental CW QRP Transceiver: ANTENTOP-01 - 2006, # 008Document4 pagesExperimental CW QRP Transceiver: ANTENTOP-01 - 2006, # 008Al FrenchNo ratings yet
- Remote Control Fan RegulatorDocument42 pagesRemote Control Fan Regulatorshiningstar_abhi376567% (3)
- CR CRI CRN CRT Installation Guide PDFDocument28 pagesCR CRI CRN CRT Installation Guide PDFSarbendu PaulNo ratings yet
- Fluid Therapy & Resuscitation I Children (2008 Nov)Document41 pagesFluid Therapy & Resuscitation I Children (2008 Nov)evalNo ratings yet
- Choose The Word Whose Underlined Part Is Pronounced Differently From That of The Other WordsDocument2 pagesChoose The Word Whose Underlined Part Is Pronounced Differently From That of The Other WordsHuỳnh Lê Quang ĐệNo ratings yet
- CCISDocument1 pageCCISpravi3434No ratings yet
- The Story of StarbucksDocument15 pagesThe Story of StarbucksMichelle MahingqueNo ratings yet
- Beautiful BeginningsDocument16 pagesBeautiful BeginningsNew Jersey Jewish StandardNo ratings yet
- QCHP Applicant KitDocument9 pagesQCHP Applicant KitSzenthil KumarNo ratings yet
- GearDocument103 pagesGearyeop03No ratings yet
- Jurnal Ilmu Kehutanan: Pendugaan Simpanan Karbon Pada Kawasan Rehabilitasi Pesisir Selatan Pulau JawaDocument13 pagesJurnal Ilmu Kehutanan: Pendugaan Simpanan Karbon Pada Kawasan Rehabilitasi Pesisir Selatan Pulau JawaSwandi Lamrotua SimamoraeNo ratings yet
- Porter William Q4 Stability by Design PresDocument81 pagesPorter William Q4 Stability by Design Preskapital2100% (1)
- Lecture 6 - Principles of AnalysisDocument13 pagesLecture 6 - Principles of AnalysisSUKH SIDHUNo ratings yet
- Continuous Wire, Strip and Tube Annealing FurnacesDocument2 pagesContinuous Wire, Strip and Tube Annealing FurnacesEr Vijay MishraNo ratings yet
- Worksheet 5A - Responsibility and Accountability of A Teacher - Answer SheetDocument7 pagesWorksheet 5A - Responsibility and Accountability of A Teacher - Answer SheetMikhaela Isip TenaNo ratings yet
- Neet Previous Year Question Papers: Pranav PundarikDocument93 pagesNeet Previous Year Question Papers: Pranav Pundarikananyanandurkar10No ratings yet
- Biology Holiday HomeworkDocument29 pagesBiology Holiday HomeworkNikita SinghNo ratings yet
- Jamnagar District Petrol Pump: Rozy PetroleumDocument7 pagesJamnagar District Petrol Pump: Rozy PetroleumAdil BlochNo ratings yet
- Ref 48 35. FernandesDocument10 pagesRef 48 35. FernandesJuan Jose Vega AlbaNo ratings yet
- When AN IEP Meeting Is ConvenedDocument9 pagesWhen AN IEP Meeting Is ConvenedTwinkle CambangNo ratings yet
- Fluid Mechanics PDFDocument59 pagesFluid Mechanics PDFsunny chaurasiaNo ratings yet