You might also like
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Solutions To Problems in Goldstein, Classical Mechanics, Second EditionDocument70 pagesSolutions To Problems in Goldstein, Classical Mechanics, Second EditionYhunnior RoberthNo ratings yet
- ES2A7 - Fluid Mechanics Example Classes: Model Answers To Example Questions (Set II)Document8 pagesES2A7 - Fluid Mechanics Example Classes: Model Answers To Example Questions (Set II)wassan sabahNo ratings yet
- Relativistic DampingDocument18 pagesRelativistic DampingChrisTselentisNo ratings yet
- HCI H2 PHY P1 Suggested SolutionDocument4 pagesHCI H2 PHY P1 Suggested Solutionllilizheng8No ratings yet
- Solutions 1.8-Page 89 Problem 2: e V T V e X T XDocument8 pagesSolutions 1.8-Page 89 Problem 2: e V T V e X T Xukel de guzmanNo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- Solution To 2010 VJC Prelim H2 P1Document9 pagesSolution To 2010 VJC Prelim H2 P1cjcsucksNo ratings yet
- Some Basic Concepts: 1.1 Newtons Law and Inertial FramesDocument16 pagesSome Basic Concepts: 1.1 Newtons Law and Inertial Framestbrackman99No ratings yet
- Conservation of Momentum and Energy in Elastic CollisionsDocument6 pagesConservation of Momentum and Energy in Elastic CollisionsJoel SolomonNo ratings yet
- Chap 20Document18 pagesChap 202tlfdlNo ratings yet
- Solutions Chapter 2Document11 pagesSolutions Chapter 2JulianneNo ratings yet
- ALP Solutions Circular Motion - Resonance, KotaDocument20 pagesALP Solutions Circular Motion - Resonance, KotaPiyush PastorNo ratings yet
- Suggested Solution to 2010 JC2 Physics Prelims H2 P1Document17 pagesSuggested Solution to 2010 JC2 Physics Prelims H2 P1David ArdiansyahNo ratings yet
- Revision Lectures M122 2023 HandoutDocument4 pagesRevision Lectures M122 2023 HandoutRiley CollinsNo ratings yet
- Schroeder Problems 01.21-22Document4 pagesSchroeder Problems 01.21-22Sunil MewadakalalNo ratings yet
- SSM ch14Document5 pagesSSM ch14Gabriela Alves de SouzaNo ratings yet
- Q01 ModelDocument2 pagesQ01 ModelSaroj ShahNo ratings yet
- Topic8 GravitationDocument21 pagesTopic8 GravitationPatrick SibandaNo ratings yet
- 1.introduction To RotationDocument5 pages1.introduction To RotationAswath SNo ratings yet
- Onsite Test 2015: Limited Solutions: 1 Problem 1Document3 pagesOnsite Test 2015: Limited Solutions: 1 Problem 1ahmadNo ratings yet
- 5655 e 24165 FD 2Document2 pages5655 e 24165 FD 2Shakir Khattak100% (1)
- Goldstein: 1.1. ExerciceDocument9 pagesGoldstein: 1.1. ExercicePiLiGonzalezNo ratings yet
- 1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanDocument4 pages1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanKok Soon ChongNo ratings yet
- Universal Gravitation and Electric FieldsDocument19 pagesUniversal Gravitation and Electric FieldsJade50% (2)
- Problem Set 3Document5 pagesProblem Set 3James ConnaughtonNo ratings yet
- SSM ch13Document7 pagesSSM ch13Gabriela Alves de SouzaNo ratings yet
- Example Sheet 1 SolutionsDocument5 pagesExample Sheet 1 SolutionsDominic Dela CruzNo ratings yet
- Fox and Mcdonalds Introduction To Fluid Mechanics 8th Edition Pritchard Solutions Manual 2Document3 pagesFox and Mcdonalds Introduction To Fluid Mechanics 8th Edition Pritchard Solutions Manual 2finificcodille6d3h100% (21)
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- Lecture12 Physics of Many ParticlesDocument5 pagesLecture12 Physics of Many ParticleshuzaifaalyanhfNo ratings yet
- Chapter 9 03 PDFDocument3 pagesChapter 9 03 PDFShoshAlmazroeuiNo ratings yet
- Chapter 9 03 PDFDocument3 pagesChapter 9 03 PDFShoshAlmazroeuiNo ratings yet
- Example 1Document22 pagesExample 1Rohan sharmaNo ratings yet
- PC235W13 Assignment2 SolutionsDocument9 pagesPC235W13 Assignment2 SolutionskwokNo ratings yet
- Solution To Circular MotionDocument14 pagesSolution To Circular Motionhasnain_zeenwala987No ratings yet
- Summer Lecture 4 Kinematics PS SolnsDocument3 pagesSummer Lecture 4 Kinematics PS SolnsJean.lcNo ratings yet
- Phy212 CH15 Worksheet-KeyDocument3 pagesPhy212 CH15 Worksheet-KeyDeden MSNo ratings yet
- Mechanics NotesDocument32 pagesMechanics NotesroystaggersNo ratings yet
- Gold ExercisesDocument26 pagesGold ExercisesJuan Carlos RuizNo ratings yet
- Discussion Quiz 6 (40 Points) : 9.1 (M) 16 (KM/H)Document4 pagesDiscussion Quiz 6 (40 Points) : 9.1 (M) 16 (KM/H)Jan Adrian Galang FranciscoNo ratings yet
- Svcma Co1Document44 pagesSvcma Co1Sai KrishNo ratings yet
- Wendy Johanna Moreno Diaz - Post TaskDocument13 pagesWendy Johanna Moreno Diaz - Post Taskwendy jhoanna moreno diazNo ratings yet
- Bate and Mueller Astrophysics Homework 5 SolutionsDocument2 pagesBate and Mueller Astrophysics Homework 5 SolutionsAliNo ratings yet
- 7 Greiner-Classical MechanicsDocument3 pages7 Greiner-Classical Mechanicssupergravity66No ratings yet
- W W V V : Topic IntroductionDocument2 pagesW W V V : Topic Introductionarcee.sevenNo ratings yet
- ApplicationsDocument10 pagesApplicationsCatherine GuzmanNo ratings yet
- Homework 3 So LsDocument13 pagesHomework 3 So LsBrad StokesNo ratings yet
- Physics Cheat Sheet 1 Units 5 More Motion FormulasDocument1 pagePhysics Cheat Sheet 1 Units 5 More Motion FormulasMuhammad Pathan AbroNo ratings yet
- Halliday Resnick Walker Solutions Chapter 20Document5 pagesHalliday Resnick Walker Solutions Chapter 20Ahmar KhanNo ratings yet
- Physics 2D Relativity and Quantum Mechanics Homework SolutionsDocument6 pagesPhysics 2D Relativity and Quantum Mechanics Homework SolutionsMuzamil ShahNo ratings yet
- Energy Requirements of Sprinting: Part IDocument7 pagesEnergy Requirements of Sprinting: Part IShaun BrentnallNo ratings yet
- Mechanics Solutions 3Document4 pagesMechanics Solutions 3Argh AaarghNo ratings yet
- Engineering Science - Dynamic Engineering SystemsDocument13 pagesEngineering Science - Dynamic Engineering SystemsSteven Goddard100% (1)
- Midterm 2006 SolDocument4 pagesMidterm 2006 SolRaul AcevedoNo ratings yet
- Physics 141 Problem Set Solutions on Rotating Cylinders, Cones and RodsDocument3 pagesPhysics 141 Problem Set Solutions on Rotating Cylinders, Cones and RodsFahad ZiaNo ratings yet
- Physics Dynamics Examples SolvedDocument12 pagesPhysics Dynamics Examples Solvedhackmac1010No ratings yet
- Problem Set1 SolnsDocument3 pagesProblem Set1 SolnsIpsita MandalNo ratings yet
- CH 01Document6 pagesCH 01nwosu paul chinagoromNo ratings yet
- Quals 2013 Sec 1Document15 pagesQuals 2013 Sec 1paimoNo ratings yet
- "Introduction To Energy" Worksheet: Part 1. The Two Basic Types of EnergyDocument2 pages"Introduction To Energy" Worksheet: Part 1. The Two Basic Types of EnergyDaniela RomeroNo ratings yet
- The Health Physics Solution ManualDocument400 pagesThe Health Physics Solution ManualTahia BelalNo ratings yet
- Gravitation PPT 02 Physics Dropper-JEE (PJ41EB) Ankit Patidar SirDocument28 pagesGravitation PPT 02 Physics Dropper-JEE (PJ41EB) Ankit Patidar SirAnkit PatidarNo ratings yet
- Conservative Force & Non Conservative Force: (Work, Power, Energy)Document19 pagesConservative Force & Non Conservative Force: (Work, Power, Energy)Sabyasachi ChandraNo ratings yet
- Added MassDocument31 pagesAdded MassjdmorapNo ratings yet
- Ejector Systems Simulation Using HYSYSDocument4 pagesEjector Systems Simulation Using HYSYSfluto100% (1)
- Bridge Impact Testing: Standard Test Method ForDocument5 pagesBridge Impact Testing: Standard Test Method ForAlevj DbNo ratings yet
- MIT - MomentumDocument18 pagesMIT - MomentumleocarnNo ratings yet
- JEEPHYDocument558 pagesJEEPHYGokool PatelNo ratings yet
- Examen FísicaDocument8 pagesExamen FísicaMIldre666No ratings yet
- Wind Energy 101Document5 pagesWind Energy 101W. OmrNo ratings yet
- Physics 71 2nd LE ReviewerDocument3 pagesPhysics 71 2nd LE ReviewerAnne Glydel Cruzado DalaganNo ratings yet
- Science Test EnergyDocument4 pagesScience Test EnergyimandaNo ratings yet
- Work Energy PowerDocument4 pagesWork Energy Powercall4angela4980100% (2)
- Conservation of Energy: Physics 20 Unit C: Energy and WorkDocument10 pagesConservation of Energy: Physics 20 Unit C: Energy and WorkUnzal FatehullahNo ratings yet
- FM 5 Bernoulli and Energy EquationsDocument47 pagesFM 5 Bernoulli and Energy Equationsالياس يونس مرغلانيNo ratings yet
- Conservation of MomentumDocument8 pagesConservation of MomentumMat HafizNo ratings yet
- Control BookDocument496 pagesControl BookPra100% (1)
- CH 08Document74 pagesCH 08al hNo ratings yet
- LECTURE in PHysicSDocument13 pagesLECTURE in PHysicSKenji BaguaNo ratings yet
- hwP1 C03 1Document22 pageshwP1 C03 1ddkunkun267No ratings yet
- Cambridge A-Level Physics Work, Energy and Power GuideDocument57 pagesCambridge A-Level Physics Work, Energy and Power GuidePathmanathan NadesonNo ratings yet
- CH 7.4 - PPT - To Students - 25-3-2023Document13 pagesCH 7.4 - PPT - To Students - 25-3-2023jujuNo ratings yet
- The Thorny Way of Truth Part6 MarinovDocument332 pagesThe Thorny Way of Truth Part6 MarinovEvaldas StankeviciusNo ratings yet
- 3rd Quarter C.T 2020-2021 Subject: Physics Duration: 30 Min. Date: Name: Grade:-VIII Sec:-RollDocument4 pages3rd Quarter C.T 2020-2021 Subject: Physics Duration: 30 Min. Date: Name: Grade:-VIII Sec:-RollWakif Khan PrantoNo ratings yet
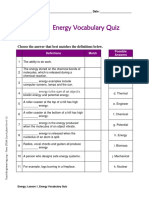
- Energy Vocabulary Quiz: Choose The Answer That Best Matches The Definitions BelowDocument1 pageEnergy Vocabulary Quiz: Choose The Answer That Best Matches The Definitions BelowElizabeth Alarcón HernándezNo ratings yet
- Edoc - Pub Homework PDFDocument24 pagesEdoc - Pub Homework PDFpippoNo ratings yet
- Smooth energy fluctuations with flywheelsDocument3 pagesSmooth energy fluctuations with flywheelsmusaveerNo ratings yet
- Chapter 3B - Work and EnergyDocument22 pagesChapter 3B - Work and Energyjaymart villarta100% (1)
- Percubaan Negeri Melaka 2020 (K2)Document7 pagesPercubaan Negeri Melaka 2020 (K2)FATIN FARHANAH BINTI HALIDIN MoeNo ratings yet