You might also like
- 3512 Throttle Position Error 91-8Document13 pages3512 Throttle Position Error 91-8harikrishnanpd3327100% (3)
- Wilson 1990Document13 pagesWilson 1990Sebastiao SilvaNo ratings yet
- Modified Proposed Provisions For Aseismic Design of Liquid Storage Tanks: Part II - Commentary and ExamplesDocument14 pagesModified Proposed Provisions For Aseismic Design of Liquid Storage Tanks: Part II - Commentary and Examplesafzal taiNo ratings yet
- Seismic Analysis of A Liquid Storage Tan PDFDocument5 pagesSeismic Analysis of A Liquid Storage Tan PDFMesfinNo ratings yet
- Simplified Buckling-Strength Determination of Pultruded FRP Structural BeamsDocument17 pagesSimplified Buckling-Strength Determination of Pultruded FRP Structural BeamswalaywanNo ratings yet
- SAP2000 - Problem 6-008Document18 pagesSAP2000 - Problem 6-008BlaKy2No ratings yet
- Dynamic Buckling of Cylindrical Storage PDFDocument14 pagesDynamic Buckling of Cylindrical Storage PDFamar alicheNo ratings yet
- Heintz 23 May 2002 Vny Fema-356Document21 pagesHeintz 23 May 2002 Vny Fema-356Antonio Herrera Pérez100% (1)
- Simple Procedure For Seismic Analysis of Seismic TanksDocument6 pagesSimple Procedure For Seismic Analysis of Seismic TanksMuhammad Usman100% (1)
- Bellos, 2017, Coomplete Solution For Soil Pressure of Rigid FoundationsDocument26 pagesBellos, 2017, Coomplete Solution For Soil Pressure of Rigid Foundationsprisciliano1No ratings yet
- Tanques ReforzadosDocument11 pagesTanques ReforzadosJulio Humberto Díaz RondánNo ratings yet
- (1963) Housner - The Bevavior of Inverted Pendulum Strtuctures During EarthquakesDocument15 pages(1963) Housner - The Bevavior of Inverted Pendulum Strtuctures During EarthquakesEdison GuzmanNo ratings yet
- Failure Case Studies: Steel StructuresDocument54 pagesFailure Case Studies: Steel StructuresZainab Farooq0% (1)
- Concrete Breakout Strength in Tension For Vertical Vessel Anchorage in Octagon PedestalsDocument16 pagesConcrete Breakout Strength in Tension For Vertical Vessel Anchorage in Octagon Pedestalspositron9898No ratings yet
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDocument8 pagesOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaNo ratings yet
- Treatment of Shear WallsDocument8 pagesTreatment of Shear Wallsakash kumarNo ratings yet
- Load and Resistance Factor DesignDocument9 pagesLoad and Resistance Factor DesignYan Naung Ko100% (2)
- Fema P440aDocument312 pagesFema P440atpadhy100% (1)
- A Historical and Technical Overview of The CB Coefficient in The AISC SpecificationsDocument5 pagesA Historical and Technical Overview of The CB Coefficient in The AISC SpecificationscharlesroberNo ratings yet
- Chapter - 7 Tall Cylindrical Shell PDFDocument5 pagesChapter - 7 Tall Cylindrical Shell PDFbuffle08No ratings yet
- Accelerated Brideg Construction in Washington StateDocument16 pagesAccelerated Brideg Construction in Washington StatesyedabdulhannanNo ratings yet
- P-752 Unit4Document505 pagesP-752 Unit4sysyphus01100% (1)
- Analytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalDocument12 pagesAnalytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalPrantik Adhar SamantaNo ratings yet
- Reinforcement For Slabs On GroundDocument7 pagesReinforcement For Slabs On GroundfordesignNo ratings yet
- Sharma Et Al-2017-Structural Concrete As PublishedDocument9 pagesSharma Et Al-2017-Structural Concrete As PublisheddebiNo ratings yet
- Wide-Flange Beam To HSS Column Moment Connections PDFDocument7 pagesWide-Flange Beam To HSS Column Moment Connections PDFing_fernandogalvez2015No ratings yet
- Cable Roofs HistoryDocument3 pagesCable Roofs HistorySparrow JackNo ratings yet
- Timber ColumnDocument8 pagesTimber ColumnAlam Mohammad Parvez SaifiNo ratings yet
- Structural AnalysisDocument27 pagesStructural AnalysisKhalid NadeemNo ratings yet
- Plates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisFrom EverandPlates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisRating: 5 out of 5 stars5/5 (1)
- Structural Seviceability - Floor Vibrations - Ellingwood Tallin PDFDocument18 pagesStructural Seviceability - Floor Vibrations - Ellingwood Tallin PDFLau Kim HwaNo ratings yet
- Design Example 1 Special Moment Frame: 2012 IBC SEAOC Structural/Seismic Design Manual, Vol. 4Document5 pagesDesign Example 1 Special Moment Frame: 2012 IBC SEAOC Structural/Seismic Design Manual, Vol. 4ponjove100% (1)
- Engineering Journal - 4th Quarter 2010 - Design of Structural Steel Pipe RacksDocument8 pagesEngineering Journal - 4th Quarter 2010 - Design of Structural Steel Pipe Racksger80No ratings yet
- 1997 - Veletsos Et Al - Dynamics of Solid Containing TanksDocument93 pages1997 - Veletsos Et Al - Dynamics of Solid Containing TanksmahdiebNo ratings yet
- Koiter PDFDocument14 pagesKoiter PDFLeonardoMadeira11No ratings yet
- Old Paper On Vierendeel TrussDocument20 pagesOld Paper On Vierendeel TrusssmwassyNo ratings yet
- Water Tank 2Document19 pagesWater Tank 2Paul KarijaNo ratings yet
- Chapter 6 Composite BeamsDocument10 pagesChapter 6 Composite BeamsDem Austria EspinoNo ratings yet
- Dynamic Response of Concrete Rectangular Liquid Tanks in Three-Dimensional Space PDFDocument142 pagesDynamic Response of Concrete Rectangular Liquid Tanks in Three-Dimensional Space PDFDhirendra Kumar PandeyNo ratings yet
- Galambos Ravindra 1976Document103 pagesGalambos Ravindra 1976Eric NolascoNo ratings yet
- Post Installed RebarDocument38 pagesPost Installed RebarSingDollarNo ratings yet
- Pile Supported Foundation (Pile Cap) Analysis Design ACI318 14 PDFDocument34 pagesPile Supported Foundation (Pile Cap) Analysis Design ACI318 14 PDFG100% (1)
- Seismic Analysis of Liquid Storage Tanks - K MeskourisDocument4 pagesSeismic Analysis of Liquid Storage Tanks - K Meskourisfanem46No ratings yet
- A Review On Applications of Tuned Liquid Dampers in Vibration ControlDocument17 pagesA Review On Applications of Tuned Liquid Dampers in Vibration ControlBharadwaj NandaNo ratings yet
- Introduction To Simulation With ANSYS MeDocument1 pageIntroduction To Simulation With ANSYS MeThanigai VelNo ratings yet
- Earthquake Damage and Seismic Code For BuildingsDocument10 pagesEarthquake Damage and Seismic Code For BuildingshemalcmistryNo ratings yet
- Nuclear Pump SeismicDocument11 pagesNuclear Pump SeismicClydeUnionNo ratings yet
- One Way SlabDocument69 pagesOne Way Slabforlogin018No ratings yet
- Design - Building - ACI-IPS-1 - Validation - ACI - 318-05 PDFDocument41 pagesDesign - Building - ACI-IPS-1 - Validation - ACI - 318-05 PDFMaqMaikNo ratings yet
- Elastic-Plastic Analysis of Simply Supported Rectangular Plates U PDFDocument178 pagesElastic-Plastic Analysis of Simply Supported Rectangular Plates U PDFTawsif AhmedNo ratings yet
- Usace - Response Spectra & Seismic Analysis For Concrete Hyd StructDocument248 pagesUsace - Response Spectra & Seismic Analysis For Concrete Hyd StructOmar ElioNo ratings yet
- Poulos 1983Document18 pagesPoulos 1983Anonymous v1blzDsEWANo ratings yet
- Comparison of Seismic Codes of 1981 Japan (BSLJ), 2000 Usa (IBC) AND 1999 IRAN (ICS)Document11 pagesComparison of Seismic Codes of 1981 Japan (BSLJ), 2000 Usa (IBC) AND 1999 IRAN (ICS)hazelfidNo ratings yet
- Seismic Analysis of Structures IIIDocument152 pagesSeismic Analysis of Structures IIINiroj MaharjanNo ratings yet
- DatabankofConcentricPunchingOspinaetal PDFDocument19 pagesDatabankofConcentricPunchingOspinaetal PDFАлександр БударинNo ratings yet
- Xie Liping 200906 PHD ThesisDocument374 pagesXie Liping 200906 PHD ThesisrammirisNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Air Carnival Aviation Academy: Paper - I Revision TestDocument5 pagesAir Carnival Aviation Academy: Paper - I Revision Testavijayakumar_1964No ratings yet
- 2Document1 page2David GaoNo ratings yet
- Envirox Catalysis 2Document2 pagesEnvirox Catalysis 2Balamurugan SelvarajuNo ratings yet
- Vapor Liquid Equilibrium Ethanol WaterDocument13 pagesVapor Liquid Equilibrium Ethanol Waterhao GamesNo ratings yet
- Exhibits Used in Report Released by Attorney Michael RoseDocument233 pagesExhibits Used in Report Released by Attorney Michael RoseHartford CourantNo ratings yet
- FDR Trafo Inter LabelDocument2 pagesFDR Trafo Inter LabelGopikrishna ChandranNo ratings yet
- Mechanical Privious Year Gate Papers Gate - 2000Document12 pagesMechanical Privious Year Gate Papers Gate - 2000Riddhi100% (1)
- Sony MHS-PM1 Service Manual Ver 1.1 2009.06 Rev-1 (9-852-668-12)Document14 pagesSony MHS-PM1 Service Manual Ver 1.1 2009.06 Rev-1 (9-852-668-12)Ossian Valera PinedaNo ratings yet
- Predictive Data Mining and Discovering Hidden Values of Data WarehouseDocument5 pagesPredictive Data Mining and Discovering Hidden Values of Data WarehouseLangit Merah Di SelatanNo ratings yet
- Indian Standard: Guide For Lateral Dynamic Load Test On PilesDocument21 pagesIndian Standard: Guide For Lateral Dynamic Load Test On PilesSubodh SontakkeNo ratings yet
- SpecoDocument24 pagesSpecoElumalai SrinivasanNo ratings yet
- C2-E2-F1 Test Report - Betb182-01Document11 pagesC2-E2-F1 Test Report - Betb182-01Vuk TomcicNo ratings yet
- Press Trust of IndiaDocument2 pagesPress Trust of IndiaShubham NagNo ratings yet
- Indoor Oxygen Monitor: Model OX 600Document2 pagesIndoor Oxygen Monitor: Model OX 600Victor AndreiNo ratings yet
- 01 Mon - Jun23 Trouble Shooting - Panel (Compatibility Mode)Document51 pages01 Mon - Jun23 Trouble Shooting - Panel (Compatibility Mode)بوند بوندNo ratings yet
- J C. W, CHC, PMP, CMGV C M G S: Changes in The Medical Gas and Vacuum System RequirementsDocument119 pagesJ C. W, CHC, PMP, CMGV C M G S: Changes in The Medical Gas and Vacuum System RequirementsCarmenDominguezJaraNo ratings yet
- Mondeo mk4Document292 pagesMondeo mk4Stefan DogaruNo ratings yet
- MX510 MX512 Operator and Installation ManualDocument242 pagesMX510 MX512 Operator and Installation ManualMiroslaw LabudaNo ratings yet
- Defense Works Int ST Inspect Maint and Test at Petrol Sites MechandElec PDFDocument53 pagesDefense Works Int ST Inspect Maint and Test at Petrol Sites MechandElec PDFbiglee82No ratings yet
- Service Manual: iPF700 SeriesDocument172 pagesService Manual: iPF700 SeriesblackhaWKfelNo ratings yet
- C680Document22 pagesC680dinhtung2210100% (2)
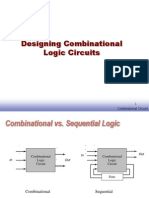
- Designing Combinational Logic CircuitsDocument127 pagesDesigning Combinational Logic CircuitsAnurag LaddhaNo ratings yet
- DSS Vantage CatalougeDocument40 pagesDSS Vantage Catalougedss.marufNo ratings yet
- Final Certificate For Construction Contracts - Designing Buildings WikiDocument4 pagesFinal Certificate For Construction Contracts - Designing Buildings Wikimarx0506No ratings yet
- Actuators For Space Applications: State of The Art and New TechnologiesDocument38 pagesActuators For Space Applications: State of The Art and New Technologiesrodrigo_fialho_15No ratings yet
- White Cement Prospect ICR 2008-12Document3 pagesWhite Cement Prospect ICR 2008-12jsabovik33No ratings yet
- Enhanced-Automated-School-Forms - RevisedDocument10 pagesEnhanced-Automated-School-Forms - RevisedritchellNo ratings yet
- Purposive Communication - CVDocument2 pagesPurposive Communication - CVMark BurlatNo ratings yet
- Applying Supply Chain Optimization Techniques To Workforce Planning ProblemsDocument11 pagesApplying Supply Chain Optimization Techniques To Workforce Planning ProblemsLuisa MeirellesNo ratings yet