You might also like
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Line Controlled RobotDocument27 pagesLine Controlled RobotchaitanyaNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- CNC Basic & Prog.Document89 pagesCNC Basic & Prog.Christine BrownNo ratings yet
- Terex PDFDocument48 pagesTerex PDFmovie hunter100% (1)
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0From EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Rating: 5 out of 5 stars5/5 (1)
- A Line Follower Robot-ICCAE 2010Document6 pagesA Line Follower Robot-ICCAE 2010Ioan DorofteiNo ratings yet
- Thermodynamics P K Nag Exercise Unsolved Problems SolvedDocument265 pagesThermodynamics P K Nag Exercise Unsolved Problems SolvedRavinder Antil90% (40)
- Robotics Unit-5 Question BankDocument6 pagesRobotics Unit-5 Question BankveerapandianNo ratings yet
- Design of A Full Adder Using PTL and GDI TechniqueDocument6 pagesDesign of A Full Adder Using PTL and GDI TechniqueIJARTETNo ratings yet
- Heidenhain TNC BasicDocument175 pagesHeidenhain TNC BasicReymondo Bundoc100% (2)
- Automated Guided Vehicle (AGV) Full TextDocument62 pagesAutomated Guided Vehicle (AGV) Full Textazriffaris100% (2)
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- TNC 430 HeidenhainDocument362 pagesTNC 430 HeidenhainCao ThanhNo ratings yet
- Ch-11 NC CNC DNC FMS Automation and RoboticsDocument143 pagesCh-11 NC CNC DNC FMS Automation and RoboticsshafiqNo ratings yet
- Material HandlingDocument39 pagesMaterial Handlingbathinsreenivas100% (1)
- 6788 Flexsim 1710 Manual ArialDocument1,657 pages6788 Flexsim 1710 Manual ArialQonitaHaulaKinantiNo ratings yet
- Swisslog WarehouseOfTheFuture PDFDocument16 pagesSwisslog WarehouseOfTheFuture PDFAkash_C1992No ratings yet
- FV609-Simulation Using ProModel - Charles HarrellDocument703 pagesFV609-Simulation Using ProModel - Charles HarrellRheza Nugraha PrabareswaraNo ratings yet
- Computer Assisted Part ProgrammingDocument21 pagesComputer Assisted Part ProgrammingSanthan SalaiNo ratings yet
- BullseyeDocument4 pagesBullseyeRuben CuevasNo ratings yet
- Robot Specifications - Robot ProgrammingDocument54 pagesRobot Specifications - Robot ProgrammingPriyanshu NainNo ratings yet
- Scope:: Last and First Name: Student IdDocument4 pagesScope:: Last and First Name: Student Idb7663664No ratings yet
- Autocad Lab ManualDocument24 pagesAutocad Lab Manualmadhu.ammu112No ratings yet
- NC, CNC & Robotics PDFDocument100 pagesNC, CNC & Robotics PDFSiddhrajsinh ZalaNo ratings yet
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- NC and CNC MachinesDocument25 pagesNC and CNC MachinesSabiha Hajdarbegović-HafizovićNo ratings yet
- Project Construction: 3.1 HC-05 Bluetooth To Serial Port ModuleDocument8 pagesProject Construction: 3.1 HC-05 Bluetooth To Serial Port Moduleanugya sharmaNo ratings yet
- Unit - III CNC Part ProgrammingDocument39 pagesUnit - III CNC Part ProgrammingNarayana PerumalNo ratings yet
- Computer Assisted Part Programming (APT, Automatically Programmed Tool)Document40 pagesComputer Assisted Part Programming (APT, Automatically Programmed Tool)kumareshNo ratings yet
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Document13 pagesMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoNo ratings yet
- Robotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot ProgrammingDocument30 pagesRobotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot Programmingmksamy2021No ratings yet
- Numerical ControlDocument36 pagesNumerical ControlsaishvNo ratings yet
- Introduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)Document20 pagesIntroduction To Robotics Working With Abb Irb 120 Robot: Robotics & Industrial Automation (Conestoga College)thanh_cdt01No ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot CoursesAmla SingNo ratings yet
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsDocument5 pagesA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanNo ratings yet
- UNIT II System SoftwareDocument11 pagesUNIT II System SoftwareArulmozhi ManoharanNo ratings yet
- CH 8 Industrial RoboticsDocument39 pagesCH 8 Industrial RoboticsDeepak PathakNo ratings yet
- Welcome !!! METE 284 P3-C1Document20 pagesWelcome !!! METE 284 P3-C1Shane Michael BacalsoNo ratings yet
- Computer Aided Part ProgrammingDocument19 pagesComputer Aided Part ProgrammingPiyush Aggarwal100% (4)
- AutoCad Basic Commands PDFDocument34 pagesAutoCad Basic Commands PDFspacejuyNo ratings yet
- Apt PDFDocument45 pagesApt PDFJignesh Rohit0% (1)
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument51 pagesWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraNo ratings yet
- CNC Project FullDocument22 pagesCNC Project FullDebabrata NandaNo ratings yet
- Omron Cp1e PDFDocument45 pagesOmron Cp1e PDFSuzaini SupingatNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemHoomi ShbNo ratings yet
- Harshit Robotics 10Document13 pagesHarshit Robotics 10harshitkargathara21No ratings yet
- NC CNC DNC FMS TheoryDocument21 pagesNC CNC DNC FMS Theorykamleshyadavmoney100% (1)
- XrotorDocument21 pagesXrotorFrancesco ReaNo ratings yet
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pages3 Waukesha Gas Engine Maintenance ManualMamunNo ratings yet
- Design Implementation and Control of A H PDFDocument11 pagesDesign Implementation and Control of A H PDFNikhil HasabiNo ratings yet
- Computer Aided Manufacturing (EME031)Document4 pagesComputer Aided Manufacturing (EME031)Hemant PalNo ratings yet
- RoboticsDocument26 pagesRoboticsmkmnawaz972No ratings yet
- An Instruction Set For The Efficient Implementation of The Cordic AlgorithmDocument4 pagesAn Instruction Set For The Efficient Implementation of The Cordic AlgorithmNaveen JainNo ratings yet
- 254464.1 Car Mikac VezaDocument6 pages254464.1 Car Mikac VezaengrodeNo ratings yet
- What Are The Storage Devices in CAD?Document23 pagesWhat Are The Storage Devices in CAD?shunmugeshNo ratings yet
- Chapter 3 - NC ProgrammingDocument12 pagesChapter 3 - NC ProgrammingnidhidarklordNo ratings yet
- Automation and Robotics AssignmentDocument13 pagesAutomation and Robotics AssignmentMoHit LalNo ratings yet
- NCERT Class 6 Political ScienceDocument80 pagesNCERT Class 6 Political ScienceNITIN KUMAR SHARMANo ratings yet
- Engineering Mechanics Question and Answers For GATE IAS PDFDocument37 pagesEngineering Mechanics Question and Answers For GATE IAS PDFshiv kr dubey100% (1)
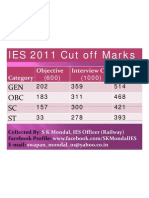
- IES 2011 Cut Off Marks Engineering Service Cutoff MarksDocument1 pageIES 2011 Cut Off Marks Engineering Service Cutoff MarksKBSMANITNo ratings yet
- Flexible Manufacturing SystemsDocument18 pagesFlexible Manufacturing SystemsVijay Kumar100% (1)
- What Is An FMS?: Flexible Manufacturing SystemDocument20 pagesWhat Is An FMS?: Flexible Manufacturing SystemUlyviatrisnaNo ratings yet
- Week 3 - Chapter 7 Process ManagementDocument68 pagesWeek 3 - Chapter 7 Process Managementarthaprabawa2005No ratings yet
- Agvs: Bridging The Gap in Automation: Brian Keiger, CsoDocument36 pagesAgvs: Bridging The Gap in Automation: Brian Keiger, Csobodeks dexNo ratings yet
- Pedal Operated ForkliftDocument56 pagesPedal Operated Forkliftfahamith ahamed100% (1)
- ExhibitorlistDocument17 pagesExhibitorlistAmazing PranavNo ratings yet
- Automobile Engineering Project IdeasDocument3 pagesAutomobile Engineering Project IdeasAditya ChaudharyNo ratings yet
- Positioning and Obstacle Avoidance of Automatic Guided Vehicle in Partially Known EnvironmentDocument10 pagesPositioning and Obstacle Avoidance of Automatic Guided Vehicle in Partially Known EnvironmentLord VolragonNo ratings yet
- Research Methodology BookDocument42 pagesResearch Methodology BookRicardo AntequeraNo ratings yet
- Major ProjectDocument70 pagesMajor ProjectMujtaba AliNo ratings yet
- New RAH Floor Plans Level 1 Updated 120115Document1 pageNew RAH Floor Plans Level 1 Updated 120115Budi KusumaNo ratings yet
- Practical Applications For Mobile Robots Based On Mecanum Wheels - A Systematic SurveyDocument13 pagesPractical Applications For Mobile Robots Based On Mecanum Wheels - A Systematic SurveyFlorentina AdascaliteiNo ratings yet
- Fork Truck For - Paper Roll Press DeliveryDocument1 pageFork Truck For - Paper Roll Press Deliveryservice9046No ratings yet
- Klasifikasi Material HandlingDocument56 pagesKlasifikasi Material HandlingKenny GurningNo ratings yet
- Preliminary Design of An Automatic Guided Vehicle (AGV) SystemDocument68 pagesPreliminary Design of An Automatic Guided Vehicle (AGV) SystemDanil KhardniNo ratings yet
- JBT General BrochureDocument5 pagesJBT General BrochureDeschepgNo ratings yet
- OS32C SensorsDocument2 pagesOS32C SensorsArjun SrinivasNo ratings yet
- Transfer Line System (TLS) : Essential Components of TLS AreDocument10 pagesTransfer Line System (TLS) : Essential Components of TLS Areburhanuddin bhavnagarwalaNo ratings yet
- Process StrategyDocument65 pagesProcess StrategyPoojitha VallabhaneniNo ratings yet
- PIANC Event Container Terminal QADocument1 pagePIANC Event Container Terminal QAFay NandaNo ratings yet
- Company Presentation en HighDocument39 pagesCompany Presentation en HighDuy Phạm VănNo ratings yet
- Tle9 Agricrop q2 m1 Handlingmaterialsequipment v2Document32 pagesTle9 Agricrop q2 m1 Handlingmaterialsequipment v2Bernadeth Torres LibradoNo ratings yet