You might also like
- 777e TDCDocument3 pages777e TDCDaniel AmanorNo ratings yet
- Skoda Workshop Manuals - Fabia Mk2 - Engine - 1.6 - 77 KW MPI Engine - Engine CyliDocument6 pagesSkoda Workshop Manuals - Fabia Mk2 - Engine - 1.6 - 77 KW MPI Engine - Engine CyliJose Antonio Jimenez Alvarez0% (1)
- Operator Controls: Operation and Maintenance ManualDocument44 pagesOperator Controls: Operation and Maintenance ManualTaufik RizalNo ratings yet
- TSB HyundaiDocument7 pagesTSB HyundaiNorman Valle SáenzNo ratings yet
- Finding Top Center Position For No. 1 Piston: Testing and AdjustingDocument4 pagesFinding Top Center Position For No. 1 Piston: Testing and AdjustingJohn GrayNo ratings yet
- B-Axis Synchronization Function Work Program - 02Document2 pagesB-Axis Synchronization Function Work Program - 02Kamal KannanNo ratings yet
- 27 Industrial Control - Kisi2okDocument29 pages27 Industrial Control - Kisi2okgempur rsNo ratings yet
- MML - Task - Result - MOD RET - 20210128 - 220229Document31 pagesMML - Task - Result - MOD RET - 20210128 - 220229odhi iskandarNo ratings yet
- Mini Project VikramDocument11 pagesMini Project VikramSachitananthan VasudevanNo ratings yet
- M CodesDocument8 pagesM CodesArvin BabuNo ratings yet
- YangDocument17 pagesYangSơn Nhất HàNo ratings yet
- Cascode Load ImpedanceDocument6 pagesCascode Load ImpedanceprajaktaguptaNo ratings yet
- FTTX Core Assign YGN TGG20210701 UpdateDocument66 pagesFTTX Core Assign YGN TGG20210701 UpdateAung Thein OoNo ratings yet
- Input Output Reg Output Reg Output Reg Output Reg Output Reg Reg Reg Always Posedge Begin If Begin If BeginDocument2 pagesInput Output Reg Output Reg Output Reg Output Reg Output Reg Reg Reg Always Posedge Begin If Begin If BeginmatthewivanNo ratings yet
- 2do - ScriptSiteMML - 0135537 - LM - Villa - Revolucion FallaDocument17 pages2do - ScriptSiteMML - 0135537 - LM - Villa - Revolucion FallaEder SalvadorNo ratings yet
- Embedded Systems Engineering - EC3461Document5 pagesEmbedded Systems Engineering - EC3461Minecraft BuilderNo ratings yet
- MML - Task - Result - HW - NS - NPM - LTE - Discrepancy UL Parameter - NS - 15012020 - V2 - Aceh AreaDocument15 pagesMML - Task - Result - HW - NS - NPM - LTE - Discrepancy UL Parameter - NS - 15012020 - V2 - Aceh AreaGlobalOne - North SumatraNo ratings yet
- Project Report Interfacing DC Motor With 8051 MicrocontrollerDocument8 pagesProject Report Interfacing DC Motor With 8051 MicrocontrollerAnum MemonNo ratings yet
- 430 Ope 08-05MDocument12 pages430 Ope 08-05MNéstor CastilloNo ratings yet
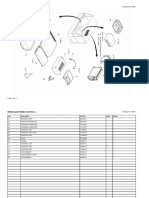
- DRIVE ELECTRONIC (45157812 - ) : Catalogue ID: 82562Document2 pagesDRIVE ELECTRONIC (45157812 - ) : Catalogue ID: 82562Mohamed RashedNo ratings yet
- BCCH Amoun T SDCC H Amou NT PDCH Amount (Static PDCH) PDCH Amou NT (Availa Ble PDCH) TCH+PD CH Amount Ts For RSL (64 K)Document18 pagesBCCH Amoun T SDCC H Amou NT PDCH Amount (Static PDCH) PDCH Amou NT (Availa Ble PDCH) TCH+PD CH Amount Ts For RSL (64 K)Fatwa RafiudinNo ratings yet
- Desktop Project2Document11 pagesDesktop Project2Khiêm NguyễnNo ratings yet
- Takumi Seiki MORISEIKIDocument33 pagesTakumi Seiki MORISEIKISơn Nhất HàNo ratings yet
- AutomationDocument12 pagesAutomationTuấn Sang TrầnNo ratings yet
- Part Chek Canon - Ir6570 - 5570Document2 pagesPart Chek Canon - Ir6570 - 5570mario pakek gNo ratings yet
- Basic Functions - ExamplesDocument2 pagesBasic Functions - ExamplesMỹ Anh 3B-PhạmNo ratings yet
- FANUC 功能位列表 R地址汇总Document26 pagesFANUC 功能位列表 R地址汇总Gurjeet NainNo ratings yet
- Dokumen - Tips - Gaminator 5 in 11Document17 pagesDokumen - Tips - Gaminator 5 in 11Varasteanu NicolaeNo ratings yet
- Schedule of CA Final FR 2022Document7 pagesSchedule of CA Final FR 2022ManviNo ratings yet
- Tugas Matriks InverseDocument7 pagesTugas Matriks InverseEdho Aza DahNo ratings yet
- TIWIDocument2 pagesTIWINuraeni semmaggaNo ratings yet
- Diesel Core-Inst ENGDocument18 pagesDiesel Core-Inst ENGcgeorgiou80No ratings yet
- Aderência - Agosto MUN GASDocument16 pagesAderência - Agosto MUN GASEngenharia AndradinaNo ratings yet
- Mmel A320 Juin 10Document789 pagesMmel A320 Juin 10charlesedoaurd.vionNo ratings yet
- Komatsu: Checkout ProcedureDocument13 pagesKomatsu: Checkout Procedurejorge luisNo ratings yet
- 3/21/20 11:08 PM MATLAB Command Window 1 of 2: Undefined Function or Variable 'Pi1'Document2 pages3/21/20 11:08 PM MATLAB Command Window 1 of 2: Undefined Function or Variable 'Pi1'Fauzan Ammar PutraNo ratings yet
- ReportDocument17 pagesReportNAM ĐỖ HẠONo ratings yet
- InfinityX - Electronics Assignment 30.6 Answers-1Document11 pagesInfinityX - Electronics Assignment 30.6 Answers-1Radharaman DasNo ratings yet
- Code Mach To Hop Va LedDocument12 pagesCode Mach To Hop Va LedTấn NguyễnNo ratings yet
- Opstart Af GasturbineDocument4 pagesOpstart Af GasturbineShaban RabieNo ratings yet
- Hydrolic Unit Atox MillDocument6 pagesHydrolic Unit Atox MillGoriss100% (1)
- Program 1 - Robot1 MAINLoadDocument6 pagesProgram 1 - Robot1 MAINLoadAdriana RosalesNo ratings yet
- VETRON Manual PDFDocument80 pagesVETRON Manual PDFAnonymous 1eiLlSNo ratings yet
- Raw 1Document2 pagesRaw 1Kanishka YadavNo ratings yet
- Slop DeflectionDocument16 pagesSlop DeflectionMiguel Ccoyllo SifuentesNo ratings yet
- 8 EUtranCell 20221021 1148Document142 pages8 EUtranCell 20221021 1148achanafi234No ratings yet
- Ejemplo 5Document7 pagesEjemplo 5Oscar Eulate ChoqueNo ratings yet
- Using The Diagnostic Indicator To Determine Diagnostic CodesDocument4 pagesUsing The Diagnostic Indicator To Determine Diagnostic CodesRocko CallejasNo ratings yet
- MatricialDocument12 pagesMatricialMaria Bautista AvellanedaNo ratings yet
- Eletrical Door SettingDocument2 pagesEletrical Door Settingömer faruk erolNo ratings yet
- Immobilizer System: Main MenuDocument7 pagesImmobilizer System: Main Menusontong234No ratings yet
- Excavator Switches TestDocument7 pagesExcavator Switches TestDaniel Rhasty-ghee AhmanorNo ratings yet
- Top FindingDocument4 pagesTop FindingERIC ERICNo ratings yet
- COE121L-E01 LabReport 06 SANGALANGGABRIEL-CARLODocument9 pagesCOE121L-E01 LabReport 06 SANGALANGGABRIEL-CARLORaj Daniel MagnoNo ratings yet
- Program YaskawaDocument2 pagesProgram Yaskawaahsan ullahNo ratings yet
- Onnet-Medel-Cl 3 - 1 - 2 - P2-18485 HHPP - PlaniDocument4,183 pagesOnnet-Medel-Cl 3 - 1 - 2 - P2-18485 HHPP - PlaniDavid BerdugoNo ratings yet
- Weitreb 7Document3 pagesWeitreb 7WillNo ratings yet
- Deluxe Instrumentation Service CodesDocument4 pagesDeluxe Instrumentation Service CodesEdgar Carmen PaladinesNo ratings yet