You might also like
- Sri Ganesh College of Arts and Science: Unit - I Digital Satellite SystemsDocument67 pagesSri Ganesh College of Arts and Science: Unit - I Digital Satellite SystemsMauliy ChinnaduraiNo ratings yet
- 3grfse 1pdf PDFDocument42 pages3grfse 1pdf PDFzerospace100% (4)
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Mitigation of Power System Transients in A Multi - Machine System Using STATCOMDocument11 pagesMitigation of Power System Transients in A Multi - Machine System Using STATCOMIJRASETPublicationsNo ratings yet
- CHEM 135 Exam 2 F15 KeyDocument7 pagesCHEM 135 Exam 2 F15 KeyMikeNo ratings yet
- Development of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsDocument8 pagesDevelopment of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsK. JayarajanNo ratings yet
- FPGA Based SVM Comtroller Report FinalDocument34 pagesFPGA Based SVM Comtroller Report FinalShiva Prasad MNo ratings yet
- Mitsubishi A500 Series VFD ManualDocument257 pagesMitsubishi A500 Series VFD ManualMROstop.com100% (2)
- Development of FPGA Based Smart Controller For Speed Control of BLDC MotorDocument7 pagesDevelopment of FPGA Based Smart Controller For Speed Control of BLDC MotorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Hawassa Millennium Pepsi Cola PlantDocument49 pagesHawassa Millennium Pepsi Cola PlantYonas Biniam91% (33)
- Zlatka Tecec Kvalifikacijki Ispit Rad EngDocument6 pagesZlatka Tecec Kvalifikacijki Ispit Rad EngkurabyqldNo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Performance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerDocument4 pagesPerformance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerShiva PaddamNo ratings yet
- Bala ProjectDocument7 pagesBala ProjectKaruna Reddy YennapusaNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Igbt Based On Vector Control of Induction Motor DriveDocument8 pagesIgbt Based On Vector Control of Induction Motor DriveesatjournalsNo ratings yet
- Coordinated Design of A Mb-Pss and Statcom Controller To Enhance Power System StabilityDocument22 pagesCoordinated Design of A Mb-Pss and Statcom Controller To Enhance Power System StabilityAmmar MyhoubNo ratings yet
- A New Control Technique FDocument8 pagesA New Control Technique Fpixelo09No ratings yet
- Fuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavDocument10 pagesFuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavLuis Andrew LumbreNo ratings yet
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedNo ratings yet
- PWM Based Passive Power Factor CorrectionDocument4 pagesPWM Based Passive Power Factor CorrectionijaertNo ratings yet
- V/f Control of Induction Motor Using HSRPECDocument46 pagesV/f Control of Induction Motor Using HSRPECAnimesh PatraNo ratings yet
- 9bus System, Power FlowDocument17 pages9bus System, Power FlowZeeshan AhmedNo ratings yet
- Power System Stabilizers As Undergraduate Control Design ProjectsDocument8 pagesPower System Stabilizers As Undergraduate Control Design Projectsabhikirk99No ratings yet
- Ijert Ijert: Control of Three Phase BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIjert Ijert: Control of Three Phase BLDC Motor Using Fuzzy Logic ControllergbksnNo ratings yet
- Transient Stability Analysis of Power System Using MatlabDocument5 pagesTransient Stability Analysis of Power System Using MatlabSaddam HussainNo ratings yet
- Design, Testing, and Analysis of STATCOM and TCSC For Real-Time SimulationDocument19 pagesDesign, Testing, and Analysis of STATCOM and TCSC For Real-Time Simulationtien chau minhNo ratings yet
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariNo ratings yet
- Space Vector PWM - 1Document5 pagesSpace Vector PWM - 1guanitouNo ratings yet
- Co-Simulation of BLDC Motor Commutation by Using MDocument7 pagesCo-Simulation of BLDC Motor Commutation by Using Mahurtado017No ratings yet
- Modelling and Analysis of Induction Motor Using LabviewDocument11 pagesModelling and Analysis of Induction Motor Using LabviewNituNo ratings yet
- To Study, Analysis and Implementation of Power Quality Improvement Using DSTATCOM With ANN Back Propagation AlgorithmDocument8 pagesTo Study, Analysis and Implementation of Power Quality Improvement Using DSTATCOM With ANN Back Propagation AlgorithmEditor IJTSRDNo ratings yet
- Archive of SID: Dynamic Controllers Design For STATCOMDocument7 pagesArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanNo ratings yet
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDocument7 pagesDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNo ratings yet
- MATLAB Simulation of 3-Level PWM Inverter Fed Motor Speed ControlDocument6 pagesMATLAB Simulation of 3-Level PWM Inverter Fed Motor Speed Controlraviraj_kumbhar1988No ratings yet
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNo ratings yet
- Using The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped DevicesDocument27 pagesUsing The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped Devicesbadro1980No ratings yet
- EE 392 Lab 2: DC Motor Speed Control DesignDocument4 pagesEE 392 Lab 2: DC Motor Speed Control DesignAbdalla FathyNo ratings yet
- MATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GADocument10 pagesMATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GApragatinareshNo ratings yet
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocument12 pagesDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250No ratings yet
- First Steps Towards An Open Control Architecture For A PUMA 560Document6 pagesFirst Steps Towards An Open Control Architecture For A PUMA 560Rajeev GargNo ratings yet
- MATLAB/Simlink Based Power System Stabilizer with PID controllerDocument14 pagesMATLAB/Simlink Based Power System Stabilizer with PID controllerragaNo ratings yet
- 23 1400 Kahleongkoo 01Document12 pages23 1400 Kahleongkoo 01jhjkljghjhlNo ratings yet
- Improvement of Power Quality by Using Advanced Reactive Power CompensationDocument8 pagesImprovement of Power Quality by Using Advanced Reactive Power CompensationResearch ParkNo ratings yet
- Design of A Fuzzy Logic Controller Based STATCOM For IEEEDocument6 pagesDesign of A Fuzzy Logic Controller Based STATCOM For IEEEharini shivNo ratings yet
- Optimal Parameters Estomation of BLDC Motor by Kohonen's Self Organizing Map Method (B. Jaganathan, Et Al)Document4 pagesOptimal Parameters Estomation of BLDC Motor by Kohonen's Self Organizing Map Method (B. Jaganathan, Et Al)MarioNo ratings yet
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveDocument10 pagesAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraNo ratings yet
- 39 Submission 1Document14 pages39 Submission 1Thimothy BasavaNo ratings yet
- Complete System Simulation of a 3-Phase InverterDocument6 pagesComplete System Simulation of a 3-Phase InverterIvan VillanevaNo ratings yet
- Design of A Fuzzy Logic Controller Based STATCOM For IEEE9 Bus SystemDocument7 pagesDesign of A Fuzzy Logic Controller Based STATCOM For IEEE9 Bus Systemakhil nigamNo ratings yet
- Implementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeDocument23 pagesImplementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeMos CraciunNo ratings yet
- 245915-FinalDocument13 pages245915-FinalUtkarsh PrakashNo ratings yet
- Design_and_Implementation_of_Switched_Capacitor_BaDocument15 pagesDesign_and_Implementation_of_Switched_Capacitor_BaDEEPAK PRAJAPATINo ratings yet
- FC TCRDocument11 pagesFC TCRChinmay DeshpandeNo ratings yet
- Performance Analysis of LLC Resonant Converter Incorporating Pi Fuzzy and Neural ControllersDocument12 pagesPerformance Analysis of LLC Resonant Converter Incorporating Pi Fuzzy and Neural ControllersDouglas SantosNo ratings yet
- Imitation Model of A High-Speed Induction Motor WiDocument7 pagesImitation Model of A High-Speed Induction Motor WiMellina LisboaNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- Matrix Converter Control SystemDocument4 pagesMatrix Converter Control SystemRatnesh JainNo ratings yet
- Adaptive Control For Low-Frequency Power OscillationsDocument6 pagesAdaptive Control For Low-Frequency Power OscillationsAJER JOURNALNo ratings yet
- SVC simulation improves transient stabilityDocument3 pagesSVC simulation improves transient stabilityvaucejoNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Note Ex1 Lab4Document1 pageNote Ex1 Lab4makroumNo ratings yet
- Windturbine GHDocument6 pagesWindturbine GHmakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Modeling Wind Farms in Power System Simulation Studies: A ReviewDocument21 pagesModeling Wind Farms in Power System Simulation Studies: A ReviewmakroumNo ratings yet
- Example RobDocument5 pagesExample RobmakroumNo ratings yet
- Modeling Wind Farms in Power System Simulation Studies: A ReviewDocument21 pagesModeling Wind Farms in Power System Simulation Studies: A ReviewmakroumNo ratings yet
- Windjkl 123Document20 pagesWindjkl 123makroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocument6 pagesElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNo ratings yet
- Im Speed Control PDFDocument64 pagesIm Speed Control PDFseshubabu_999No ratings yet
- Im Speed Control PDFDocument64 pagesIm Speed Control PDFseshubabu_999No ratings yet
- Pammi CV 2019Document5 pagesPammi CV 2019Pammi SudhakarNo ratings yet
- Triaxial Icp® Accelerometer: 356B21 Performance English SI Optional VersionsDocument1 pageTriaxial Icp® Accelerometer: 356B21 Performance English SI Optional Versionssinner86No ratings yet
- Process Development For Yellow Phosphor Coating On Blue ChipDocument6 pagesProcess Development For Yellow Phosphor Coating On Blue ChipPrakash Babu ShettigarNo ratings yet
- Maximize power quality and efficiency with MaxSine active filterDocument4 pagesMaximize power quality and efficiency with MaxSine active filterMario Penelo RivaNo ratings yet
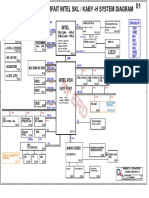
- Power Pavilion Parfait Intel SKL / Kaby - H System DiagramDocument52 pagesPower Pavilion Parfait Intel SKL / Kaby - H System DiagramAbnesis NesisNo ratings yet
- .625 DIA & HEX: Outline/Installation Drawing, MODEL 3100D24Document2 pages.625 DIA & HEX: Outline/Installation Drawing, MODEL 3100D24info5280No ratings yet
- TTP 2011catalogDocument200 pagesTTP 2011catalogmcecen6661No ratings yet
- Pm1000 FM Transmitter User ManualDocument101 pagesPm1000 FM Transmitter User ManualMwaura KangetheNo ratings yet
- NDT - Ultrasonic Examination: Date: July 2008Document51 pagesNDT - Ultrasonic Examination: Date: July 2008Ad Man GeTigNo ratings yet
- Encoders & Resolvers:: How To Choose The Right Feedback OptionDocument5 pagesEncoders & Resolvers:: How To Choose The Right Feedback OptionAdam SmithNo ratings yet
- Crouse Hinds Crouse Hinds If1823 Instruction SheetDocument8 pagesCrouse Hinds Crouse Hinds If1823 Instruction Sheetedan28No ratings yet
- TUGASAN KUMPULAN (DC Generator)Document43 pagesTUGASAN KUMPULAN (DC Generator)Zainuddin BusuNo ratings yet
- BSIM4 ManualDocument188 pagesBSIM4 ManualAnitha MariappanNo ratings yet
- Chapter 21 Air Conditioning PDFDocument67 pagesChapter 21 Air Conditioning PDFIman GhNo ratings yet
- A - ELSB - Cat - 2020 - II - 05 - Protection and Safety - Preview - 26-10-2020Document190 pagesA - ELSB - Cat - 2020 - II - 05 - Protection and Safety - Preview - 26-10-2020Vanja KrunicNo ratings yet
- LM3900 Norton Op-Amp Guide: Current-Based Circuits & ApplicationsDocument2 pagesLM3900 Norton Op-Amp Guide: Current-Based Circuits & ApplicationsJoseGarciaRuizNo ratings yet
- GE UNI24R DL control unit installation guideDocument16 pagesGE UNI24R DL control unit installation guideLuis Jesus100% (1)
- Details PDF: Image Part Number Description Manufacturer QuantityDocument1 pageDetails PDF: Image Part Number Description Manufacturer QuantityChaitanya SilaNo ratings yet
- CS2106 Tutorial 8Document2 pagesCS2106 Tutorial 8weitsangNo ratings yet
- D1107Document1 pageD1107api-3698007No ratings yet
- Designing Optimal Drive Circuits for SAR ADCsDocument12 pagesDesigning Optimal Drive Circuits for SAR ADCsemv_prasadNo ratings yet
- Module No. 1: Republic of The Philippines Department of Education Public Technical - Vocational High SchoolsDocument211 pagesModule No. 1: Republic of The Philippines Department of Education Public Technical - Vocational High SchoolszNo ratings yet
- Ployphase DecompositionDocument29 pagesPloyphase DecompositionTechy GuyNo ratings yet
- Modeling and Simulation For An 8 KW Three-Phase Grid-Connected Photo-Voltaic Power SystemDocument10 pagesModeling and Simulation For An 8 KW Three-Phase Grid-Connected Photo-Voltaic Power SystemLuis Alberto Valverde SánchezNo ratings yet
- Half AderDocument1 pageHalf AderNaveed UL HassanNo ratings yet