You might also like
- PFC Using Buck Converter in Single Phase AC-DC CircuitsDocument51 pagesPFC Using Buck Converter in Single Phase AC-DC CircuitsSathya NarayananNo ratings yet
- 13 - Mohamed Ezzat - FinalPaperDocument7 pages13 - Mohamed Ezzat - FinalPaperiisteNo ratings yet
- PWM Based Passive Power Factor CorrectionDocument4 pagesPWM Based Passive Power Factor CorrectionijaertNo ratings yet
- Project Report On Input Power Factor Correction of Ac To DC Converter CircuitDocument57 pagesProject Report On Input Power Factor Correction of Ac To DC Converter CircuitAkshyat Das100% (7)
- LED Applications Design and Implementation of A Novel Bridgeless Interleaved SEPIC Converter ForDocument5 pagesLED Applications Design and Implementation of A Novel Bridgeless Interleaved SEPIC Converter ForArun KumarNo ratings yet
- LDO Voltage Regulator by Sanjay Singh NIT KKRDocument9 pagesLDO Voltage Regulator by Sanjay Singh NIT KKRSanjay SinghNo ratings yet
- Performance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerDocument4 pagesPerformance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerShiva PaddamNo ratings yet
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Document6 pagesFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaNo ratings yet
- Icbdm 29 PDFDocument6 pagesIcbdm 29 PDFPudhur Kannan ManiNo ratings yet
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Power Design LabDocument26 pagesPower Design Labhaider aliNo ratings yet
- Bridgeless Power Factor Correction ThesisDocument7 pagesBridgeless Power Factor Correction Thesisafkogsfea100% (2)
- An Isolated Series Resonant Converter For PV Application: Manalan108@gmailcomDocument4 pagesAn Isolated Series Resonant Converter For PV Application: Manalan108@gmailcomRaja SajinNo ratings yet
- A PFC Based EV Battery Charger Using A Bridgeless Isolated SEPIC ConverterDocument9 pagesA PFC Based EV Battery Charger Using A Bridgeless Isolated SEPIC ConverterIJRASETPublicationsNo ratings yet
- DSP-Based AC-DC-AC Converter SPWM ControlDocument18 pagesDSP-Based AC-DC-AC Converter SPWM ControlSteve TranNo ratings yet
- Design of Single Phase Inverter Using Dspic30F4013: Mr. R.SenthilkumarDocument7 pagesDesign of Single Phase Inverter Using Dspic30F4013: Mr. R.SenthilkumarsureshhdreamNo ratings yet
- Addis Ababa Science & Techenology UniverstyDocument5 pagesAddis Ababa Science & Techenology Universtyfiraol temesgenNo ratings yet
- Improving Power Factors by Using Landsman Converter in PMBLDC MotorDocument5 pagesImproving Power Factors by Using Landsman Converter in PMBLDC MotorVIVA-TECH IJRINo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tom PPT 2021Document20 pagesTom PPT 2021mebrahtenNo ratings yet
- Design and Analysis of High Efficiency DC - DC Boost Converter For EV Charging ApplicationsDocument9 pagesDesign and Analysis of High Efficiency DC - DC Boost Converter For EV Charging ApplicationsIJRASETPublicationsNo ratings yet
- Power System Restoration WithDocument5 pagesPower System Restoration WithSandhya ShyamasundarNo ratings yet
- Indirect Vector Control of Induction Motor ThesisDocument5 pagesIndirect Vector Control of Induction Motor ThesisValerie Felton100% (2)
- FC TCRDocument11 pagesFC TCRChinmay DeshpandeNo ratings yet
- Plagius - Report - Sandi Budi K. #359 (1570557035)Document8 pagesPlagius - Report - Sandi Budi K. #359 (1570557035)sandiNo ratings yet
- Power Factor Correction of Single Phase Induction Motor Using PLCDocument8 pagesPower Factor Correction of Single Phase Induction Motor Using PLCAlvin Nugroho100% (1)
- Analysis of Low Noise Smps SystemDocument11 pagesAnalysis of Low Noise Smps SystemIAEME PublicationNo ratings yet
- 486 N20038 PDFDocument6 pages486 N20038 PDFguddu13481No ratings yet
- Design and Performance Evaluation of 2kva Microcontroller - Based StabilizerDocument14 pagesDesign and Performance Evaluation of 2kva Microcontroller - Based StabilizerGAPOSA ElectricalNo ratings yet
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SNo ratings yet
- Design and Analysis of Negative Output LuoDocument6 pagesDesign and Analysis of Negative Output LuoYaredNo ratings yet
- P. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDocument6 pagesP. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDivya ShriNo ratings yet
- PID Controller Design for DC-DC Converter CircuitsDocument6 pagesPID Controller Design for DC-DC Converter CircuitsannaNo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- International Journal of Research in Computer Applications and RoboticsDocument8 pagesInternational Journal of Research in Computer Applications and Roboticsakashgrg07No ratings yet
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNo ratings yet
- Fuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavDocument10 pagesFuzzy Based Turbine Governor For Hydro Power Plant: Nanaware R.A., Dr. S.R. Sawant and Dr. B.T. JadhavLuis Andrew LumbreNo ratings yet
- Muhd Halalluddin Bin Abdul Rahim 1Document40 pagesMuhd Halalluddin Bin Abdul Rahim 1Mohamad SyazwanNo ratings yet
- Design and Analysis of Closed Loop Interleaved Boost Converter With Arduino Based Soft PI Controller For Photovoltiac ApplicationDocument5 pagesDesign and Analysis of Closed Loop Interleaved Boost Converter With Arduino Based Soft PI Controller For Photovoltiac ApplicationNtokozo HlatshwayoNo ratings yet
- Traffic Light Control Design Using 555 Timer and 4017 CounterDocument16 pagesTraffic Light Control Design Using 555 Timer and 4017 CounterPrerit RathiNo ratings yet
- Special Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDocument3 pagesSpecial Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDONE AND DUSTEDNo ratings yet
- Single-Phase SEPIC Based PFC Converter For PMBLDCM Drive in Air-Conditioning SystemDocument6 pagesSingle-Phase SEPIC Based PFC Converter For PMBLDCM Drive in Air-Conditioning Systemsarav03No ratings yet
- Fractional Order PID Controlled PV Buck Boost ConvDocument7 pagesFractional Order PID Controlled PV Buck Boost ConvSai Arja SaiNo ratings yet
- Design and Simulations of Sliding Mode Controller for DC-DC Buck ConverterDocument8 pagesDesign and Simulations of Sliding Mode Controller for DC-DC Buck ConverteryoucefNo ratings yet
- Design High Gain DC-DC Boost Converter With Coupling Inductor and Simulation in PsimDocument8 pagesDesign High Gain DC-DC Boost Converter With Coupling Inductor and Simulation in PsimInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Development of Real Time Controller of A Single Machine Infinite Bus System With PSSDocument7 pagesDevelopment of Real Time Controller of A Single Machine Infinite Bus System With PSSmakroumNo ratings yet
- Microcontroller Based ProjectDocument31 pagesMicrocontroller Based ProjectshashankfruNo ratings yet
- Analysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerDocument8 pagesAnalysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerHitakshi GuptaNo ratings yet
- M ErginSahinDocument9 pagesM ErginSahinbbb bbbNo ratings yet
- Thesis On Power Quality ImprovementDocument6 pagesThesis On Power Quality Improvementifywpqvcf100% (2)
- Power Factor Correction Using Boost Converter ThesisDocument4 pagesPower Factor Correction Using Boost Converter Thesisnatashajohnsonmanchester100% (2)
- ECE422 Project Design - Power Supply - Castillo, CRC, Marasigan, AA., Umali, GCD, Villapando, ZMBDocument19 pagesECE422 Project Design - Power Supply - Castillo, CRC, Marasigan, AA., Umali, GCD, Villapando, ZMBAlexis MarasiganNo ratings yet
- Sliding Mode Controllers For Power Electronic Converters (Lecture Notes in Electrical Engineering)Document108 pagesSliding Mode Controllers For Power Electronic Converters (Lecture Notes in Electrical Engineering)derghalNo ratings yet
- Design of A Fuzzy Logic Controller Based STATCOM For IEEE9 Bus SystemDocument7 pagesDesign of A Fuzzy Logic Controller Based STATCOM For IEEE9 Bus Systemakhil nigamNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Patients Not Patents Drug Research and DevelopmentDocument12 pagesPatients Not Patents Drug Research and DevelopmentDouglas SantosNo ratings yet
- Scripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDocument23 pagesScripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDouglas SantosNo ratings yet
- SSRN Id3666869 PDFDocument43 pagesSSRN Id3666869 PDFDouglas SantosNo ratings yet
- A Totally New System Is Needed For Drug Research ADocument2 pagesA Totally New System Is Needed For Drug Research ADouglas SantosNo ratings yet
- Scripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDocument18 pagesScripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDouglas SantosNo ratings yet
- SSRN Id3345185 PDFDocument4 pagesSSRN Id3345185 PDFDouglas SantosNo ratings yet
- SSRN Id3345185 PDFDocument4 pagesSSRN Id3345185 PDFDouglas SantosNo ratings yet
- Atropine Refractoriness in OP and Carbamate PoisoningDocument18 pagesAtropine Refractoriness in OP and Carbamate PoisoningDouglas SantosNo ratings yet
- Virtual Conference Abstracts Address COVID-19 Societal ImpactsDocument31 pagesVirtual Conference Abstracts Address COVID-19 Societal ImpactsDouglas SantosNo ratings yet
- SSRN Id3660732 PDFDocument10 pagesSSRN Id3660732 PDFDouglas SantosNo ratings yet
- SSRN Id3660732 PDFDocument10 pagesSSRN Id3660732 PDFDouglas SantosNo ratings yet
- Performance Analysis of LLC Resonant Converter Incorporating Pi Fuzzy and Neural ControllersDocument12 pagesPerformance Analysis of LLC Resonant Converter Incorporating Pi Fuzzy and Neural ControllersDouglas SantosNo ratings yet
- Atropine Refractoriness in OP and Carbamate PoisoningDocument18 pagesAtropine Refractoriness in OP and Carbamate PoisoningDouglas SantosNo ratings yet
- SSRN Id3666869 PDFDocument43 pagesSSRN Id3666869 PDFDouglas SantosNo ratings yet
- Scripta Materialia: Lattice Parameter of Cementite Phase in Pearlite StructureDocument11 pagesScripta Materialia: Lattice Parameter of Cementite Phase in Pearlite StructureDouglas SantosNo ratings yet
- Virtual Conference Abstracts Address COVID-19 Societal ImpactsDocument31 pagesVirtual Conference Abstracts Address COVID-19 Societal ImpactsDouglas SantosNo ratings yet
- Atropine Refractoriness in OP and Carbamate PoisoningDocument18 pagesAtropine Refractoriness in OP and Carbamate PoisoningDouglas SantosNo ratings yet
- Scripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDocument18 pagesScripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDouglas SantosNo ratings yet
- SSRN Id3345185 PDFDocument4 pagesSSRN Id3345185 PDFDouglas SantosNo ratings yet
- Scripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDocument18 pagesScripta Materialia: Ultrahigh Thermal Conductivity of Interface Materials by Good Wettability of Indium and DiamondDouglas SantosNo ratings yet
- Scripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDocument23 pagesScripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDouglas SantosNo ratings yet
- SSRN Id3666869 PDFDocument43 pagesSSRN Id3666869 PDFDouglas SantosNo ratings yet
- SSRN Id3666869 PDFDocument43 pagesSSRN Id3666869 PDFDouglas SantosNo ratings yet
- Scripta Materialia: Lattice Parameter of Cementite Phase in Pearlite StructureDocument11 pagesScripta Materialia: Lattice Parameter of Cementite Phase in Pearlite StructureDouglas SantosNo ratings yet
- Atropine Refractoriness in OP and Carbamate PoisoningDocument18 pagesAtropine Refractoriness in OP and Carbamate PoisoningDouglas SantosNo ratings yet
- Scripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDocument23 pagesScripta Materialia: Zinc Manganate/manganic Oxide Bi-Component Nanorod As Excellent Cathode For Zinc-Ion BatteryDouglas SantosNo ratings yet
- SSRN Id3345185 PDFDocument4 pagesSSRN Id3345185 PDFDouglas SantosNo ratings yet
- SSRN Id3345185 PDFDocument4 pagesSSRN Id3345185 PDFDouglas SantosNo ratings yet
- Imperial College COVID19 Global Impact 26-03-2020v2Document19 pagesImperial College COVID19 Global Impact 26-03-2020v2Branko BrkicNo ratings yet
- KingDrive Controls DocumentationDocument62 pagesKingDrive Controls DocumentationAlina PNo ratings yet
- Preprint Not Peer Reviewed: Hot Air Oven For Sterilization: Definition & Working PrincipleDocument7 pagesPreprint Not Peer Reviewed: Hot Air Oven For Sterilization: Definition & Working PrinciplepryankaNo ratings yet
- Troubleshoot of Basic Amplifier CircuitDocument4 pagesTroubleshoot of Basic Amplifier Circuitparvinder ranaNo ratings yet
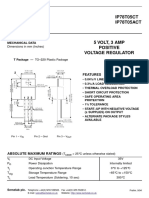
- IP78T05CT IP78T05ACT: FeaturesDocument4 pagesIP78T05CT IP78T05ACT: FeaturesRyn YahuFNo ratings yet
- How To Test Any ICDocument6 pagesHow To Test Any ICJawad Anwar100% (1)
- Medium-Voltage Switchgear: Type 8DA Extendable Fixed-Mounted Circuit-Breaker Switchgear Up To 40.5 KVDocument146 pagesMedium-Voltage Switchgear: Type 8DA Extendable Fixed-Mounted Circuit-Breaker Switchgear Up To 40.5 KVManohar PotnuruNo ratings yet
- To Design and Implement Passive Clipper Circuit.Document5 pagesTo Design and Implement Passive Clipper Circuit.samarth dukreNo ratings yet
- Talea: IssueDocument60 pagesTalea: IssueNickNo ratings yet
- lbp3250 PMDocument50 pageslbp3250 PMciphardNo ratings yet
- RS 3000 Technical SheetDocument1 pageRS 3000 Technical Sheetjackdec99No ratings yet
- Farenheyt Addressable Monitor ModuleDocument2 pagesFarenheyt Addressable Monitor ModuleChristine May CagaraNo ratings yet
- Industrial Equipment Brochure 021819 PDFDocument4 pagesIndustrial Equipment Brochure 021819 PDFKyaw Zin Htet0% (1)
- Tutorial of Non-Isolated DC/DC Converters in Continuous ModeDocument15 pagesTutorial of Non-Isolated DC/DC Converters in Continuous ModeSudip MondalNo ratings yet
- Project Report on Multistage BJT Amplifier DesignDocument7 pagesProject Report on Multistage BJT Amplifier DesignAlex Ferguson0% (1)
- ETP4860-B1A2 Embedded Power User ManualDocument93 pagesETP4860-B1A2 Embedded Power User ManualElisvan Jordan Guzman Espinoza100% (1)
- Operating Instructions: A2S130-AA03-39Document11 pagesOperating Instructions: A2S130-AA03-39Wagner MenezesNo ratings yet
- LED DICE WITH SLOW DOWN SIMULATES REALISTIC ROLLING ACTIONDocument6 pagesLED DICE WITH SLOW DOWN SIMULATES REALISTIC ROLLING ACTIONsuchigautamNo ratings yet
- TeSys K contactor data sheetDocument3 pagesTeSys K contactor data sheetAlexandru Octavian GrosuNo ratings yet
- 6T 2:1 Multiplexer and 1:2 Demultiplexer Design Using CPT LogicDocument13 pages6T 2:1 Multiplexer and 1:2 Demultiplexer Design Using CPT LogicSatya Moulika GokavarapuNo ratings yet
- SB MV FourWay DualVaneCassette3x3 ARNU483TAA4Document2 pagesSB MV FourWay DualVaneCassette3x3 ARNU483TAA4Giann CarlosNo ratings yet
- EDOC-Benefits & Advantages of Applying Externally Gapped Line ArrestersDocument20 pagesEDOC-Benefits & Advantages of Applying Externally Gapped Line ArrestersEl Comedor BenedictNo ratings yet
- Exploded View and Spare Part ListDocument1 pageExploded View and Spare Part ListJose Enrique Sanchez ThompsonNo ratings yet
- The 412 Operator and 455 D Control Panel Installation ManualDocument28 pagesThe 412 Operator and 455 D Control Panel Installation ManualSlobo KojadinovicNo ratings yet
- General Specifications: Model DY Model DYA Vortex FlowmetersDocument24 pagesGeneral Specifications: Model DY Model DYA Vortex FlowmetersSayed Ibrahim GhanemNo ratings yet
- Autoranging Insulation Tester RS-232 Window Version, Data LoggerDocument2 pagesAutoranging Insulation Tester RS-232 Window Version, Data Loggereuler165No ratings yet
- Switch Level ModelingDocument8 pagesSwitch Level Modelingsindhuja selvamNo ratings yet
- THHN/THWN copper building wireDocument2 pagesTHHN/THWN copper building wireButch BuciaNo ratings yet
- Amplifier: Superior SeriesDocument10 pagesAmplifier: Superior Seriesleroy.spencerNo ratings yet
- PRICELIST - 2020 Manila 1Document3 pagesPRICELIST - 2020 Manila 1JP De La PeñaNo ratings yet
- Proposed Office Building: Thahz Buhisan Dapogracion Rufo Aga-On AyagDocument1 pageProposed Office Building: Thahz Buhisan Dapogracion Rufo Aga-On AyagJhon SabinoNo ratings yet