You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- P K Dey Sarkar English Grammar PDFDocument2 pagesP K Dey Sarkar English Grammar PDFSourav Mandal25% (12)
- Chapter 1 - The Process of ResearchDocument15 pagesChapter 1 - The Process of ResearchBelmin Beganović50% (2)
- Hansgeorg Gadamer Gadamer On Celan Who Am I and Who Are You and Other Essays 1Document191 pagesHansgeorg Gadamer Gadamer On Celan Who Am I and Who Are You and Other Essays 1Martin JeanNo ratings yet
- 16 PF ApqDocument13 pages16 PF Apqdina alcantaraNo ratings yet
- CommandsDocument10 pagesCommandsstudentscornersNo ratings yet
- Basic Business CommunicationDocument24 pagesBasic Business CommunicationstudentscornersNo ratings yet
- UGC Public Notice Reg Equivalency of Degrees PDFDocument1 pageUGC Public Notice Reg Equivalency of Degrees PDFstudentscornersNo ratings yet
- References:: - Applying UML and Patterns Craig Larman - Patterns in Java, Volume 2 Mark GrandDocument76 pagesReferences:: - Applying UML and Patterns Craig Larman - Patterns in Java, Volume 2 Mark GrandstudentscornersNo ratings yet
- Chapter7 New-OBJECT ORIENTED ANALYSIS AND DESIGNDocument32 pagesChapter7 New-OBJECT ORIENTED ANALYSIS AND DESIGNstudentscornersNo ratings yet
- Server-Side Programming: Java Servlets: Web Technologies A Computer Science PerspectiveDocument115 pagesServer-Side Programming: Java Servlets: Web Technologies A Computer Science PerspectivestudentscornersNo ratings yet
- Introduction To Neuro-Fuzzy (NF) and Soft Computing (SC)Document17 pagesIntroduction To Neuro-Fuzzy (NF) and Soft Computing (SC)studentscornersNo ratings yet
- AI-SAMS-T1-v3-OBJECT ORIENTED ANALYSIS AND DESIGNDocument101 pagesAI-SAMS-T1-v3-OBJECT ORIENTED ANALYSIS AND DESIGNstudentscornersNo ratings yet
- Host Objects: Browsers and The DOM: Web Technologies A Computer Science PerspectiveDocument60 pagesHost Objects: Browsers and The DOM: Web Technologies A Computer Science PerspectivestudentscornersNo ratings yet
- Jean-Claude Latombe: Ai - Stanford.edu/ LatombeDocument24 pagesJean-Claude Latombe: Ai - Stanford.edu/ LatombestudentscornersNo ratings yet
- 09-OODesign-OBJECT ORIENTED ANALYSIS AND DESIGNDocument51 pages09-OODesign-OBJECT ORIENTED ANALYSIS AND DESIGNstudentscornersNo ratings yet
- Last Time: Boundary Object ResponsibilitiesDocument16 pagesLast Time: Boundary Object ResponsibilitiesstudentscornersNo ratings yet
- Basic Facilitation SkillsDocument44 pagesBasic Facilitation SkillsMasilamani Ramasamy100% (2)
- Daily RoutineDocument1 pageDaily RoutineAntioquia EnglishNo ratings yet
- BEdCourseCode101 Unit1Unit2Document69 pagesBEdCourseCode101 Unit1Unit2Rashid SarfarazNo ratings yet
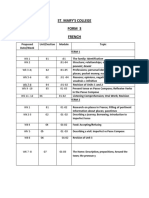
- Form 3 FrenchDocument2 pagesForm 3 FrenchJohn DoeNo ratings yet
- DLL Template Sept. 23-27, 2019Document5 pagesDLL Template Sept. 23-27, 2019Jennifer V. RamosNo ratings yet
- Dr. Jayesh PatidarDocument49 pagesDr. Jayesh PatidarDr. Jayesh Patidar100% (2)
- Ece006 Labexercise12Document15 pagesEce006 Labexercise12Krizzia Anne ShengNo ratings yet
- Japanese Particles in Action PDFDocument110 pagesJapanese Particles in Action PDFIuliana RotaruNo ratings yet
- Action Research ProposalDocument15 pagesAction Research ProposalCarl Dionne B. PuyatNo ratings yet
- Prelim Adtech Week4 BDocument5 pagesPrelim Adtech Week4 BLadybelle GototosNo ratings yet
- Darpa SN 18 06Document5 pagesDarpa SN 18 06Chan JackieNo ratings yet
- KCAU - Distance Learning - HCI ModuleDocument129 pagesKCAU - Distance Learning - HCI ModuleAlvo KamauNo ratings yet
- Intasc Standard 8 - MusedDocument2 pagesIntasc Standard 8 - Musedapi-350980452No ratings yet
- Modal Verbs Chart With Rephrasing Tips and 20 Sentences To RephraseDocument4 pagesModal Verbs Chart With Rephrasing Tips and 20 Sentences To RephrasempotbNo ratings yet
- Stakeholder Engagement in Destination Management: A Systematic Review of LiteratureDocument16 pagesStakeholder Engagement in Destination Management: A Systematic Review of LiteratureΑντώνης ΤσίκοςNo ratings yet
- Transitional WordsDocument9 pagesTransitional WordsSheryl HarrisonNo ratings yet
- Case 2-Major DepressionDocument4 pagesCase 2-Major DepressionRuby Jane LaquihonNo ratings yet
- Least Learned SkillsDocument6 pagesLeast Learned SkillsVILLA 2 ANACITA LOCIONNo ratings yet
- Makalah Bahasa InggrisDocument5 pagesMakalah Bahasa InggrisJali TambunanNo ratings yet
- An Analysis of English Phrasal Verb in Abandon Novel and Its TranslationDocument7 pagesAn Analysis of English Phrasal Verb in Abandon Novel and Its TranslationSiti DidahNo ratings yet
- Final PresentationDocument10 pagesFinal PresentationSittie Nabila PanandiganNo ratings yet
- Syllabus For Assamese - (Code 114) 2019-20 BackgroundDocument7 pagesSyllabus For Assamese - (Code 114) 2019-20 Backgroundchin chanNo ratings yet
- भाषापरिच्छेदः, 1850Document267 pagesभाषापरिच्छेदः, 1850aals100% (1)
- Template Udl at - Group FDocument4 pagesTemplate Udl at - Group Fapi-523047827No ratings yet
- Organism-Oriented Ontology - Audronė Žukauskaitė - 1, 2023 - Edinburgh University Press - 9781399510547 - Anna's ArchiveDocument186 pagesOrganism-Oriented Ontology - Audronė Žukauskaitė - 1, 2023 - Edinburgh University Press - 9781399510547 - Anna's ArchiveEdwin LoNo ratings yet
- Microcurricular Planning by Skills and Performance Criteria Norma 2017Document3 pagesMicrocurricular Planning by Skills and Performance Criteria Norma 2017Jackson Bajaña75% (4)