You might also like
- An Introduction To Vibration Aspects of Two-Stroke Diesel Engines I, N ShipsDocument11 pagesAn Introduction To Vibration Aspects of Two-Stroke Diesel Engines I, N Shipshpss77100% (1)
- Damping of Torsional Vibrations of Ship Engine Crankshafts - General Selection Methods of Viscous Vibration DamperDocument5 pagesDamping of Torsional Vibrations of Ship Engine Crankshafts - General Selection Methods of Viscous Vibration Dampersuhas110No ratings yet
- Indicator Diagrams, Power Card, Draw Card, Power CalculationDocument16 pagesIndicator Diagrams, Power Card, Draw Card, Power CalculationRavi VikneshNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Ship Vibration GN E-Jan15 PDFDocument83 pagesShip Vibration GN E-Jan15 PDFDwi PramonoNo ratings yet
- 08 VibrationDocument10 pages08 VibrationAisha Zaheer0% (1)
- Abs - Ship Vibration - 2021Document87 pagesAbs - Ship Vibration - 2021Jonathan BrasilNo ratings yet
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDocument17 pagesThe Influence of Gravity On The Performance of Planing Vessels in Calm WaternaufragatoNo ratings yet
- GM Motors &DELPHI Vibration STD PDFDocument66 pagesGM Motors &DELPHI Vibration STD PDFMachineryeng0% (1)
- Types of Vibrations On Ships - Machinery VibrationsDocument8 pagesTypes of Vibrations On Ships - Machinery VibrationsSuzane FerreiraNo ratings yet
- ED139 VA Vibration Analysis Certification Guide v5Document18 pagesED139 VA Vibration Analysis Certification Guide v5pheno vibraNo ratings yet
- Lateral Vibration Prediction Issues Yuriy BatrakDocument83 pagesLateral Vibration Prediction Issues Yuriy Batraksvistomina100% (1)
- 6.1 - SL2006-469 PDFDocument15 pages6.1 - SL2006-469 PDFValeriy DomashenkoNo ratings yet
- Practical Bollard PullDocument6 pagesPractical Bollard PullKrish FunkNo ratings yet
- SV ToolkitDocument67 pagesSV ToolkitJack PanduNo ratings yet
- 147-ShipVib Guidance Note On Ship VibrationDocument104 pages147-ShipVib Guidance Note On Ship VibrationUthul Villa SanchezNo ratings yet
- Surveyor Guide Notes On Tail Shaft Survey: 1. Propeller Shafts 1.1 Propeller Shaft Clearances - MeasurementDocument9 pagesSurveyor Guide Notes On Tail Shaft Survey: 1. Propeller Shafts 1.1 Propeller Shaft Clearances - MeasurementHim SatiNo ratings yet
- 4.3 Vibration Control of ShipDocument13 pages4.3 Vibration Control of ShipTuah BugisNo ratings yet
- Axial Vibration DamperDocument2 pagesAxial Vibration Damperanon_643160229No ratings yet
- (Polish Maritime Research) Damping of Torsional Vibrations of Ship Engine Crankshafts - General Selection Methods of Viscous Vibration DamperDocument5 pages(Polish Maritime Research) Damping of Torsional Vibrations of Ship Engine Crankshafts - General Selection Methods of Viscous Vibration DamperCristiano CardosoNo ratings yet
- Operating Manual For TEST RIG SHIP - Pres-Vac Engineering ApsDocument14 pagesOperating Manual For TEST RIG SHIP - Pres-Vac Engineering ApsGarry Bernard NelsonNo ratings yet
- 4.3.b - Scr-System-Imo-Tier-IiiDocument22 pages4.3.b - Scr-System-Imo-Tier-IiiRover DmsNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Advanced Shafting AlignmentDocument10 pagesAdvanced Shafting AlignmentpropulziNo ratings yet
- ABB Generations - 18 CO2 Emmissions From Ships - The Impact of EEDI and SEEMPDocument6 pagesABB Generations - 18 CO2 Emmissions From Ships - The Impact of EEDI and SEEMPyw_oulalaNo ratings yet
- Calculation of Torsional Vibration Tvd-1121-Pt110Document19 pagesCalculation of Torsional Vibration Tvd-1121-Pt110asdNo ratings yet
- Fluid Film Bearing Diagnostics Using Envelope SpectraDocument14 pagesFluid Film Bearing Diagnostics Using Envelope SpectraJose Luis RattiaNo ratings yet
- Propeller-Induced Hull Vibration - Analytical MethodsDocument14 pagesPropeller-Induced Hull Vibration - Analytical MethodsBill Erick CastilloNo ratings yet
- WinGD Guide For Judging Condition of Relevant Piston Running Components V4 June 2020 PDFDocument36 pagesWinGD Guide For Judging Condition of Relevant Piston Running Components V4 June 2020 PDFStancu PetricăNo ratings yet
- What Is The Difference Between Low Speed Balancing and Dynamic Balancing in Turbine Rotor PerspectiveDocument10 pagesWhat Is The Difference Between Low Speed Balancing and Dynamic Balancing in Turbine Rotor Perspectiveabdulyunus_amir100% (1)
- Marine Standards IACSDocument8 pagesMarine Standards IACSAbhinav OjhaNo ratings yet
- Panel M-19 Ship Tria - Guide For Sea Trials - jan.1989.T-R1Document128 pagesPanel M-19 Ship Tria - Guide For Sea Trials - jan.1989.T-R1maria_bustelo_2No ratings yet
- L21/31-VBS: Imo Tier Ii - Propulsion PackageDocument24 pagesL21/31-VBS: Imo Tier Ii - Propulsion PackageПетя ИвановNo ratings yet
- Propulsion Shafting Whirling Vibration: Case Studies and PerspectivesDocument16 pagesPropulsion Shafting Whirling Vibration: Case Studies and PerspectivesMuhammad Fahmmi Bin MahmudNo ratings yet
- NOx Questions and Answers July 02 PDFDocument27 pagesNOx Questions and Answers July 02 PDFMannMannNo ratings yet
- Marine Diesel Engine and NoiseDocument8 pagesMarine Diesel Engine and NoisepawanNo ratings yet
- Is Iso 20283 2 2008Document22 pagesIs Iso 20283 2 2008ferdincaninNo ratings yet
- Vibration AnalysisDocument10 pagesVibration AnalysisYasser BayoumyNo ratings yet
- ABB Optimization of Engine Performance 2009Document40 pagesABB Optimization of Engine Performance 2009Napoleon MpNo ratings yet
- DESIGN & TORSIONAL VIBRATION ANALYSIS OF CONTRA ROTATING PROPELLER SHAFT - IEEE - April - 2020Document4 pagesDESIGN & TORSIONAL VIBRATION ANALYSIS OF CONTRA ROTATING PROPELLER SHAFT - IEEE - April - 2020We learnNo ratings yet
- Classification Requirements For Shaft Alignment CalculationDocument7 pagesClassification Requirements For Shaft Alignment CalculationaytepeNo ratings yet
- Mil STD 167 1a. Vibration TestingDocument23 pagesMil STD 167 1a. Vibration TestingNOVOLOKNo ratings yet
- Ship Margin Line Code of Federal RegulationsDocument3 pagesShip Margin Line Code of Federal RegulationsAnonymous JSHUTpNo ratings yet
- Vibration EngineeringDocument194 pagesVibration EngineeringSaptarshi Basu100% (1)
- Cap VS CasDocument3 pagesCap VS CasNilesh DalviNo ratings yet
- Article Overall Vibration Values For Reliable Wind Turbines PDFDocument4 pagesArticle Overall Vibration Values For Reliable Wind Turbines PDFrrNo ratings yet
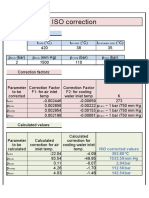
- Iso CorrectionDocument2 pagesIso CorrectionValeriy DomashenkoNo ratings yet
- Shaft Alignment Using Strain Gauges - Case StudiesDocument16 pagesShaft Alignment Using Strain Gauges - Case StudiesAndre BlueNo ratings yet
- Vibration Monitoring and AnalysisDocument8 pagesVibration Monitoring and AnalysishashimtkmceNo ratings yet
- Phase Analysis: Making Vibration Analysis Easier: SearchDocument4 pagesPhase Analysis: Making Vibration Analysis Easier: Searchdillipsh123No ratings yet
- Experience With Torsional Vibration at Reciprocating CompressorsDocument14 pagesExperience With Torsional Vibration at Reciprocating CompressorsÏmŗäņPŗïņċëNo ratings yet
- Unit 2 Part 1 Flwheel PDFDocument49 pagesUnit 2 Part 1 Flwheel PDFRachit SemaltyNo ratings yet
- Important Short Questions DYNAMICS AND DESIGN OF MACHINERYDocument32 pagesImportant Short Questions DYNAMICS AND DESIGN OF MACHINERYramos mingoNo ratings yet
- Chapter 7Document45 pagesChapter 7Gabrielle ChengNo ratings yet
- Main ShaftDocument7 pagesMain Shaftcosta59dac9242No ratings yet
- Current PulsationDocument12 pagesCurrent Pulsationtopazamp123No ratings yet
- Torsional Vibration Analysis - Electromagnetic Effects Across Induction Motor Air GapDocument11 pagesTorsional Vibration Analysis - Electromagnetic Effects Across Induction Motor Air GapCamilo Andres QuinteroNo ratings yet
- Ivo Senjanović, N Even Hadžić, Lech Murawski, Nikola Vladimir, Neven AlujevićDocument39 pagesIvo Senjanović, N Even Hadžić, Lech Murawski, Nikola Vladimir, Neven AlujevićparvejNo ratings yet
- Murawski Forces 2005 4Document7 pagesMurawski Forces 2005 4Anonymous K3FaYFlNo ratings yet
- Vibration Analysis of Composite Reinforced B PillarDocument9 pagesVibration Analysis of Composite Reinforced B PillarBabai DasNo ratings yet
- Waves in Media: Ashcroft and Mermin, Solid State Physics (Saunders College, 1976, Page 553)Document42 pagesWaves in Media: Ashcroft and Mermin, Solid State Physics (Saunders College, 1976, Page 553)Amina lbrahimNo ratings yet
- MIT8 03SCF16 PracticeFinalExam1 Solutions 3Document18 pagesMIT8 03SCF16 PracticeFinalExam1 Solutions 3Kevin Erique Solano JaramilloNo ratings yet
- Dynamic Young's Modulus, Shear Modulus, and Poisson's Ratio by Impulse Excitation of VibrationDocument16 pagesDynamic Young's Modulus, Shear Modulus, and Poisson's Ratio by Impulse Excitation of VibrationNav TalukdarNo ratings yet
- Dynamics Old Question PaperDocument3 pagesDynamics Old Question PaperFrank JohnNo ratings yet
- Structural Dynamic Analysis of A Cantilever BeamDocument41 pagesStructural Dynamic Analysis of A Cantilever Beamselva_raj215414No ratings yet
- Ansys Acoustic AnalysisDocument124 pagesAnsys Acoustic Analysissweety kumari100% (2)
- Material: Part I: Introduction To System IdentificationDocument79 pagesMaterial: Part I: Introduction To System Identificationvince kafuaNo ratings yet
- Syllabus PDFDocument65 pagesSyllabus PDFAbhishekSreekumarNo ratings yet
- Numerical Analysis of Automotive Disc Brake Squeal: A ReviewDocument25 pagesNumerical Analysis of Automotive Disc Brake Squeal: A ReviewMarzip ParnNo ratings yet
- Technical Whitepaper: Sonic V - Acoustic Pulse Reflectometry (APR) Inspection SystemDocument11 pagesTechnical Whitepaper: Sonic V - Acoustic Pulse Reflectometry (APR) Inspection SystemassurendranNo ratings yet
- Release Notes of STRUDS 2008Document17 pagesRelease Notes of STRUDS 2008satoni12No ratings yet
- Blade Fluttering TutorialDocument34 pagesBlade Fluttering TutorialTheNo ratings yet
- Mode Superposition ExampleDocument10 pagesMode Superposition ExampleThabiso MotalingoaneNo ratings yet
- Dynamic and Introduction To Explicit PDFDocument41 pagesDynamic and Introduction To Explicit PDFSwaraj Deep SharmaNo ratings yet
- How To Pump A SwingDocument17 pagesHow To Pump A SwingVictor PachecoNo ratings yet
- Fan Mechanics: TorqueDocument37 pagesFan Mechanics: Torquevalerio.garibayNo ratings yet
- Sound and HearingDocument28 pagesSound and HearingI AM DJNo ratings yet
- Ultrasonics Testing Level IDocument165 pagesUltrasonics Testing Level IMirza Safeer Ahmad100% (1)
- Pana USDocument52 pagesPana USflorin100% (1)
- The Unique High-Rise Structure of The MNC Tower 2 Building in JakartaDocument8 pagesThe Unique High-Rise Structure of The MNC Tower 2 Building in JakartaNityananda Permadi TjokrodimurtiNo ratings yet
- Cufsm IntroductionDocument14 pagesCufsm Introductionchristos032100% (1)
- Thin Walled StructuresDocument7 pagesThin Walled Structuresnanduslns07No ratings yet
- The Physics of Wave PDFDocument465 pagesThe Physics of Wave PDFAlex ZXNo ratings yet
- 10.3.2 Infinite Square Well: −Iωt −Iet/¯ HDocument4 pages10.3.2 Infinite Square Well: −Iωt −Iet/¯ HChandler LovelandNo ratings yet
- Spectrum Analysis Using StaadDocument10 pagesSpectrum Analysis Using StaadGautam PaulNo ratings yet
- Stimulated Raman ScatteringDocument12 pagesStimulated Raman ScatteringMr. L.B. LeeNo ratings yet
- Vibrations and Stability - J.J.Thomsen, 2003 - IndexDocument9 pagesVibrations and Stability - J.J.Thomsen, 2003 - IndexBenjaminNo ratings yet
- Normal Modes MoreDocument2 pagesNormal Modes MoreFUN PHYSICS FOR NEETNo ratings yet
- Aerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great BeltDocument25 pagesAerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great Beltlamkinpark3373No ratings yet